关于ROS2安装与docker环境使用
目录
为什么要用docker
docker安装
拉取ROS镜像
运行ROS小海龟
为什么要用dockerdocker是一个容器,可以用他来装载镜像。我可以把我的基础环境用docker封装成镜像,大家都可以用这个镜像。
学习ROS的过程中发现安装过程会遇到很多问题,相信很多同学都被安装时的问题挡住,于是想到我可以做个ROS的镜像给自己与大家使用。于是选择了docker,然后发现直接有现成的镜像————轻松入手。
改进过后还可以封装成自己的镜像。
docker安装1 更新软件列表
sudo apt-get update
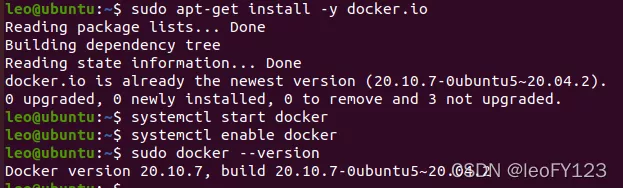
2 安装docker
sudo apt-get install -y docker.io
3 配置开机启动
systemctl start docker
systemctl enable docker
4 检测安装成功
sudo docker --version
我这边使用的的与foxy版本
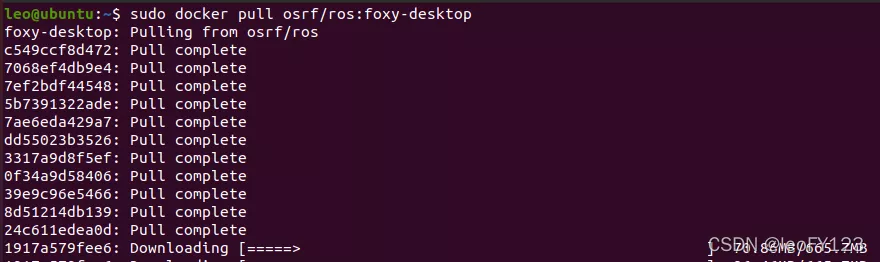
1 下载镜像文件,3个多G需要等待一会
sudo docker pull osrf/ros:foxy-desktop
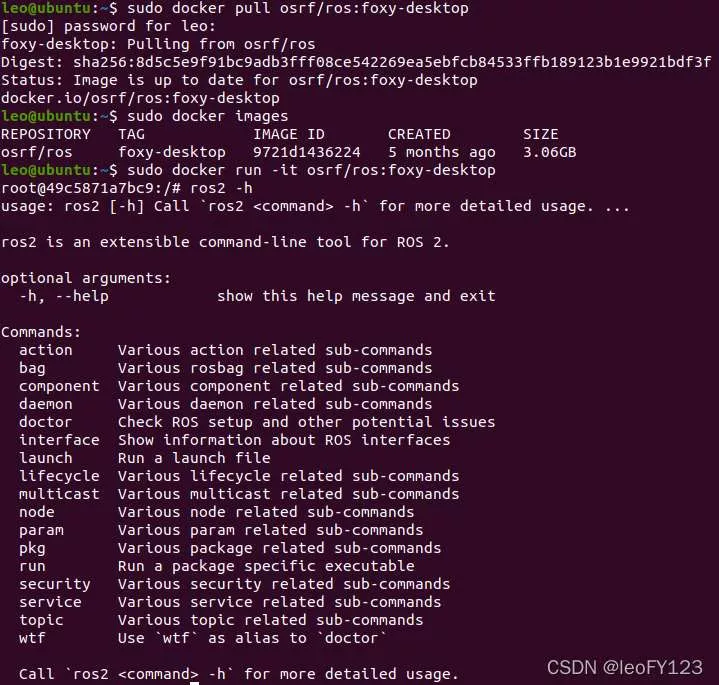
s2查看镜像信息
sudo docker images
3 启动镜像
sudo docker run -it osrf/ros:foxy-desktop
4 enjoy for your Ros
这一步显示ROS2的帮助信息,ROS2已经装好了,是不是很快!!!
ros2 -h
ros2 run turtlesim turtlesim_node
新开一个终端,重新启动镜像进入docker环境
sudo docker run -it osrf/ros:foxy-desktop
ros2 run turtlesim turtle_teleop_key
到此这篇关于关于ROS2安装与docker环境使用的文章就介绍到这了,更多相关ROS2安装与docker环境内容请搜索软件开发网以前的文章或继续浏览下面的相关文章希望大家以后多多支持软件开发网!
相关文章
Irisa
2020-12-24
Elizabeth
2020-01-29
Carly
2023-07-22
Sabah
2023-07-22
Rhea
2023-07-22
Serafina
2023-08-08
Pandora
2023-08-08
Tani
2023-08-08
Tanisha
2023-08-08
Gitana
2023-08-08
Kara
2023-08-08
Querida
2023-08-08
Victoria
2023-08-08
Nissa
2023-08-08
Anna
2023-08-08
Viridis
2023-08-08
Tertia
2023-08-08