从ros开始到turtlebot仿真建图再到RRT_exploration
turtlebot从ros开始到turtlebot仿真建图再到RRT_exploration准备ros的包仿真器测试turtlebot仿真建图rrt_exploration(自主探索建图)
从ros开始到turtlebot仿真建图再到RRT_exploration
作者:must try
这是写给队友的快速上手文档,可能不完整大家可以自己去百度或者留言讨论。
准备ubuntu 16.04
ros-kinetic
注意:每一个ubuntu版本都和一个ros版本对应。ros的安装和使用配置参考(https://wiki.ros.org/)
关键的就是要配置环境。最好参考官网给出的教程。这样可以省去很多麻烦,已经排过雷。
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
注意!!一定要检查一下你安装的ros是不是装全了。
检查是否安装了gazebo和rviz.这两个可视化仿真软件很重要.一般会在安装ros的时候一起装了.
以下的包是需要安装的,有的可能你安装过了,但是没关系也可以通过指令试一下.
$ sudo apt-get install ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-kobuki ros-kinetic-kobuki-core ros-kinetic-kobuki-gazebo
$ sudo apt-get install python-opencv python-numpy python-scikits-learn
仿真器测试
打开一个终端
roslaunch turtlebot_gazebo turtlebot_world.launch
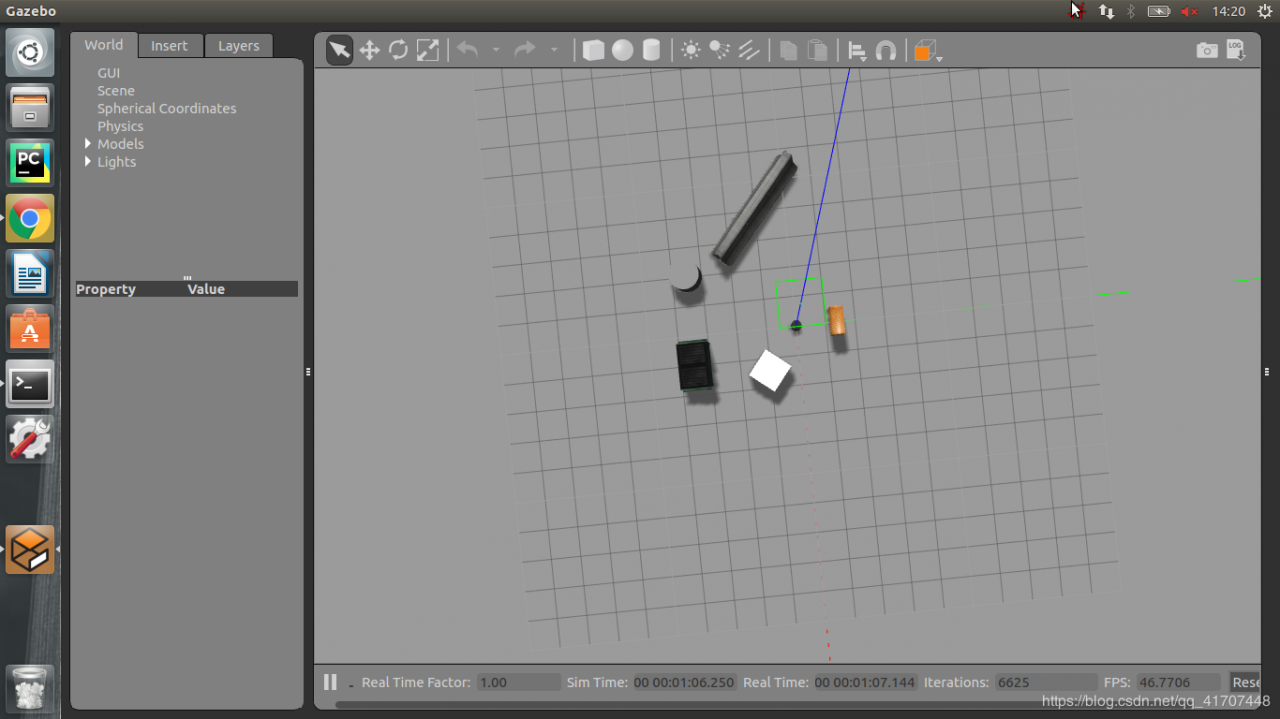
如果出现卡在初始界面的问题就需要下载models,具体解决方式参考参考
这个界面是可以转动平移的,交互方式和catia类似.
下一步运行rviz:
roslaunch turtlebot_rviz_launchers view_robot.launch
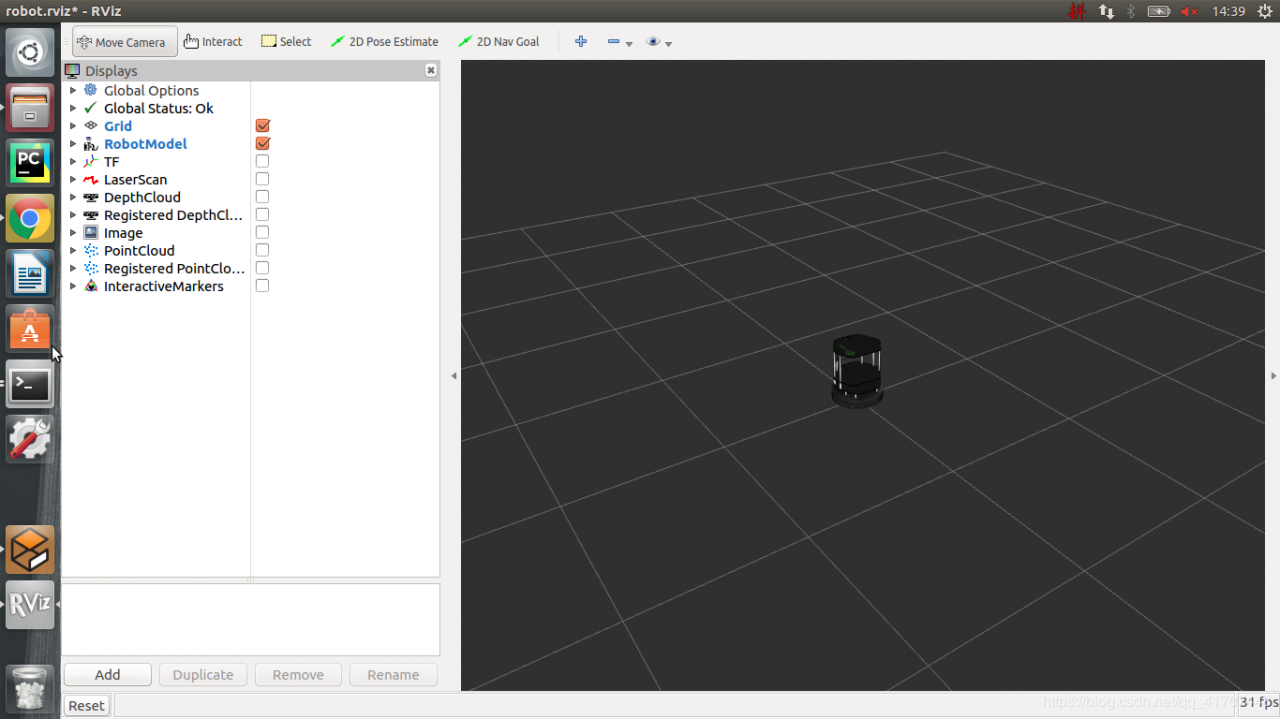
如果到这里都没出现问题,那就恭喜.可以下一部了.
如果出现问题了,可以百度解决(我对你的不幸表示难过.png)
roslaunch turtlebot_gazebo turtlebot_world.launch
turtlebot官方建图gmapping工具
roslaunch turtlebot_gazebo gmapping_demo.launch
使用rviz可视化建图过程
roslaunch turtlebot_rviz_launchers view_navigation.launch
这里有的教程说要更换Globoal map和local map 下的topic为/map,但是我也不知道为什么(求解)
上述三步成成功连就如下: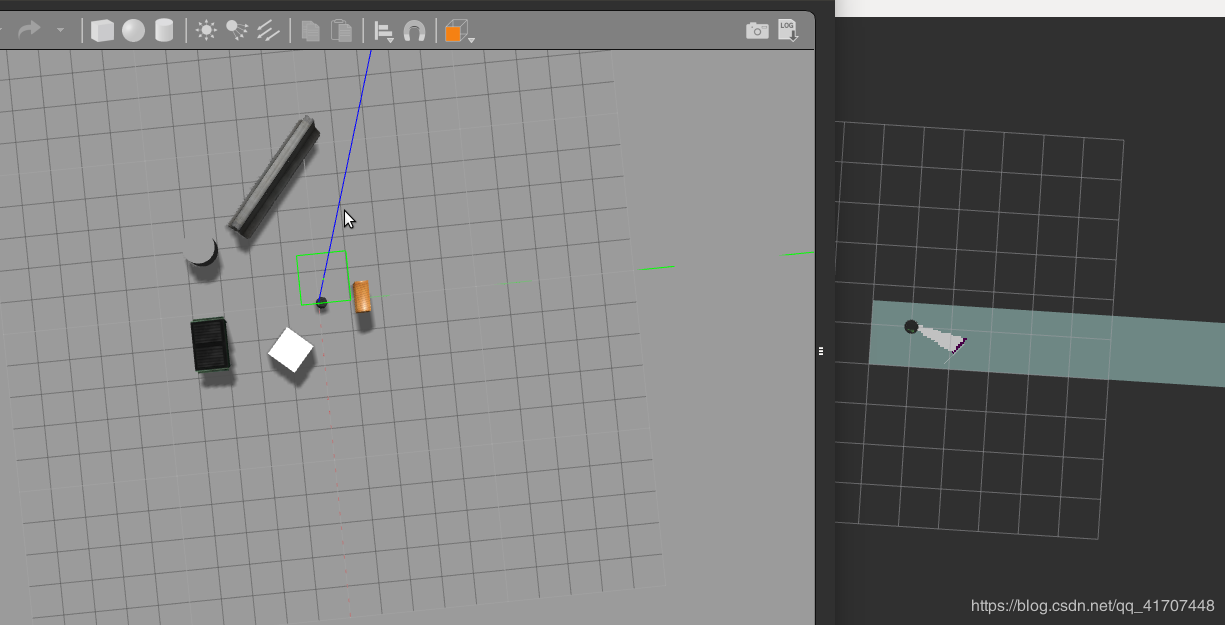
4. 使用键盘控制机器人行走建图
roslaunch turtlebot_teleop keyboard_teleop.launch --screen
这样就可以边走边建图了,但是说实话建图效果不太理想.不知道哪里可以改进的.如果有大佬看见可以留言讨论一下.
rrt_exploration(自主探索建图)这块主要是使用了rrt_exploration_tutorials和rrt_exploration这两个包链接.
首先创建一个包
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
然后
gedit ~/.bashrc
在文件最后添加
source ~/catkin_ws/devel/setup.bash
然后安装装上述的两个包
cd ~/catkin_ws/src
git clone https://github.com/hasauino/rrt_exploration
git clone https://github.com/hasauino/rrt_exploration_tutorials.git
catkin_make
如果都没有问题那就恭喜了.有问题上百度,肯定能解决.如果下载太慢就换个源.
接下来加载仿真环境和环境探索(这一块比较简单,我也是看得其他的博客所以略写参考)B站上也有视频链接,对你的思路肯定也有帮助B站链接
roslaunch rrt_exploration_tutorials single_simulated_house.launch
roslaunch rrt_exploration single.launch
结束,之后的操纵慢慢弄,几分钟就可以搞好的.这真是个神奇又好玩的东西.总体呢,我写的比较简单,有兴趣的可以私聊咱们讨论讨论嘿嘿.
作者:must try