《Spectral Networks and Deep Locally Connected Networks on Graphs》论文理解
在欧式空间中使用的CNN卷积具有平移不变性,权值共享,局部连接,分层次表达的特点;但是图网络是一种非欧式结构的数据,网络是不规整的关系型数据,所以其不存在平移不变形(每个节点的周围邻居数不固定),导致图网络无法使用传统的CNN。不使用卷积核卷积的话,只能按照全连接网络的方式进行线性映射,这样又将失去权值共享,局部连接,分层次表达这些优势,需要大量的参数。在《Spectral Networks and Deep Locally Connected Networks on Graphs》 中,作者想办法把传统欧式空间的卷积迁移到图网络中去,作者提出了两个结构,把欧式空间的卷积迁移到了图网络的空间域和频域。
2.空间结构无向图:G=(Ω,W)G=(\Omega,W)G=(Ω,W),其中Ω\OmegaΩ表示图中所有节点的集合,size = m;WWW表示图的邻接矩阵,shape = (m,m),由于是无向图,WWW是一个对称矩阵。WWW中的值Wi,jW_{i,j}Wi,j表示节点i,j之间的边的权重,为非负值,当这两个节点之间没有边的时候,认为权重值为0。
2.1 节点的邻域在传统的欧式空间中(以图像为例),在卷积时需要设置一定大小的卷积核,如 kernel = (3,3),就是相当于中心像素点的邻域为周围的8个像素点。
在图中,利用WWW来确定每个节点的邻域。论文中给出公式:
Nδ(j)={i∈Ω:Wi,j>δ}(1)N_\delta(j)=\{i\in\Omega:W_{i,j}>\delta\}\tag{1}Nδ(j)={i∈Ω:Wi,j>δ}(1)
Nδ(j)N_\delta(j)Nδ(j)表示jjj的邻域,是一个集合;以δ\deltaδ为阈值划分节点jjj的邻域,权值大于δ\deltaδ才属于jjj的邻域。
2.3 深度局部连接网络2.2节中作者在介绍一个传统卷积的分层次表达的特点,这里就不再解释,直接进入2.3节。
在传统的欧式空间中(以图像为例),在卷积时需要设置一定大小的步长,如stride = (3,3),假设input_image.shape = (18,18),kernel = (3,3),out_image.shape = (6,6),这个操作相当于在18×18个像素点中找到了6×6个聚类中心,将其进行聚类操作,每个类中的元素为中心点的邻域元素。将每个类与卷积核对应项相乘求和,得到输出的一个像素点。
在图中,作者给出了以下(2)(3)两个公式:
Nk={Nk,i;i=1...dk−1}(2)N_{k}=\{N_{k,i};i=1...d_{k-1}\}\tag{2}Nk={Nk,i;i=1...dk−1}(2)
在公式(2)中,k表示第k个尺度,类比传统卷积,意思就是第k层卷积层,Ωk\Omega_{k}Ωk表示第k层输入的节点数目,dk−1d_{k-1}dk−1第k-1层中聚类的类数,即Ωk=dk−1\Omega_{k} = d_{k-1}Ωk=dk−1,Ωk+1=dk\Omega_{k+1}=d_{k}Ωk+1=dk表示输出的节点数目,Nk,iN_{k,i}Nk,i表示第i个节点的类,在这个公式中,作者是以每个输入节点为类中心,以节点邻域为类元素,得到了Ωk=dk−1\Omega_{k} = d_{k-1}Ωk=dk−1个类。
具体如何得到NkN_{k}Nk如上图所示:(这些公式就没怎么看懂了)
xk+1,j=Lkh(∑i=1fk−1Fk,i,jxk,j)(j=1...fk)(3)x_{k+1,j}=L_{k}h(\sum_{i=1}^{f_{k-1}}{F_{k,i,j}x_{k,j}})(j=1...f_{k})\tag{3}xk+1,j=Lkh(i=1∑fk−1Fk,i,jxk,j)(j=1...fk)(3)
在公式(3)中,fk−1f_{k-1}fk−1表示k-1层的滤波器个数,也是k层中每个节点的特征维数。xk=(xk,i;i=1...fk−1)x_{k}=(x_{k,i};i=1...f_{k-1})xk=(xk,i;i=1...fk−1),xkx_{k}xk.shape = (dk−1,fk−1d_{k-1},f_{k-1}dk−1,fk−1),表示输入数据;xk,ix_{k,i}xk,i.shape = (dk−1d_{k-1}dk−1,1),表示dk−1d_{k-1}dk−1个节点的第i个特征拼接形成的向量。Fk,i,jF_{k,i,j}Fk,i,j.shape = (dk−1,dk−1d_{k-1},d_{k-1}dk−1,dk−1),表示第k层第j个滤波器的i个值,Fk,i,jF_{k,i,j}Fk,i,j的值与NkN_{k}Nk有关,表示第k层第j个滤波器的i个特征的映射关系,x节点和y节点不是邻域关系则对应的Fk,i,j(x,y)F_{k,i,j}(x,y)Fk,i,j(x,y)的值将为0,和WWW类似。
∑i=1fk−1Fk,i,jxk,j\sum_{i=1}^{f_{k-1}}{F_{k,i,j}x_{k,j}}∑i=1fk−1Fk,i,jxk,j部分完成了卷积的工作(类比传统的卷积的话,可以认为卷积的模式选择了same,stride = 1),卷积后输出和输入节点数一样,输出(dk−1,1)(d_{k-1},1)(dk−1,1)的向量,h(∗)h(*)h(∗)为非线性激励函数,Lk(∗)L_{k}(*)Lk(∗)为池化操作,将(dk−1,1)(d_{k-1},1)(dk−1,1)的向量池化为(dk,1)(d_{k},1)(dk,1)的向量,即xk+1,j.shape=(dk,1)x_{k+1,j}.shape = (d_{k},1)xk+1,j.shape=(dk,1),然后,如果第k层有fkf_{k}fk个滤波器的话,那么第k层的输出为xk+1=(xk+1,i;i=1...fk)x_{k+1}=(x_{k+1,i};i=1...f_{k})xk+1=(xk+1,i;i=1...fk)。
图上的空间域卷积如下图所示:
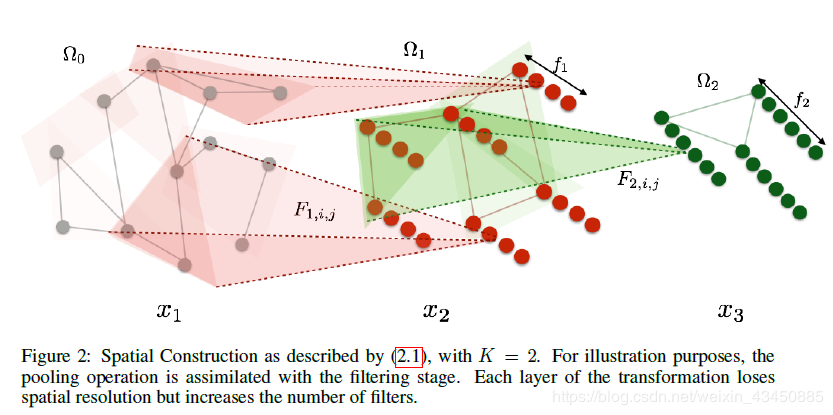
k =1时:
num(Ω0)=12,x1.shape=(12,f0),f1=4,F1,i,j.shape=(12,12),1≤i≤f0,1≤j≤f1,d1=6num(\Omega_{0})=12,x_{1}.shape=(12,f_{0}),f_{1}=4,F_{1,i,j}.shape=(12,12),1 \leq i \leq f_{0},1 \leq j \leq f_{1},d_{1}=6num(Ω0)=12,x1.shape=(12,f0),f1=4,F1,i,j.shape=(12,12),1≤i≤f0,1≤j≤f1,d1=6
k =2时:
num(Ω1)=d1=6,x2.shape=(6,f1),f2=6,F2,i,j.shape=(6,6),1≤i≤f1=4,1≤j≤f2,d2=3num(\Omega_{1})=d_{1}=6,x_{2}.shape=(6,f_{1}),f_{2}=6,F_{2,i,j}.shape=(6,6),1 \leq i \leq f_{1}=4,1 \leq j \leq f_{2},d_{2}=3num(Ω1)=d1=6,x2.shape=(6,f1),f2=6,F2,i,j.shape=(6,6),1≤i≤f1=4,1≤j≤f2,d2=3
网络输出:
x3.shape=(d2,f2)=(3,6)x_{3}.shape=(d_{2},f_{2})=(3,6)x3.shape=(d2,f2)=(3,6)
离散域的卷积公式:(f∗g)=∑τ=−∞∞f(τ)g(n−τ)(f*g)=\sum_{\tau=-\infty}^{\infty}{f(\tau)g(n-\tau)}(f∗g)=∑τ=−∞∞f(τ)g(n−τ)
离散傅里叶变换公式(DFT):X(k)=F(x(n))=∑n=0N−1x(n)e−jk2πNnX(k)=F(x(n))=\sum_{n=0}^{N-1}{x(n)e^{-jk\frac{2\pi}{N}n}}X(k)=F(x(n))=∑n=0N−1x(n)e−jkN2πn , k∈[0,N−1]k\in[0,N-1]k∈[0,N−1],表示的是x(n)x(n)x(n)与{e−jk2πNn}\{e^{-jk\frac{2\pi}{N}n}\}{e−jkN2πn}的内积,也可以认为是将x(n)x(n)x(n)映射为{e−jk2πNn}\{e^{-jk\frac{2\pi}{N}n}\}{e−jkN2πn}基向量空间的X(k)X(k)X(k)。
离散傅里叶逆变换公式(IDFT):x(n)=F−1(X(k))=1N∑k=0N−1X(k)ejk2πNnx(n) = F^{-1}(X(k))=\frac{1}{N}\sum_{k=0}^{N-1}{X(
k)e^{jk\frac{2\pi}{N}n}}x(n)=F−1(X(k))=N1∑k=0N−1X(k)ejkN2πn , n∈[0,N−1]n\in[0,N-1]n∈[0,N−1]。
由于时域卷积等于频域相乘,所以卷积公式的频域表达:
(f∗g)=F−1[F[f]⨀F[g]](4)(f*g)=F^{-1}[F[f]\bigodot F[g]]\tag{4}(f∗g)=F−1[F[f]⨀F[g]](4)
⨀\bigodot⨀表示哈达玛乘积,指的是两个矩阵(或向量)的逐点乘积。
在图网络中,定义了度矩阵DDD,DDD为对角矩阵,对角线上的值为各个节点连接的边的数目,WWW为图的邻接矩阵,图中的拉普拉斯矩阵定义为L=D−WL=D-WL=D−W,对LLL进行矩阵的特征分解,得到:L=VΛVTL=V\Lambda V^{T}L=VΛVT,V=(v1,...,vi,...vn),viV=(v_{1},...,v_{i},...v_{n}),v_{i}V=(v1,...,vi,...vn),vi是LLL的特征向量,Λ=diag(λ1...λi...λn)\Lambda=diag(\lambda_{1}...\lambda_{i}...\lambda_{n})Λ=diag(λ1...λi...λn),λi\lambda_{i}λi是LLL的特征值。所以:
Lvi=λivi(5)Lv_{i}=\lambda_{i}v_{i}\tag{5}Lvi=λivi(5)
而所有的基向量{e−jk2πNn}\{e^{-jk\frac{2\pi}{N}n}\}{e−jkN2πn}都满足亥姆霍兹方程(Helmholtz Equation):
∇2f=∂2e−jk2πNn∂n2=−(k2πN)2e−jk2πNn=−w2f(6)\nabla^{2}f=\frac{\partial^{2} e^{-jk\frac{2\pi}{N}n}}{\partial n^{2}}=-(k\frac{2\pi}{N})^{2}e^{-jk\frac{2\pi}{N}n}=-w^{2}f\tag{6}∇2f=∂n2∂2e−jkN2πn=−(kN2π)2e−jkN2πn=−w2f(6)
∇2\nabla^{2}∇2是拉普拉斯算子,e−jk2πNne^{-jk\frac{2\pi}{N}n}e−jkN2πn是拉普拉斯算子∇2\nabla^{2}∇2的特征函数,−w2-w^{2}−w2是特征函数的特征值。
将式(5)和式(6)对比,可知:e−jk2πNne^{-jk\frac{2\pi}{N}n}e−jkN2πn~viv_{i}vi,−w2-w^{2}−w2 ~ λi\lambda_{i}λi。
用fff表示时域信号,f^\hat{f}f^表示相应的频域信号,将这两个类比带入离散傅里叶变换的公式,得到:
f^(k)=∑n=0N−1f(n)e−jk2πNn=∑n=0N−1f(n)vk(n)=vkTf(7)\hat{f}(k) =\sum_{n=0}^{N-1}{f(n)e^{-jk\frac{2\pi}{N}n}}=\sum_{n=0}^{N-1}{f(n)v_{k}(n)}= v_{k}^{T}f\tag{7}f^(k)=n=0∑N−1f(n)e−jkN2πn=n=0∑N−1f(n)vk(n)=vkTf(7)
由式(7)可知:
f^=VTf(8)\hat{f}=V^{T}f\tag{8}f^=VTf(8)
将式(8)带入卷积公式得:
(g∗f)=V[VTg⨀VTf](9)(g*f)=V[V^{T}g\bigodot V^{T}f ]\tag{9}(g∗f)=V[VTg⨀VTf](9)
由于VTg=(v1Tg,...,vnTg)TV^{T}g=(v_{1}^{T}g,...,v_{n}^{T}g)^{T}VTg=(v1Tg,...,vnTg)T,所以VTg⨀VTf=diag(v1Tg,...,vnTg)VTfV^{T}g\bigodot V^{T}f=diag(v_{1}^{T}g,...,v_{n}^{T}g)V^{T}fVTg⨀VTf=diag(v1Tg,...,vnTg)VTf,令gθ=diag(v1Tg,...,vnTg)g_{\theta}=diag(v_{1}^{T}g,...,v_{n}^{T}g)gθ=diag(v1Tg,...,vnTg),所以(g∗f)(n)=VgθVTf(10)(g*f)(n)=Vg_{\theta}V^{T}f\tag{10}(g∗f)(n)=VgθVTf(10)
论文中所给的频域公式为:
xk+1,j=h(V∑i=1fk−1Fk,i,jVTxk,i)(11)x_{k+1,j}=h(V\sum_{i=1}^{f_{k-1}}{F_{k,i,j}V^{T}x_{k,i}})\tag{11}xk+1,j=h(Vi=1∑fk−1Fk,i,jVTxk,i)(11)
在式(11)中Fk,i,jF_{k,i,j}Fk,i,j就是gθg_{\theta}gθ,xk,i就是fx_{k,i}就是fxk,i就是f,fff相当于输入信号xxx的一个通道的信号。所以在每个通道求完卷积后,将结果累加,得到输出结果的一个通道的值。xk,ix_{k,i}xk,i表示第k层所有节点的第i个特征拼接形成的向量。Fk,i,jF_{k,i,j}Fk,i,j表示第k层第j个滤波器的i个值的频域表示(类比于传统卷积的第jjj个卷积核的第iii个通道),h(∗)h(*)h(∗)依然是非线性激活函数。
论文其他内容:
(1)经常情况下,V只有前d个特征向量起作用,因此取前d个特征向量,以减少参数。
(2)通过样条差值的方法,近似的求出这个操作的解,而使权值参数减少到O(1)。
(3)实验部分。
作者:monster.YC