(一)【自控原理】自动控制的一般概念
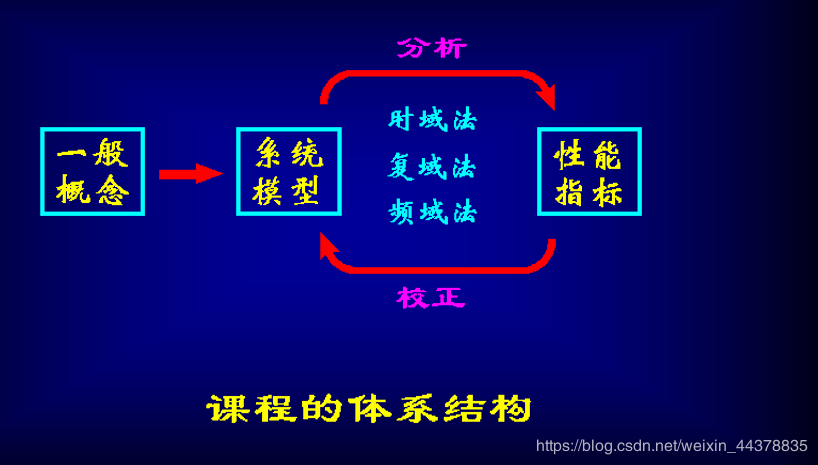
自动控制原理
无人直接参与 机器、设备或生产过程的工作状态或参数 自动实现某种规律运行。 经典控制:单输入、单输出。 现代控制:多输入、多输出 。 反馈:(控制思想的精髓,知己知彼)应用例子:
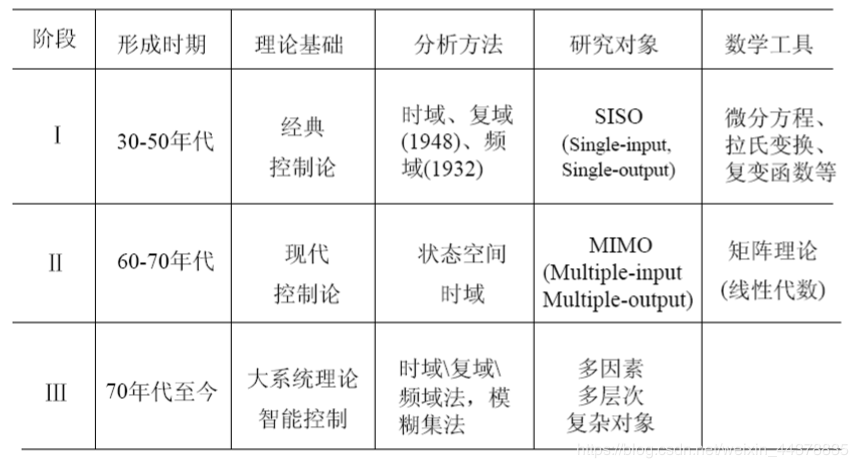
数控机床按照规定程序自动地切削工件。 化学反应炉自动地维持温度或压力的恒定。 导弹发射和制导系统自动地把导弹引向敌方目标。 人造卫星准确地进入预定轨道并回收。 自动控制原理发展概况
反馈控制(又称为闭环控制)
例子1:
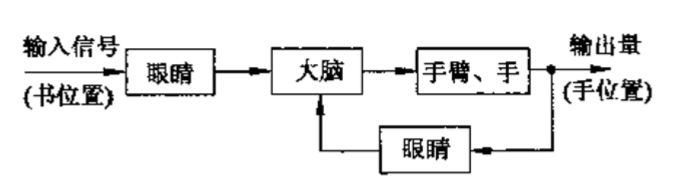
眼睛作为视觉感官看一下书在哪里并告诉大脑,大脑思考之后让手臂带动手作为执行机构去取书,然后手距离书位置情况,再眼睛反馈给大脑手与书的距离。经过多次反馈,手到达了书的位置,把书取了。
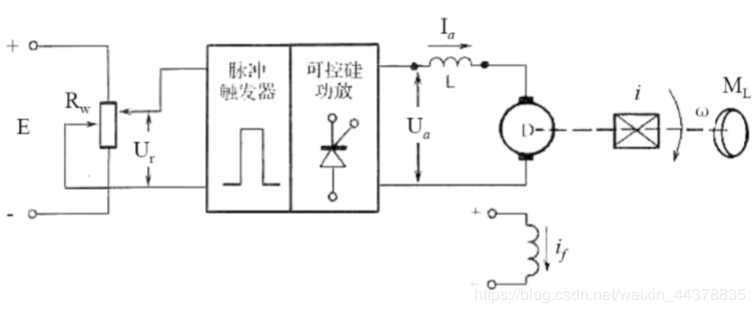
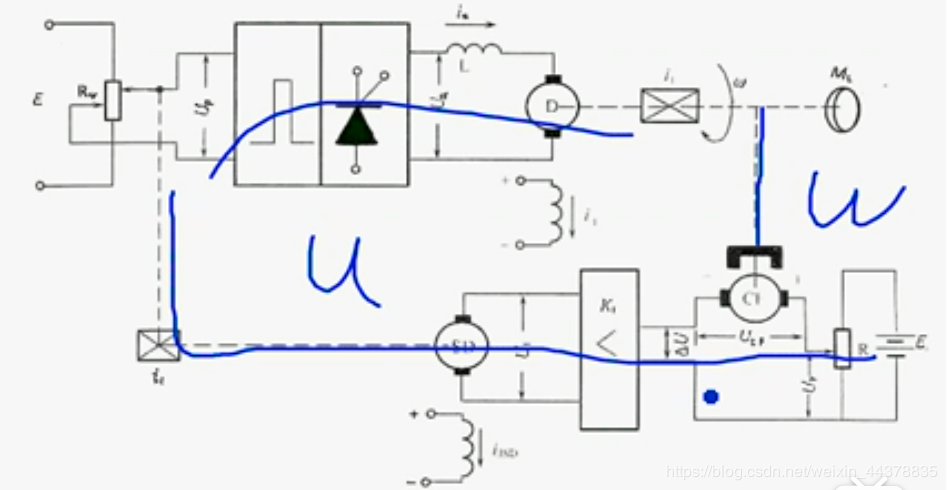
例子2:龙门刨床
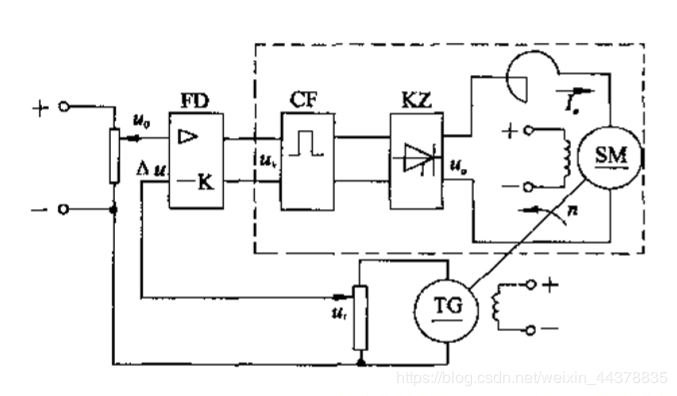
最左侧:滑动变阻器。放大器(FD)将偏差信号Δu\Delta uΔu放大,放大后,将信号传送给触发器CF,触发器输出到晶闸管KZ,KZ输出合适的电量给直流电机供电,直流电机产生转速,通过轴传递转速经过一个测速发电机TG把转速测出来,将非电信号(角速度)转化为电信号(电位差),再反馈回输入端,得到一个新的Δu\Delta uΔu。
如果负载MMM变为增大,这将导致转速nwn_wnw降低,测速发电机发出的电压utestu_testutest变小,输入端电位差Δu\Delta uΔu增大,则CE,KZ输出的电压增大,导致给电动机供电的电压usmu_{sm}usm增大。(即负载变重,转速变小,导致直流电机供电的电压增大,转速提高。)
控制系统方框图
基本控制方式
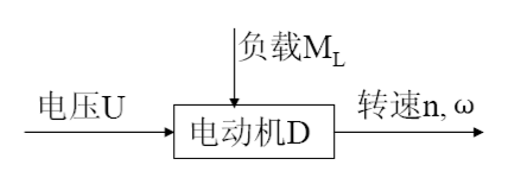
反馈控制系统:闭环控制系统 开环控制系统:按给定控制、按优化控制 复合控制系统:兼顾反馈、开环(按扰动)控制系统 电动机——电机,是自动控制系统中的常用部件。
定性的讲:
当负载变化时,要想保持转速恒定,应该怎么办?下面看一龙门刨自动调速系统。
控制方案1(开环控制控制系统):
输出量受控于输入量,而对控制量不能反施影响的一类系统。
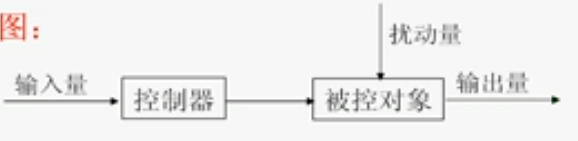 结构特征:信息单向传递,没有形成闭合回路
系统特点:控制系统结构简单,成本低廉;控制精度差,抗干扰能力差。
使用场合:多用于系统结构参数稳定和扰动信号较弱的场合。如:自动售货机,自动报警器,自动化流水线,全自动洗衣机。
龙门刨自动调速系统:
结构特征:信息单向传递,没有形成闭合回路
系统特点:控制系统结构简单,成本低廉;控制精度差,抗干扰能力差。
使用场合:多用于系统结构参数稳定和扰动信号较弱的场合。如:自动售货机,自动报警器,自动化流水线,全自动洗衣机。
龙门刨自动调速系统:
其中:
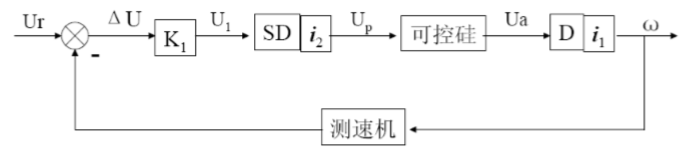
控制方案2(闭环(反馈)控制系统)
系统方框图:
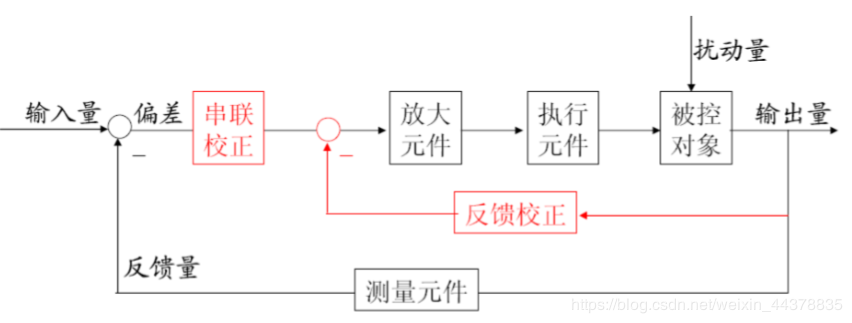
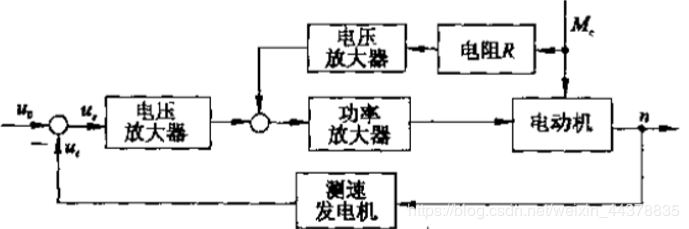
复合控制系统
系统方框图:下部的环为闭环(如果扰动产生的信号从前向通道经过测量装置反馈到前向通道上,这种封闭的取法称为闭环。)上部的环为开环(输入量为扰动量M,方向不封闭)
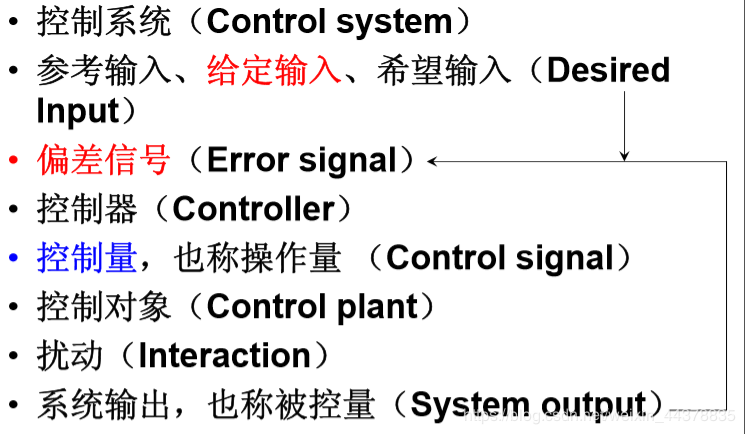
常用术语
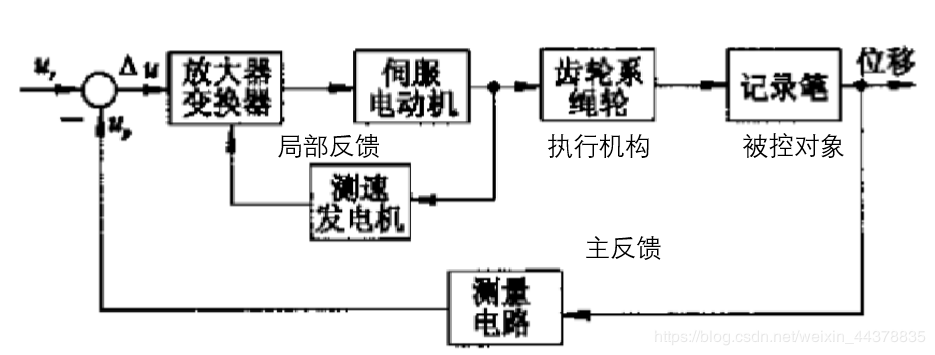
函数记录仪器原理
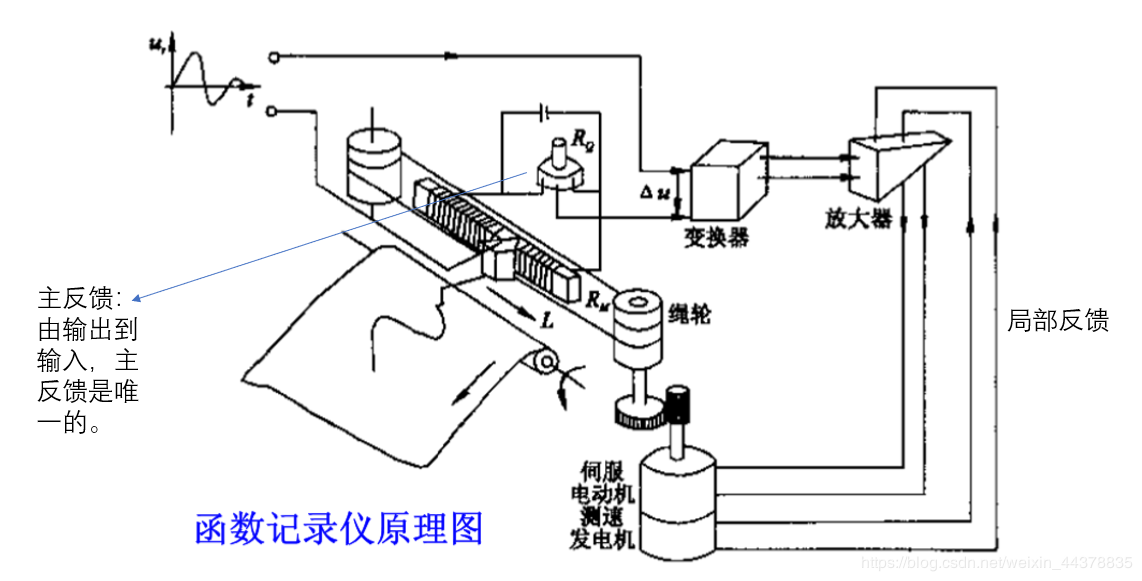
系统方框图:
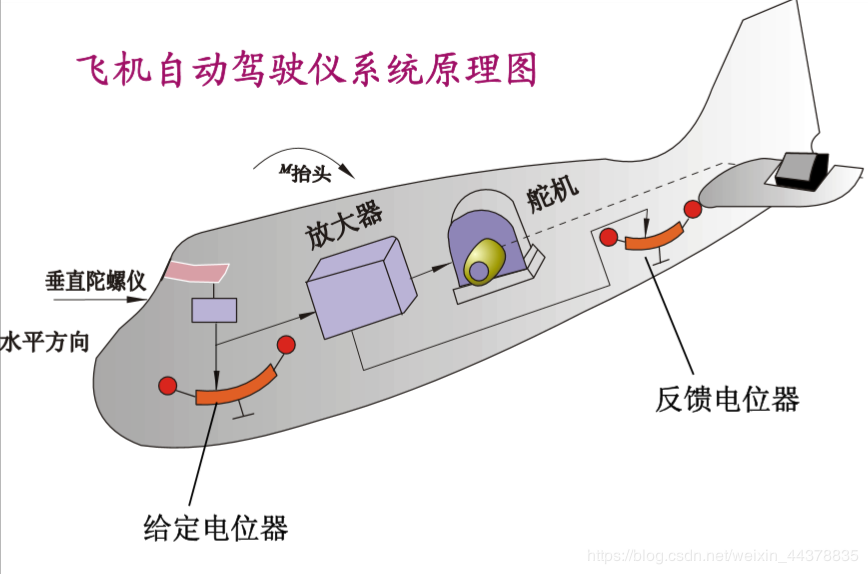
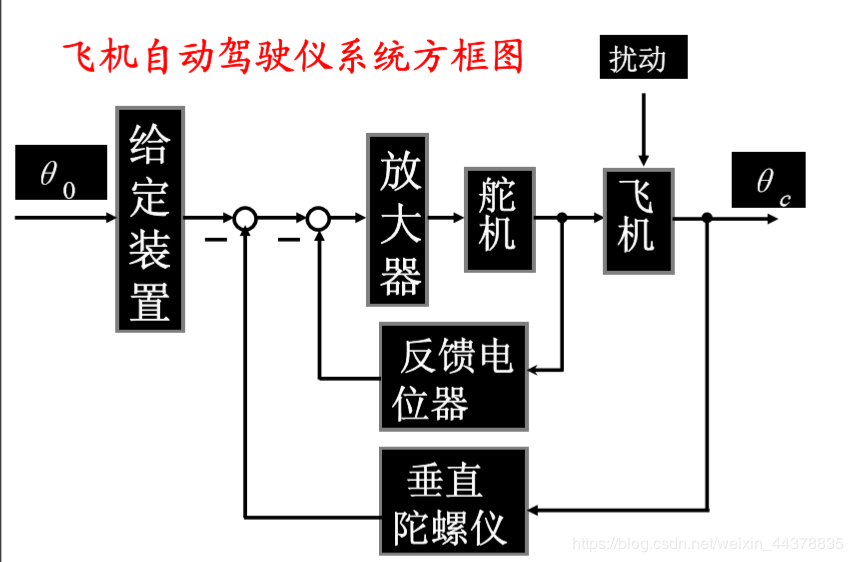
飞机自动驾驶仪器系统原理图
电阻炉温度微机控制系统
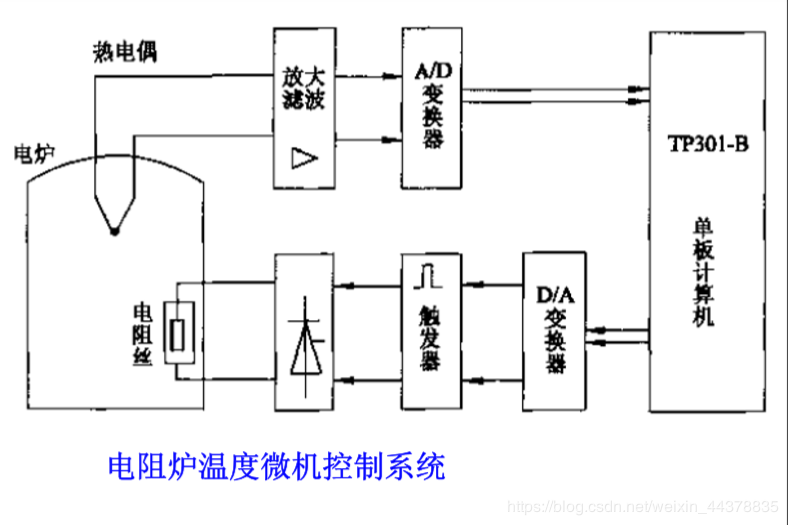
热电偶:将温度转化为电信号,温度的变化在热电偶两端产生电位差。通过发大滤波,让它驱动A/D变换器(计算机只能处理数字电信号),然后通过D/A变化器转换为模拟信号,再通过触发器,晶闸管来调节电阻丝的供电。
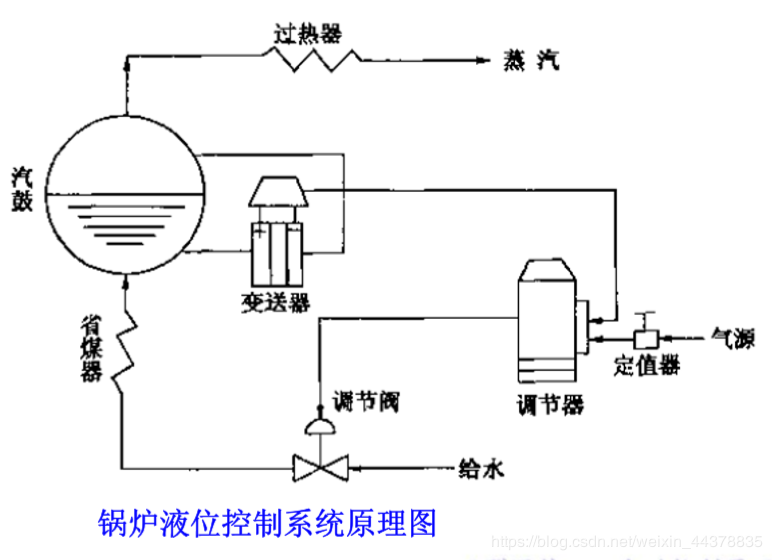
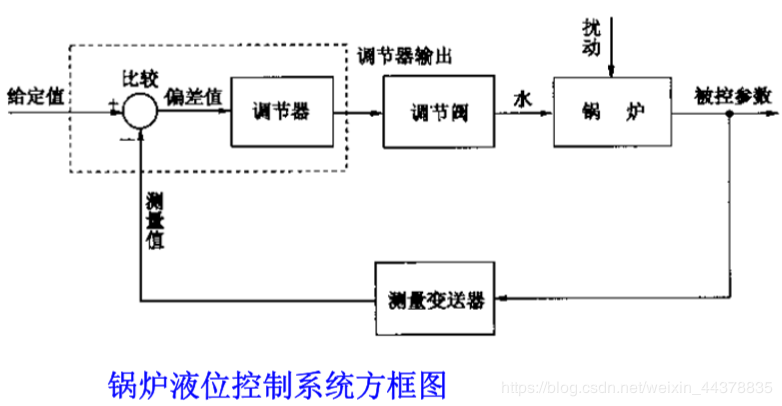
锅炉液位控制系统
a0dndtnc(t)+a1dn−1dtn−1c(t)+...+anc(t)=b0dmdtmr(t)+b1dm−1dtm−1r(t)+...+bmr(t)a_0\frac{d^n}{dt^n}c(t)+a_1\frac{d^{n-1}}{dt^{n-1}}c(t)+...+a_nc(t)=b_0\frac{d^m}{dt^m}r(t)+b_1\frac{d^{m-1}}{dt^{m-1}}r(t)+...+b_mr(t)a0dtndnc(t)+a1dtn−1dn−1c(t)+...+anc(t)=b0dtmdmr(t)+b1dtm−1dm−1r(t)+...+bmr(t)
其中:c(t)c(t)c(t)——系统输入;r(t)r(t)r(t)——系统输入
特点:
线性定常连续系统包括:
恒值控制系统(龙门刨床:恒定转速;锅炉系统:恒定温度) 随动系统,包括伺服系统(伺服系统指的是以位置作为输入) 程序控制系统(数控机床雕塑)后两种系统的被控对象一直在发生变化。随动系统的被控量是无法预知的,程序控制的则是已知的。 C.b线性定常离散控制系统
a0c(k+n)+a1c(k+n−1)+...+an−1ck+1+anc(k)=b0r(k+m)+b1r(k+m−1)+...+bm−1r(k+1)+bmr(k)(m≤n)a_0c(k+n)+a_1c(k+n-1)+...+a_{n-1}c_{k+1}+a_nc(k)\\=b_0r(k+m)+b_1r(k+m-1)+...+b_{m-1}r(k+1)+b_mr(k )\qquad (m\le n)a0c(k+n)+a1c(k+n−1)+...+an−1ck+1+anc(k)=b0r(k+m)+b1r(k+m−1)+...+bm−1r(k+1)+bmr(k)(m≤n)
r:输入采样序列;c:输出采样序列
总结:C.a、C.b线性系统具有齐次性、叠加性
C.c 非线性控制系统系数与变量有关
d2y(t)dt2+y(t)dy(t)dt+y2(t)=r(t)\frac{d^2y(t)}{dt^2}+y(t)\frac{dy(t)}{dt}+y^2(t)=r(t)dt2d2y(t)+y(t)dtdy(t)+y2(t)=r(t)
线性系统——系统中所有元件的特性都是线性的。;非线性系统.(大于等于一个元件是非线性的)
定常(时不变)系统——系统的结构和参数不随时间变化;时变系统(大于等于一个元件是时变的)
连续系统——系统中各部分信号随着时间连续变化;离散系统(大于等于一个元件是离散的)
确定性系统;不确定性系统(大于等于一个元件是不确定的) D 对自动控制系统的基本要求 稳定性:由系统结构决定,与系统输入输出无关。 快速性: 动态(暂态)特性 准确性:静态(稳态)特性
典型外作用(信号):
阶跃信号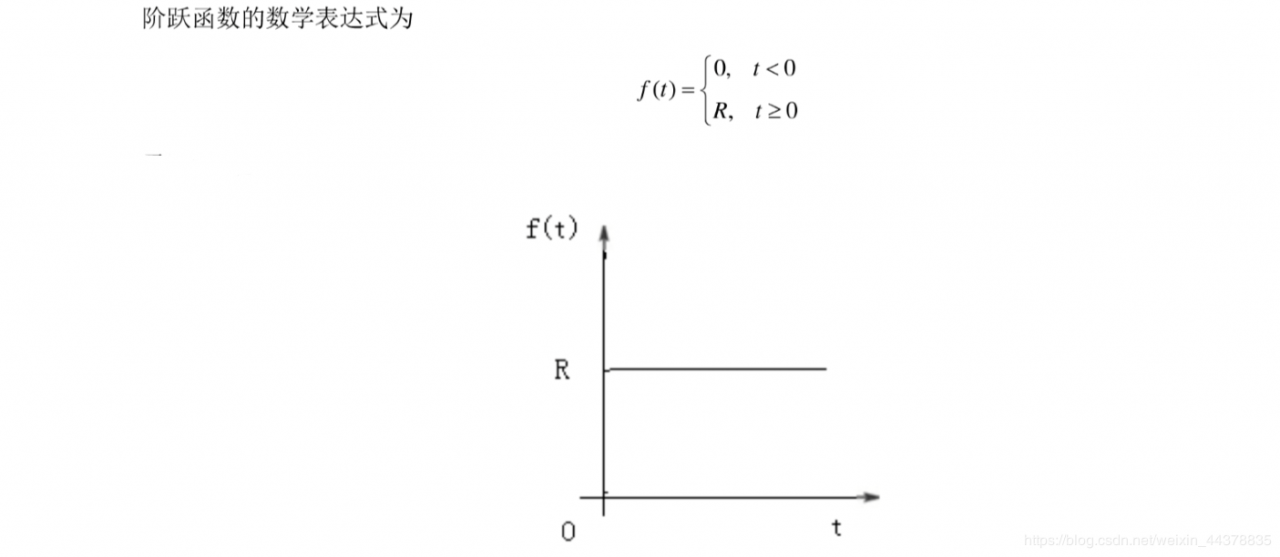
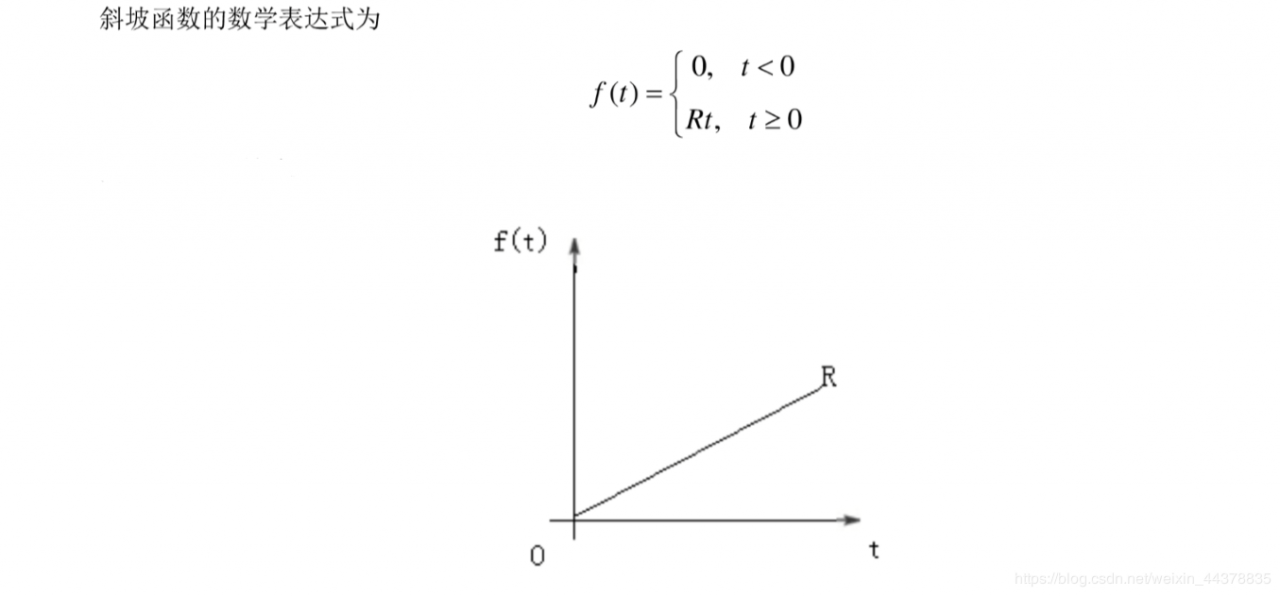
斜坡信号
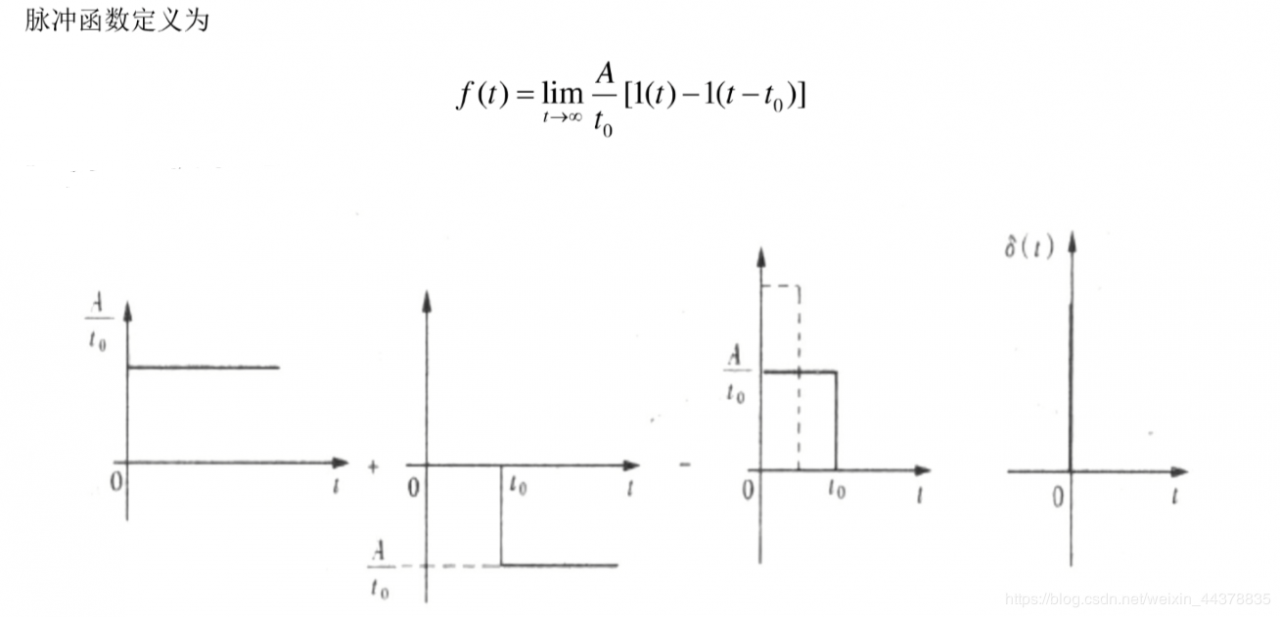
脉冲信号
正弦信号

作者:有、闲