OpenCV实现相机标定
本文实例为大家分享了OpenCV实现相机标定的具体代码,供大家参考,具体内容如下
一、相机与针孔相机模型 1.相机模型现代科技加持下的相机已经成为制造精密设计巧妙的消费品,相机的光学结构也比诞生之初复杂了许多
典型单反相机光学结构:

在众多相机模型中,针孔相机又称投影相机模型是相对简单而常用的模型。简单的说,针孔相机模型就是把相机简化成单纯的小孔成像,可想而知,这种简化对于精度要求高的情况或者特殊镜头的相机是不适用的。
小孔成像原理:
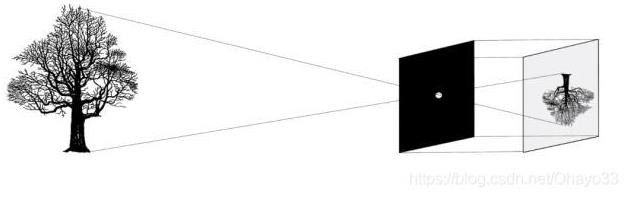
单纯的小孔成像模型中没有考虑镜头,现实条件下,由一片或多片透镜组成的镜头才能让利用了小孔成像原理的相机成像清晰的同时保持画面亮度。所以我们需要向模型引入透镜。
透镜成像原理:

但是,新的问题也随之而来:虚焦、畸变
一般我们称之为径向畸变,即光线在院里透镜中的地方比靠近中心的地方更加弯曲。径向畸变又分为中短焦距、近距离的桶形畸变和长焦距、远距离会出现的枕形畸变。
我们约定三个坐标系
1、世界坐标系矩阵:X
2、摄像机坐标系:Xc,
3、图像(像素)坐标系:x
4、相机矩阵:P
2.像平面到像素平面的投影将三维空间中一点,过该点取一平面与像素平面平行,该平面就是像平面。设该三位点P,齐次坐标为X。投影为图像点P’,平面坐标x。
针孔相机模型:
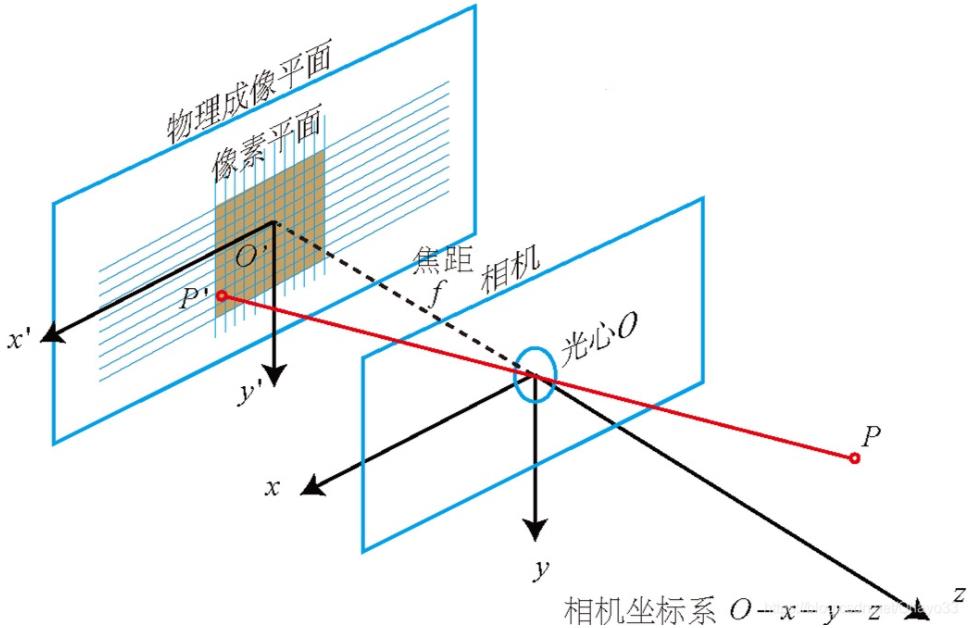
在针孔相机模型中,像素坐标和像坐标之间的关系:
λx = PX
其中,λ是三位点的逆深度。P为相机矩阵,可以分解为:
P = R[K|t]
R 是描述照相机方向的旋转矩阵,t 是描述照相机中心位置的三维平移向量,内标定矩阵K 描述照相机的投影性质。标定矩阵仅和照相机自身的情况有关,通常可以写成:
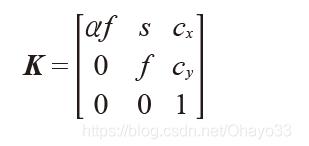
焦距f是像在平面到像素平面中心的距离。s是倾斜参数,α是纵横比例参数。
在像素数组在传感器上没有偏斜且像素是正方形的时候,可以设 s = 0,α = 1。标定矩阵可以简化为:

实验图片如下:
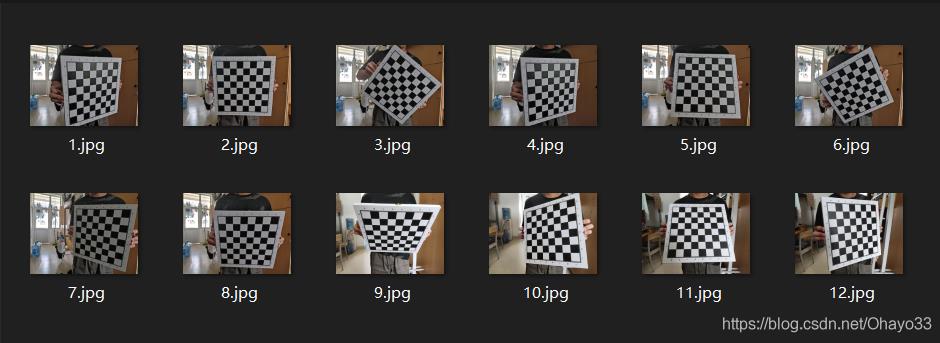
代码如下:
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
#棋盘格模板规格
w = 7 #内角点个数,内角点是和其他格子连着的点
h = 7
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
# 储存棋盘格角点的世界坐标和图像坐标对
objpoints = [] # 在世界坐标系中的三维点
imgpoints = [] # 在图像平面的二维点
images = glob.glob('picture/*.jpg')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 找到棋盘格角点
# 棋盘图像(8位灰度或彩色图像) 棋盘尺寸 存放角点的位置
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
# 如果找到足够点对,将其存储起来
if ret == True:
# 角点精确检测
# 输入图像 角点初始坐标 搜索窗口为2*winsize+1 死区 求角点的迭代终止条件
cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria)
objpoints.append(objp)
imgpoints.append(corners)
# 将角点在图像上显示
cv2.drawChessboardCorners(img, (w,h), corners, ret)
cv2.imshow('findCorners',img)
cv2.waitKey(1000)
cv2.destroyAllWindows()
#标定、去畸变
# 输入:世界坐标系里的位置 像素坐标 图像的像素尺寸大小 3*3矩阵,相机内参数矩阵 畸变矩阵
# 输出:标定结果 相机的内参数矩阵 畸变系数 旋转矩阵 平移向量
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
# mtx:内参数矩阵
# dist:畸变系数
# rvecs:旋转向量 (外参数)
# tvecs :平移向量 (外参数)
print (("ret:"),ret)
print (("mtx:\n"),mtx) # 内参数矩阵
print (("dist:\n"),dist) # 畸变系数 distortion cofficients = (k_1,k_2,p_1,p_2,k_3)
print (("rvecs:\n"),rvecs) # 旋转向量 # 外参数
print (("tvecs:\n"),tvecs) # 平移向量 # 外参数
# 去畸变
img2 = cv2.imread('picture/6.jpg')
h,w = img2.shape[:2]
# 我们已经得到了相机内参和畸变系数,在将图像去畸变之前,
# 我们还可以使用cv.getOptimalNewCameraMatrix()优化内参数和畸变系数,
# 通过设定自由自由比例因子alpha。当alpha设为0的时候,
# 将会返回一个剪裁过的将去畸变后不想要的像素去掉的内参数和畸变系数;
# 当alpha设为1的时候,将会返回一个包含额外黑色像素点的内参数和畸变系数,并返回一个ROI用于将其剪裁掉
newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数
dst = cv2.undistort(img2, mtx, dist, None, newcameramtx)
# 根据前面ROI区域裁剪图片
x,y,w,h = roi
dst = dst[y:y+h, x:x+w]
cv2.imwrite('calibresult.jpg',dst)
# 反投影误差
# 通过反投影误差,我们可以来评估结果的好坏。越接近0,说明结果越理想。
# 通过之前计算的内参数矩阵、畸变系数、旋转矩阵和平移向量,使用cv2.projectPoints()计算三维点到二维图像的投影,
# 然后计算反投影得到的点与图像上检测到的点的误差,最后计算一个对于所有标定图像的平均误差,这个值就是反投影误差。
total_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)
total_error += error
print (("total error: "), total_error/len(objpoints))