ROS下实现darknet_ros(YOLO V3)检测
一. 代码下载
代码Github主页:https://github.com/leggedrobotics/darknet_ros
下载命令:
mkdir -p catkin_workspace/src
cd catkin_workspace/src
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
cd ../
下载时间可能比较长,请耐心等待…
二. 编译
在ROS工作空间目录下,执行命令:
catkin_make -DCMAKE_BUILD_TYPE=Release
此时会开始编译整个项目,编译完成后会检查{catkin_ws}/darknet_ros/darknet_ros/yolo_network_config/weights文件下有没有yolov2-tiny.weights和yolov3.weights两个模型文件,默认下载好的代码里面为了节省体积是不带这两个模型文件的。因此编译之后会自动开始下载模型文件,此时又是一段漫长的等待时间。
如果刚好你之前已经下载好了模型文件,那就好了,在开始编译之前就把模型文件拷贝到上述文件夹下,就不会再次下载了。
三. 运行代码
1. 图像话题发布
因为darknet_ros会直接订阅指定的图像话题名,然后对图像进行检测,绘制检测框,并发布相应的检测话题,因此首先需要找一个能够发布图像话题的ROS包,这里推荐使用ROS官方提供的usb_cam驱动包,可以直接将电脑自带摄像头或连接电脑的USB摄像头采集的图像发布为ROS图像话题。
下载摄像头驱动:
sudo apt-get install ros-kinetic-usb-cam
然后发布摄像头图像话题:
roslaunch usb_cam usb_cam-test.launch
如果顺利的话应该可以看到实际的图像显示界面。

2. 运行darknet_ros
然后执行darknet_ros进行检测,在运行检测之前需要更改一下配置文件,使得darknet_ros订阅的话题与usb_cam发布的图片话题对应。
打开darknet_ros/config/ros.yaml文件,修改:
subscribers:
camera_reading:
topic: /camera/rgb/image_raw
queue_size: 1
为
subscribers:
camera_reading:
topic: /usb_cam/image_raw
queue_size: 1
回到darknet的工作空间根目录,执行:
source devel/setup.bash
roslaunch darknet_ros darknet_ros.launch
出现对摄像头采集图像的实时检测结果。


可以看到检测的结果还是有很大问题的!!
我们只需要把预训练集换成YOLO v3的来检测就可以了,更换如下:找到config文件可以看到如下的训练集

打开launch文件

修改 darknet_ros.launch
arg name="network_param_file" default="$(find darknet_ros)/config/yolov2-tiny.yaml"/
改为
arg name="network_param_file" default="$(find darknet_ros)/config/yolov3.yaml"/
如下:

然后重新启动:
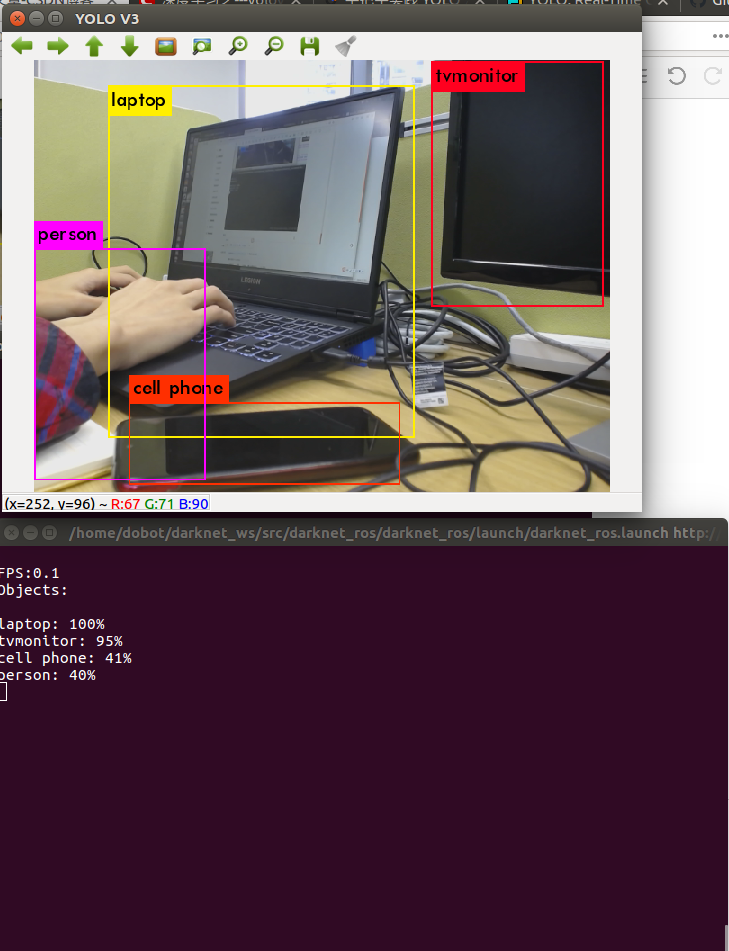
roslaunch darknet_ros darknet_ros.launch
检测结果如下:

多来几张结果:


后续有时间会尝试制作如何训练自己的训练集并在ROS下进行检测使用,谢谢!
作者:pd很不专业