通俗易懂!视觉slam第五部分——slam数学表示二
假设我们进行了两次变换:,
和
,
,满足:

但是从 a 到 c 的变换为:

这样的形式在变换多次之后会过于复杂。因此,我们要引入齐次坐标和变换矩阵重写:
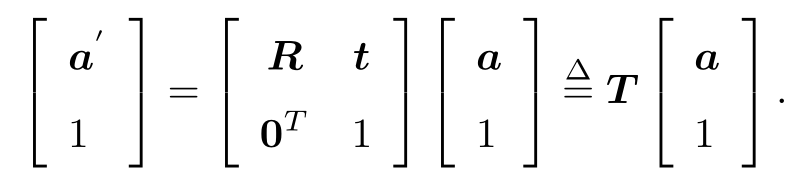
这是一个数学技巧:我们把一个三维向量的末尾添加 1,变成了四维向量,称为齐次坐标。对于这个四维向量,我们可以把旋转和平移写在一个矩阵里面,使得整个关系变成了线性关系。该式中,矩阵 T 称为变换矩阵(Transform Matrix)。我们暂时用 ˜ a 表示 a 的齐次坐标。
齐次坐标是射影几何里的概念。通过添加最后一维,我们用四个实数描述了一个三维向量,这显然多了一个自由度,但允许我们把变换写成线性的形式。在齐次坐标中,某个点 x 的每个分量同乘一个非零常数 k 后,仍然表示的是同一个点。因此,一个点的具体坐标值不是唯一的。如 [1,1,1,1] T 和 [2,2,2,2] T 是同一个点。但当最后一项不为零时,我们总可以把所有坐标除以最后一项,强制最后一项为 1,从而得到一个点唯一的坐标表示(也就是转换成非齐次坐标):

这时,忽略掉最后一项,这个点的坐标和欧氏空间就是一样的。依靠齐次坐标和变换矩阵,两次变换的累加就可以有很好的形式:

关于变换矩阵 T,它具有比较特别的结构:左上角为旋转矩阵,右侧为平移向量,左下角为 0 向量,右下角为 1。这种矩阵又称为特殊欧氏群(Special Euclidean Group):

与 SO(3) 一样,求解该矩阵的逆表示一个反向的变换
作者:cold星辰