树莓派遥控两轮小车
树莓派遥控两轮小车
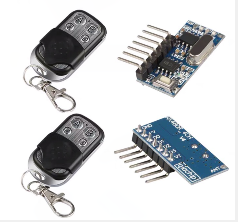
使用四按键 硬件遥控模块(按下输出高电平)
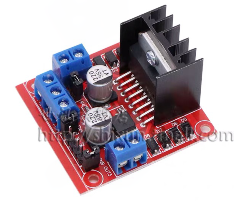
电机驱动为L298N模块
主控使用树莓派zero w(更加小巧)
电池为两节18650串联7.5V为电机模块供电,并联7805降压输出5V1.3A为树莓派、电机模块、遥控模块供电
实现4键控制启动、停止、前进、后退、左转、右转、倒车左转、倒车右转,且前进后退为双向开关
crontab -e
添加一行设置程序开机启动
@reboot python /home/pi/car_tele.py
# -*- coding: utf-8 -*-
#将RPi.GPIO 模块映射为GPIO来使用
from RPi import GPIO
#引入time模块
import time
#采用BCM引脚顺序编号
GPIO.setmode(GPIO.BCM)
#关闭警告
GPIO.setwarnings(False)
#输入IO
INPUT_PIN0 = 06
INPUT_PIN1 = 13
INPUT_PIN2 = 19
INPUT_PIN3 = 26
# 设置GPIO输入模式, 使用GPIO内置的下拉电阻, 即开关断开情况下输入为LOW,适用于高电平输入
GPIO.setup(INPUT_PIN0, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
GPIO.setup(INPUT_PIN1, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
GPIO.setup(INPUT_PIN2, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
GPIO.setup(INPUT_PIN3, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
# 设置GPIO输入模式, 使用GPIO内置的上拉电阻, 即开关断开情况下输入为HIGH,适用于接地的开关
#GPIO.setup(INPUT_PIN0, GPIO.IN, pull_up_down=GPIO.PUD_UP)
#输出IO
GPIO_PIN0 = 17
GPIO_PIN1 = 27
GPIO_PIN2 = 22
GPIO_PIN3 = 04
#配置输出IO方向
GPIO.setup(GPIO_PIN0, GPIO.OUT)
GPIO.setup(GPIO_PIN1, GPIO.OUT)
GPIO.setup(GPIO_PIN2, GPIO.OUT)
GPIO.setup(GPIO_PIN3, GPIO.OUT)
#输出IO初始化设置为低电平
GPIO.output(GPIO_PIN0, GPIO.LOW)
GPIO.output(GPIO_PIN1, GPIO.LOW)
GPIO.output(GPIO_PIN2, GPIO.LOW)
GPIO.output(GPIO_PIN3, GPIO.LOW)
# 检测输入LOW -> HIGH的变化
GPIO.add_event_detect(INPUT_PIN0, GPIO.RISING, bouncetime = 200)
GPIO.add_event_detect(INPUT_PIN1, GPIO.RISING, bouncetime = 200)
GPIO.add_event_detect(INPUT_PIN2, GPIO.RISING, bouncetime = 200)
GPIO.add_event_detect(INPUT_PIN3, GPIO.RISING, bouncetime = 200)
#按键自锁判断变量
led0Status = 0
led1Status = 0
def reset():
GPIO.output(GPIO_PIN0, GPIO.LOW)
GPIO.output(GPIO_PIN1, GPIO.LOW)
GPIO.output(GPIO_PIN2, GPIO.LOW)
GPIO.output(GPIO_PIN3, GPIO.LOW)
def forward():
global led0Status
global led1Status
if GPIO.event_detected(INPUT_PIN0):
reset()
led1Status = 0 #自锁开关切换,双向开关
led0Status = not led0Status
if led0Status:
GPIO.output(GPIO_PIN0, GPIO.HIGH)
GPIO.output(GPIO_PIN1, GPIO.HIGH)
else:
reset()
time.sleep(0.01) # 10毫秒的检测间隔
def backward():
global led0Status
global led1Status
if GPIO.event_detected(INPUT_PIN1):
reset()
led0Status = 0 #自锁开关切换,双向开关
led1Status = not led1Status
if led1Status:
GPIO.output(GPIO_PIN2, GPIO.HIGH)
GPIO.output(GPIO_PIN3, GPIO.HIGH)
else:
reset()
time.sleep(0.01) # 10毫秒的检测间隔
def left():
global led0Status
global led1Status
if led0Status == True:
while (GPIO.input(INPUT_PIN2) and led0Status == True):
reset()
GPIO.output(GPIO_PIN0, GPIO.HIGH)
else:
reset()
GPIO.output(GPIO_PIN0, GPIO.HIGH)
GPIO.output(GPIO_PIN1, GPIO.HIGH)
time.sleep(0.01) # 10毫秒的检测间隔
if led1Status == True:
while (GPIO.input(INPUT_PIN2) and led1Status == True):
reset()
GPIO.output(GPIO_PIN2, GPIO.HIGH)
else:
reset()
GPIO.output(GPIO_PIN2, GPIO.HIGH)
GPIO.output(GPIO_PIN3, GPIO.HIGH)
time.sleep(0.01) # 10毫秒的检测间隔
def right():
global led0Status
global led1Status
if led0Status == True:
while (GPIO.input(INPUT_PIN3) and led0Status == True):
reset()
GPIO.output(GPIO_PIN1, GPIO.HIGH)
else:
if led0Status == True:
reset()
GPIO.output(GPIO_PIN0, GPIO.HIGH)
GPIO.output(GPIO_PIN1, GPIO.HIGH)
time.sleep(0.01) # 10毫秒的检测间隔
if led1Status == True:
while (GPIO.input(INPUT_PIN3) and led1Status == True):
reset()
GPIO.output(GPIO_PIN3, GPIO.HIGH)
else:
if led1Status == True:
reset()
GPIO.output(GPIO_PIN2, GPIO.HIGH)
GPIO.output(GPIO_PIN3, GPIO.HIGH)
time.sleep(0.01) # 10毫秒的检测间隔
try:
while True:
if GPIO.input(INPUT_PIN0):
forward();
elif GPIO.input(INPUT_PIN1):
backward();
elif GPIO.input(INPUT_PIN2):
left();
elif GPIO.input(INPUT_PIN3):
right();
#程序中止时清理GPIO资源
except KeyboardInterrupt:
GPIO.cleanup()
print(' program stopped !')
作者:Skywin88