【用Proteus仿真Arduino】 07 - 舵机的控制
7.1 简介
作者:acktomas
学习对舵机的控制。
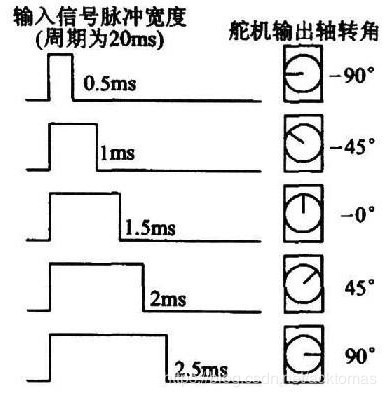
7.2 Servo舵机的控制信号是脉冲位置调制(PPM)信号,是一种宽度可调的周期性方波脉冲信号,周期一般为20ms,当方波的脉冲宽度改变时,舵机转轴的角度发生变化,角度变化与脉冲宽度的变化成正比。一般舵机的输出轴转角与输入信号的脉冲宽度之间的关系表示。
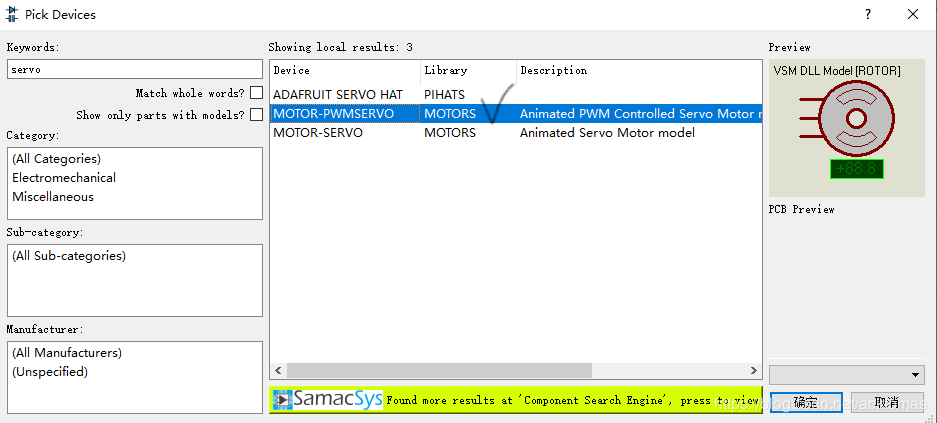
proteus仿真里面添加舵机,在元器件搜索栏中输入“servo”,并添加至元器件选择栏中。
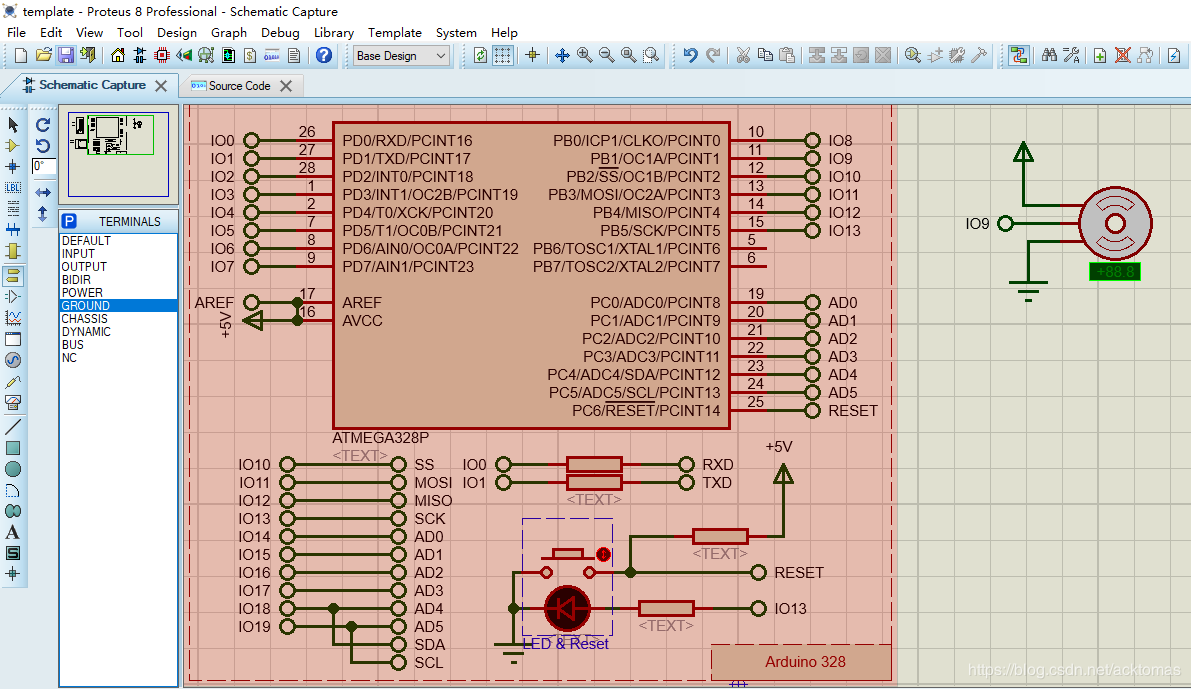
并将舵机中间的管脚接至数字口9脚,也就是ATmega328P的12管脚,同时上管脚接至+5V,下管脚接至地端,修改后的Proteus仿真图
#include
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
for (pos = 0; pos = 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
7.5 仿真

作者:acktomas