舵机跟着太阳转
接线:
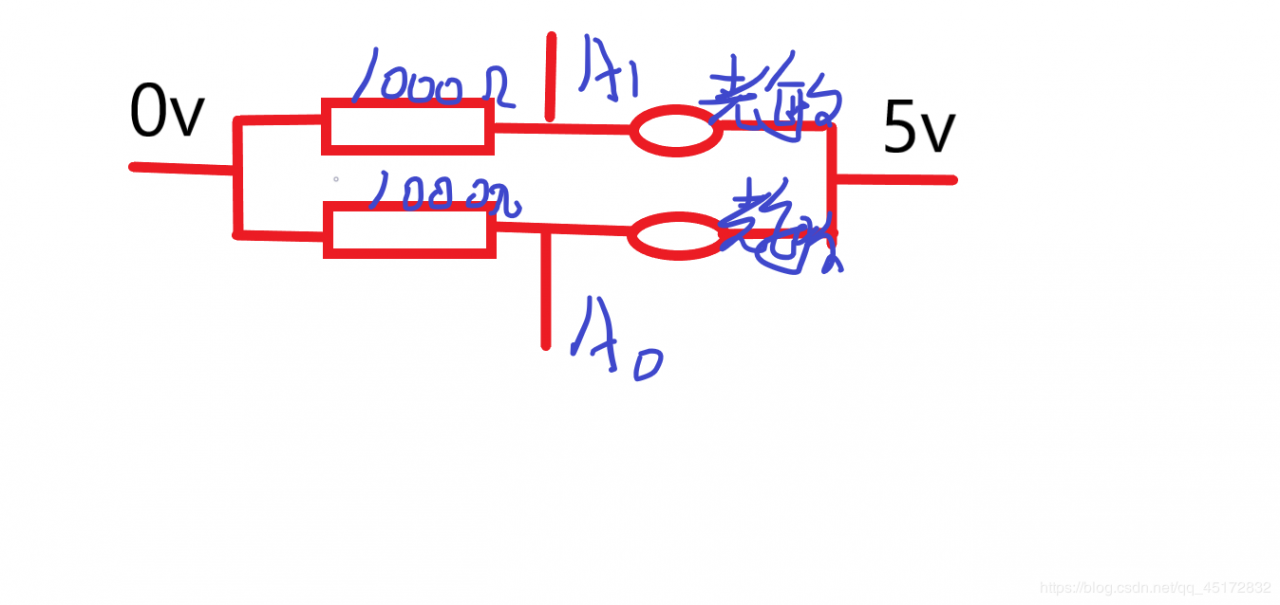
首先两个光敏电阻与电阻串联后并联
给并联电路供5v直流电
arduino A0\A1分别连接两个光敏电阻两端电压(其实是一端)
舵机红线——3.3v
舵机黑线——GND
舵机黄线——信号输入(9号引脚)
代码:
#include
//ADC测电压引脚定义
int L_ADC = A0;
int R_ADC = A1;
//舵机变量
Servo myservo; // 定义Servo对象来控制
int pos = 0; // 角度存储变量
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
//analogReference(INTERNAL); //调用板载1.1V基准源
analogReference(DEFAULT); //调用当前工作电压基准源
myservo.attach(9); // 舵机控制线连接数字9
pos=90;
myservo.write(pos); // 舵机角度写入
}
void loop() {
while(1)
{
// put your main code here, to run repeatedly:
int V_L = analogRead(L_ADC); //读取A0口的电压值
int V_R = analogRead(R_ADC); //读取A0口的电压值
//float temp = (1.1 * n * 100.0) / 1024;//初始化时,必须指明电压基准源:analogReference(INTERNAL); //调用板载1.1V基准源
float L_temp = (5.0 * V_L * 100.0) / 1024;
float R_temp = (5.0 * V_R * 100.0) / 1024;
/*
Serial.print("L_temp=");
Serial.print(L_temp);
Serial.print(" R_temp=");
Serial.println(R_temp);
*/
if(L_temp-R_temp>10)
{
/*Serial.println("电机右转");
Serial.print("L_temp=");
Serial.print(L_temp);
Serial.print(" R_temp=");
Serial.println(R_temp);
*/
if( pos>10)
{
pos=pos-1;
// in steps of 1 degree
myservo.write(pos); // 舵机角度写入
}
}
if(R_temp-L_temp>10)
{
/*Serial.println("电机左转");
Serial.print("L_temp=");
Serial.print(L_temp);
Serial.print(" R_temp=");
Serial.println(R_temp);
*/
if( pos<180)
{
pos=pos+1;
// in steps of 1 degree
myservo.write(pos); // 舵机角度写入
}
}
delay(10);
}
}
作者:James Bin