(四)【矩阵论】(线性变换)线性变换的定义|线性变换的矩阵表示|零空间与值空间
【矩阵论专栏】
文章目录A 线性变换的定义B 线性变换的矩阵表示C 零空间与值空间 A 线性变换的定义(1)定义1(线性变换)设V!,V2V_!,V_2V!,V2是同一数域FFF上的线性空间,TTT是V1→V2V_1\rightarrow V_2V1→V2的映射,若对V1V_1V1中任意向量α,β\alpha,\betaα,β,以及数域FFF中任意元素kkk,有:T(α+β)=Tα+TβT(\alpha+\beta)=T\alpha+T\betaT(α+β)=Tα+TβT(kα=kTα)T(k\alpha=kT\alpha)T(kα=kTα)
则称TTT为线性空间V1V_1V1到V2V_2V2的线性变换(或线性算子)。
例1:
例2:
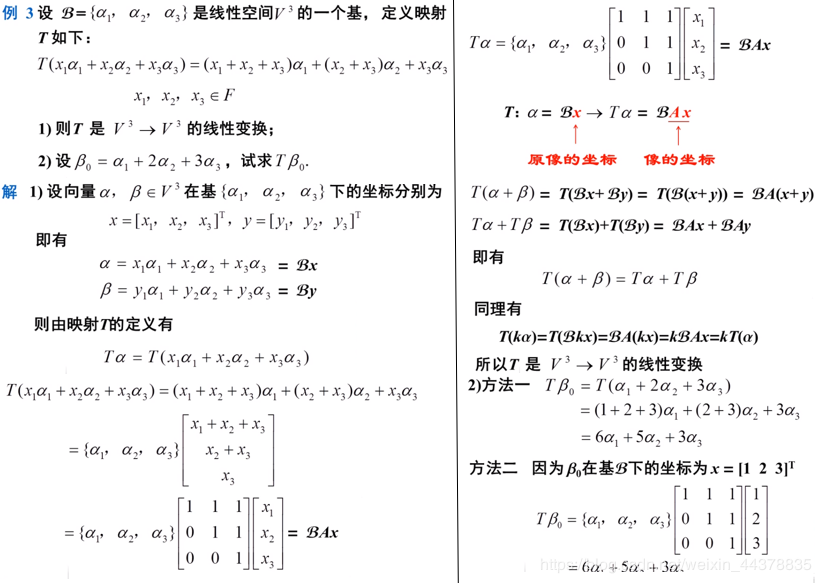
例3:
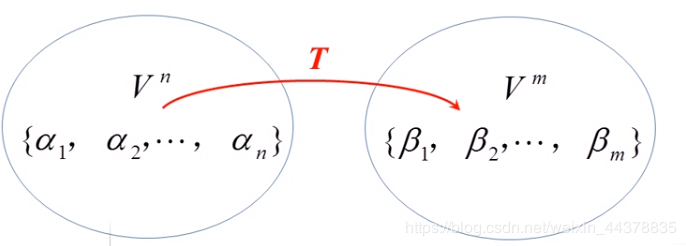
设TTT是Vn→VmV^n\rightarrow V^mVn→Vm的线性变换,Bα={α1,α2,...,αn}\Beta_\alpha=\{\alpha_1,\alpha_2,...,\alpha_n\}Bα={α1,α2,...,αn}与Bβ={β1,β2,...,βm}\Beta_\beta=\{\beta_1,\beta_2,...,\beta_m\}Bβ={β1,β2,...,βm}分别是VnV^nVn与VmV^mVm的基。
因为Tαi∈Vm,i=1,2,..,n.T\alpha_i\in V^m,i=1,2,..,n.Tαi∈Vm,i=1,2,..,n.设TαiT\alpha_iTαi在基Bβ={β1,β2,...,βm}\Beta_\beta=\{\beta_1,\beta_2,...,\beta_m\}Bβ={β1,β2,...,βm}下的坐标为:Ai=[a1i..ami],i=1,2,...,n.A_i=\begin{bmatrix}a_{1i}\\.\\.\\a_{mi}\end{bmatrix},i=1,2,...,n.Ai=⎣⎢⎢⎡a1i..ami⎦⎥⎥⎤,i=1,2,...,n.即有Tαi=BβAiT\alpha_i=\Beta_\beta A_iTαi=BβAi,i=1,2,…,n.
记TBα={Tα1,Tα2,...,Tαn}T\Beta_{\alpha}=\{T\alpha_1,T\alpha_2,...,T\alpha_n\}TBα={Tα1,Tα2,...,Tαn}
则有:TBα={Tα1,Tα2,...,Tαn}={BβA1,BβA2,...,BβAn}=Bβ{A1,A2,...,An}=BβAT\Beta_\alpha=\{T\alpha_1,T\alpha_2,...,T\alpha_n\}=\{\Beta_\beta A_1,\Beta_\beta A_2,...,\Beta_\beta A_n\}=\Beta_\beta\{A_1,A_2,...,A_n\}=\Beta_\beta ATBα={Tα1,Tα2,...,Tαn}={BβA1,BβA2,...,BβAn}=Bβ{A1,A2,...,An}=BβA
其中A=[A1,A2,...,An]A=[A_1,A_2,...,A_n]A=[A1,A2,...,An]
AAA:每一列对应的都是Bα里的向量αi做完线性变换T后,Tαi在基Bβ下的坐标\Beta_\alpha里的向量\alpha_i做完线性变换T后,T\alpha_i在基\Beta_\beta 下的坐标Bα里的向量αi做完线性变换T后,Tαi在基Bβ下的坐标
定义2 称矩阵AAA为线性变换TTT在基偶{Bα,Bβ}\{\Beta_{\alpha},\Beta_{\beta}\}{Bα,Bβ}下的矩阵。若TTT是Vn→VnV^n\rightarrow V^nVn→Vn(自身)的线性变换,则取Bβ=Bα\Beta_{\beta}=\Beta_{\alpha}Bβ=Bα,此时AAA是方阵,简称为TTT在基Bα\Beta_{\alpha}Bα下的矩阵。A=[A1,A2,...,An]A=[A_1,A_2,...,A_n]A=[A1,A2,...,An]
其中AiA_iAi是TαiT\alpha_iTαi在像空间Bβ\Beta_{\beta}Bβ下的坐标。
基到基的过渡矩阵P与线性变换在基偶下的矩阵A的联系:
共同点:它们的每一列都是向量的坐标。 不同:过渡矩阵是另外一个基的每个向量在原来那个基下的坐标。线性变换原像空间里面那个基里的向量做完线性变换后在像空间这个基下的坐标。P是同一个空间下基之间坐标的关系。A是不同空间之间的。例子:

从A可以看出TTT使得向量在α1\alpha_1α1方向扩大十倍,在其他方向不变。
例子:
2)中的[1,0,0]T[1 ,0, 0]^T[1,0,0]T:取A第一列
C 零空间与值空间(1)定义3(零空间和值空间)设TTT是Vn→VmV^n\rightarrow V^mVn→Vm的线性变换,记N(T)={ξ∈Vn∣Tξ=0}N(T)=\{\xi\in V^n|T\xi=0\}N(T)={ξ∈Vn∣Tξ=0}R(T)={Tξ∈Vm∣ξ∈Vn}R(T)=\{T\xi\in V^m|\xi\in V^n\}R(T)={Tξ∈Vm∣ξ∈Vn}称N(T)N(T)N(T)为T的零空间(核)
称R(T)R(T)R(T)为T的值空间(值域)
易知,N(T)N(T)N(T)是VnV^nVn的子空间;R(T)R(T)R(T)是VmV^mVm的子空间。
(2)定义4(零度与秩)设TTT是Vn→VmV^n\rightarrow V^mVn→Vm的线性变换,记null(T)=dimN(T)null(T)=dimN(T)null(T)=dimN(T)rank(T)=dimR(T)rank(T)=dimR(T)rank(T)=dimR(T)称null(T)为null(T)为null(T)为TTT的零度,
称rank(T)rank(T)rank(T)为TTT的秩。
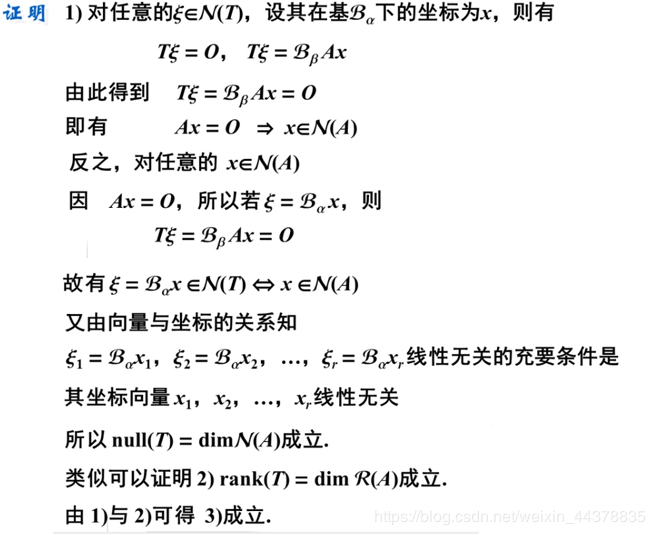
(3)定理1设TTT是Vn→VmV^n\rightarrow V^mVn→Vm的线性变换,Bα={α1,α2,...,αn}\Beta_\alpha=\{\alpha_1,\alpha_2,...,\alpha_n\}Bα={α1,α2,...,αn}与Bβ={β1,β2,...,βm}\Beta_\beta=\{\beta_1,\beta_2,...,\beta_m\}Bβ={β1,β2,...,βm}分别是VnV^nVn与VmV^mVm的基,TTT在基偶{Bα,Bβ}\{\Beta_\alpha,\Beta_\beta \}{Bα,Bβ}下的矩阵为AAA,则有:1)null(T)=diN(A)=n−rank(A)1)null(T)=diN(A)=n-rank(A)1)null(T)=diN(A)=n−rank(A) 2)rank(T)=dimR(A)=rank(A)2)rank(T)=dimR(A)=rank(A)2)rank(T)=dimR(A)=rank(A) 3)rank(T)+null(T)=n3)rank(T)+null(T)=n3)rank(T)+null(T)=n
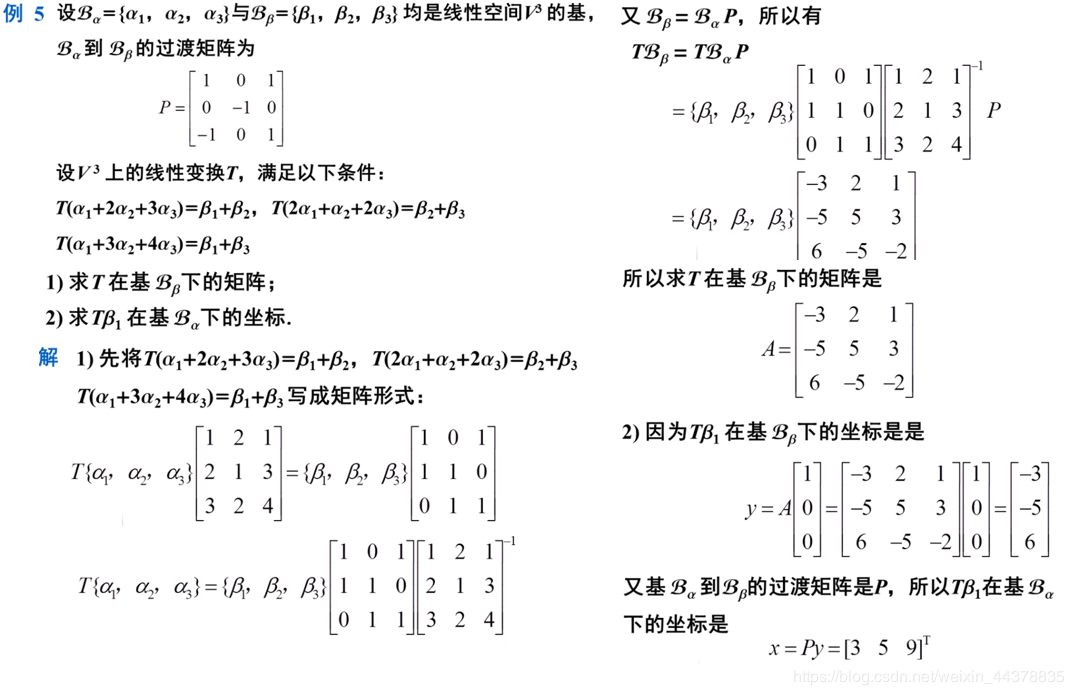
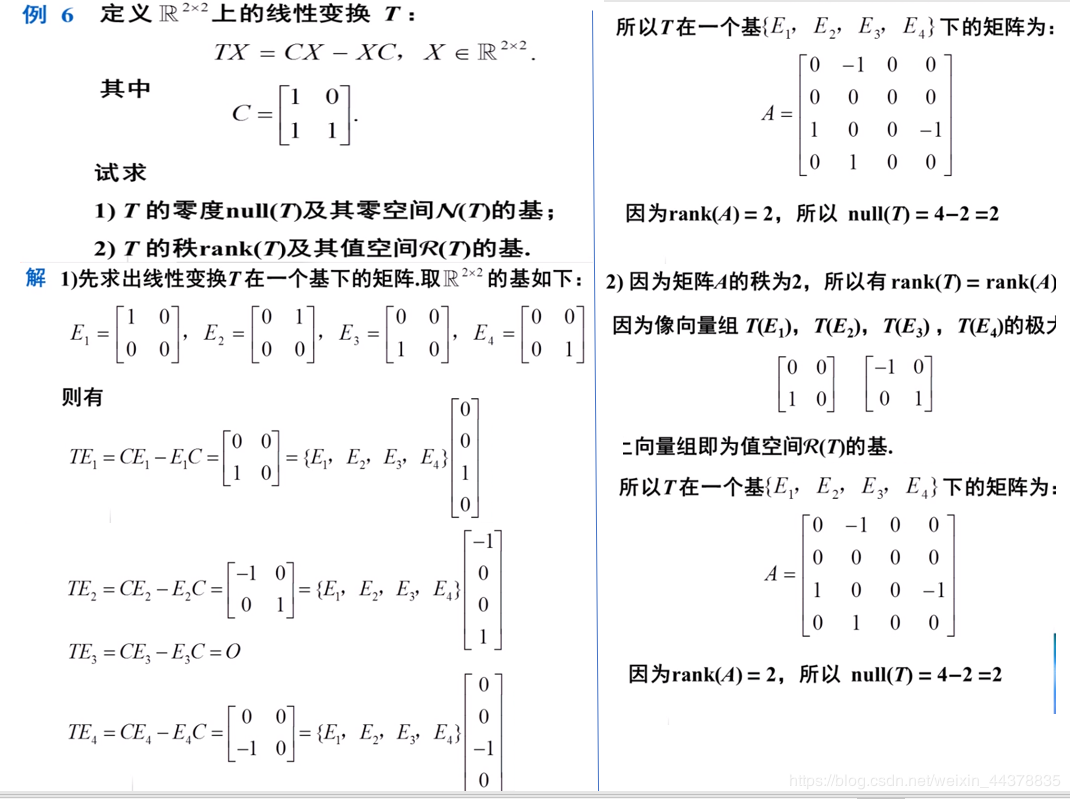
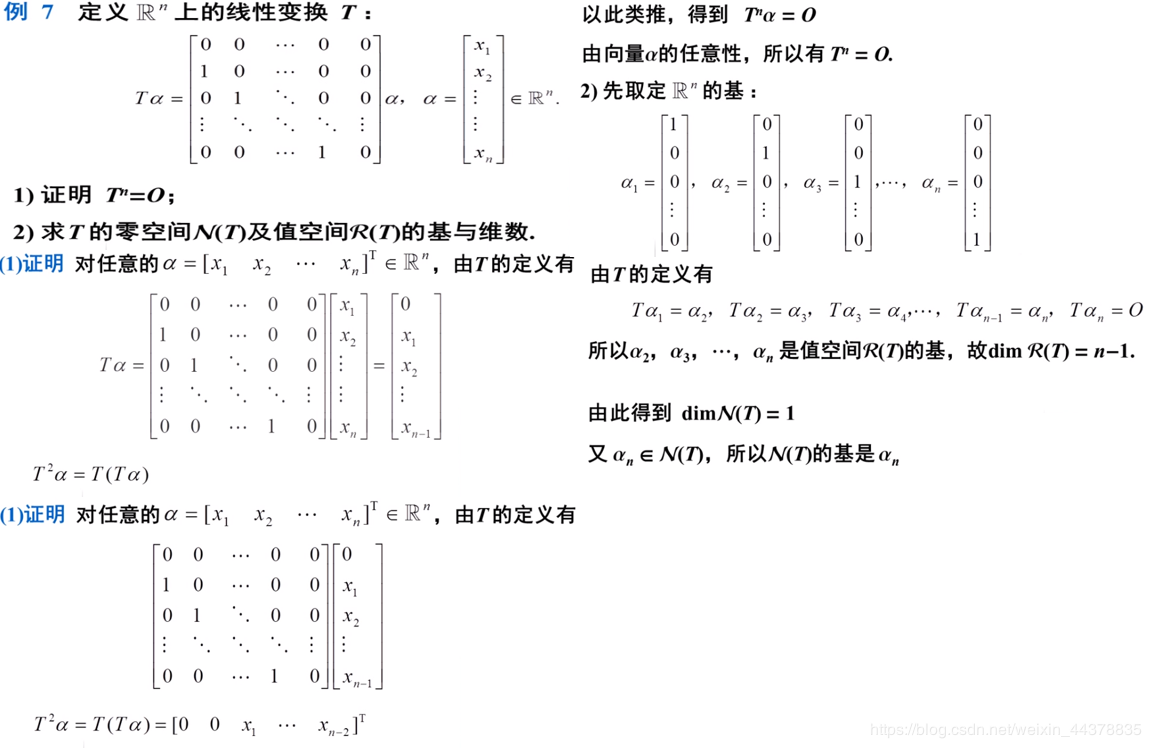
例题:
(4)求零空间N(T)N(T)N(T)与值空间R(T)R(T)R(T)的基的一般方法:
设TTT是Vn→VmV^n\rightarrow V^mVn→Vm的线性变换,Bα={α1,α2,...,αn}\Beta_\alpha=\{\alpha_1,\alpha_2,...,\alpha_n\}Bα={α1,α2,...,αn}与Bβ={β1,β2,...,βn}\Beta_\beta=\{\beta_1,\beta_2,...,\beta_n\}Bβ={β1,β2,...,βn}分别是VnV^nVn与VmV^mVm的基。
1)求零空间N(T)N(T)N(T)的基:
2)求值空间R(T)R(T)R(T)的基:
先求出基Bα\Beta_\alphaBα中向量变换后的像Tα1,Tα2,..,TαnT\alpha_1,T\alpha_2,..,T\alpha_nTα1,Tα2,..,Tαn的极大线性无关组即为R(T)的基。R(T)的基。R(T)的基。例子:
作者:有、闲