360°舵机控制
![]()
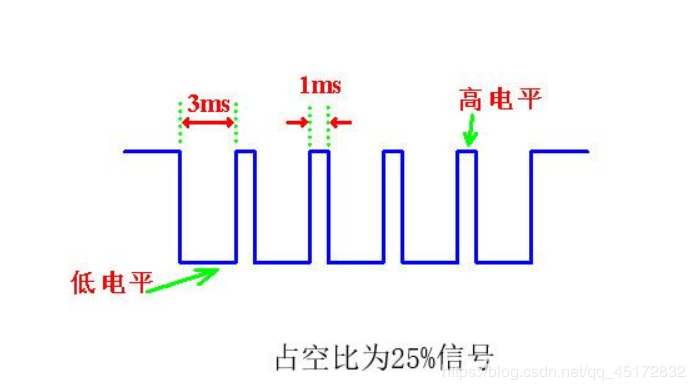
360°舵机要如何控制它旋转:
1、控制信号是一种脉宽调制(PWM)信号,凡是微控制器能轻松的产生这种信号。在此文中,常用的Arduino开发环境下的微控制器。
2、 脉冲的高电平持续1到2毫秒(ms),也就是1000到2000微秒(µs)。在1000µs时,舵机左满舵。在2000µs时,右满舵。不过可以通过调整脉宽来实现更大或者更小范围内的运动。
3、控制脉冲的低电平持续20毫秒。每经过20毫秒(50次每秒),就要再次跳变为高电平,否则舵机就可能罢工,难以保持稳定。不过要是想让它一瘸一拐的跳舞,倒可以采取这种方法。

![]()
代码:
棕色----------------------GND
红-------------------------VCC
橙色----------------------信号线

#include
#define uchar unsigned char
#define uint unsigned int
sbit pwm=P1^0; //信号输出
sbit k1=P3^1; //按键k1接P3^1,控制顺时针旋转
sbit k2=P3^2; //按键k2接P3^2,控制逆时针旋转
uchar count=0;
uchar n=5; //初始位置-在0°附近 改变n值可以改变舵机的初始位置
//这个n值在不同的舵机可能存在一点误差,可以改变他的值来试试具体位置
void delay5ms() //延时5ms
{
unsigned char a,b;
for(b=19;b>0;b--)
for(a=130;a>0;a--);
}
void key() //按键处理
{
if(k1==0)
{
delay5ms();
if(k1==0)
{
while(k1==0); //判断当键盘松开时
if(n=6) n--; //判断是否旋转到0°
else n=3;
}
}
}
void InitTimer() // 定时器设置 0.1ms 11.0592Mhz
{
TMOD = 0x01;
TH0 = 0xFF;
TL0 = 0XA3;
EA = 1;
ET0 = 1;
TR0 = 1;
}
void main()
{
InitTimer();
while(1)
{
key();
}
}
void Timer() interrupt 1 //特别注意此处,0--外部中断0,1--定时器中断0,2--外部中断1
{ //3--定时器中断1,4--串口中断1
TH0 = 0xFF;
TL0 = 0xA3;
count++;
if(count<=200)
{
if(count<=n)
{
pwm=1;
}
else
{
pwm=0;
}
}
else
{
count=0;
pwm=0;
}
}

作者:James Bin