ros机器人路径远离障碍物的方法
ros机器人路径远离障碍物的方法
作者:-点灯-
A星或dijkstra规划的路径会贴着障碍物,如果膨胀半径设置过小机器人在跟踪路径运动时会碰到障碍物,特别是在转弯的时候。
这里提供一种路径优化的方法让路径与膨胀层保持一定距离。
步骤:
1、遍历所有的路径点,记录下路径点周围一定范围length(可设置)的障碍物。
2、若所有的障碍物都在路径的同一测则找到距离该路径点A最近的障碍物点B,设最近的距离为d。
3、将路径点A平移,平移的方向为A指向B的方向,平移的距离为length - d,即让A与B的保持距离为length。
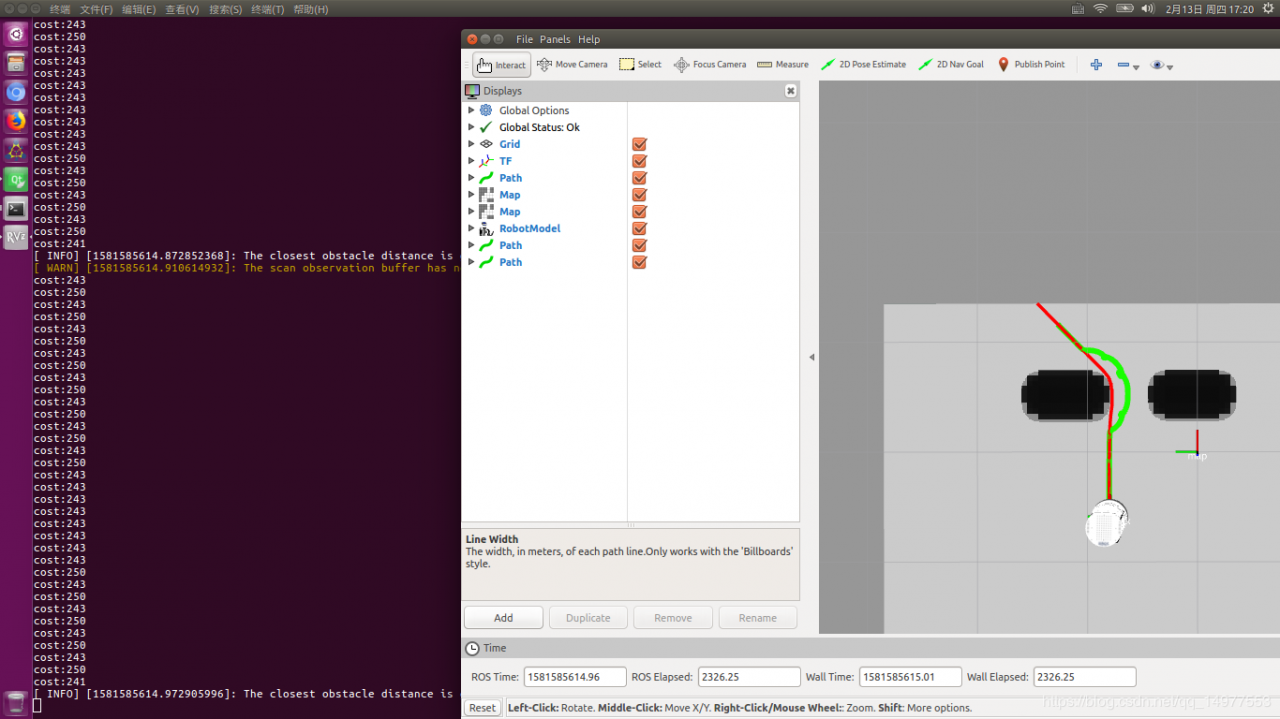
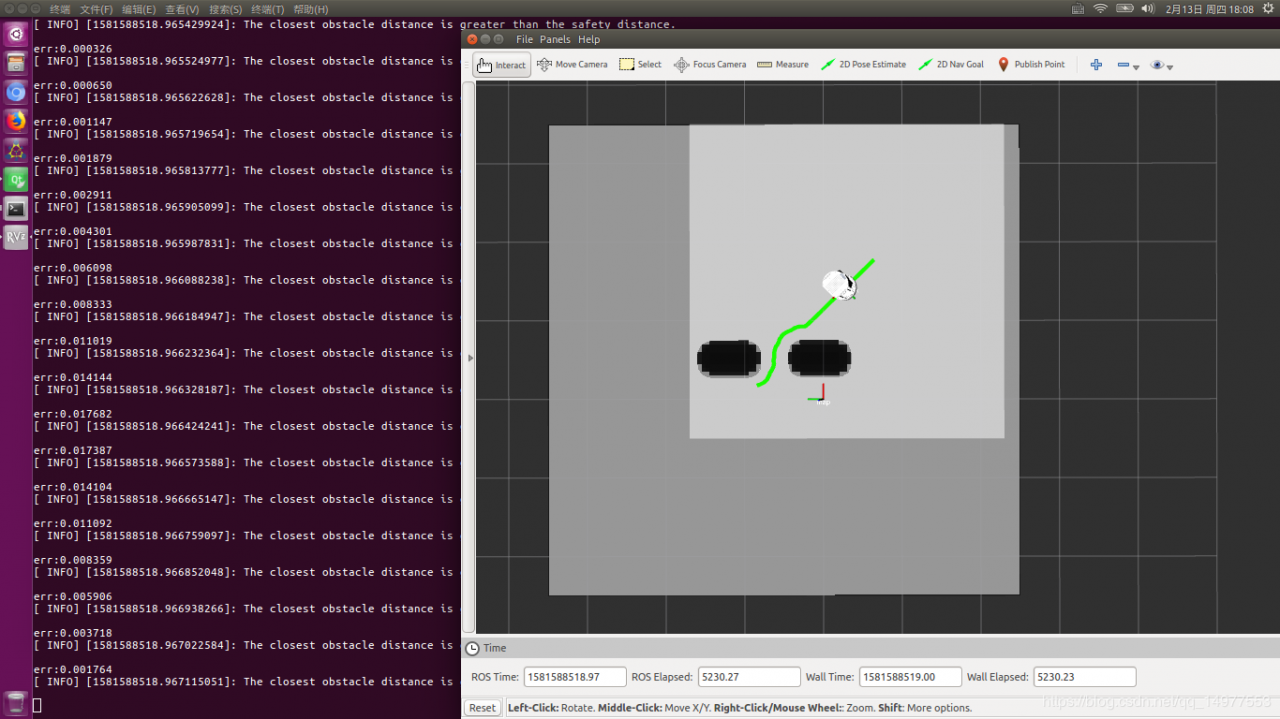
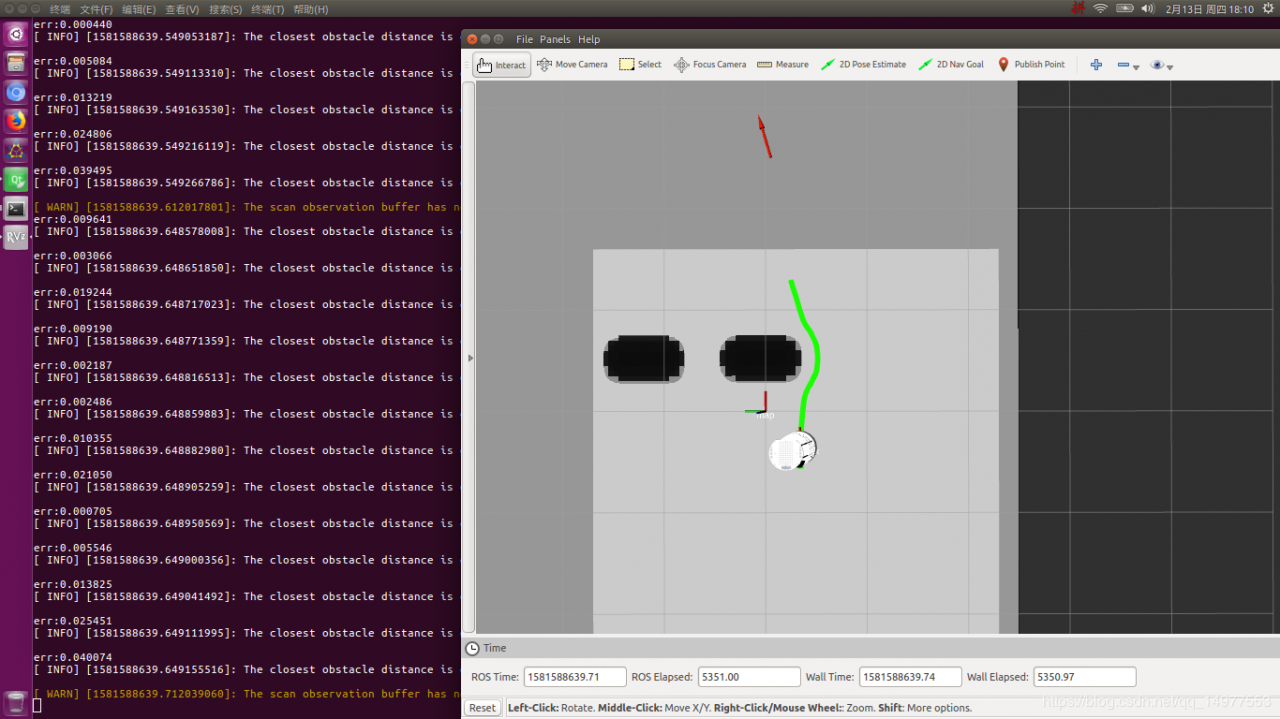
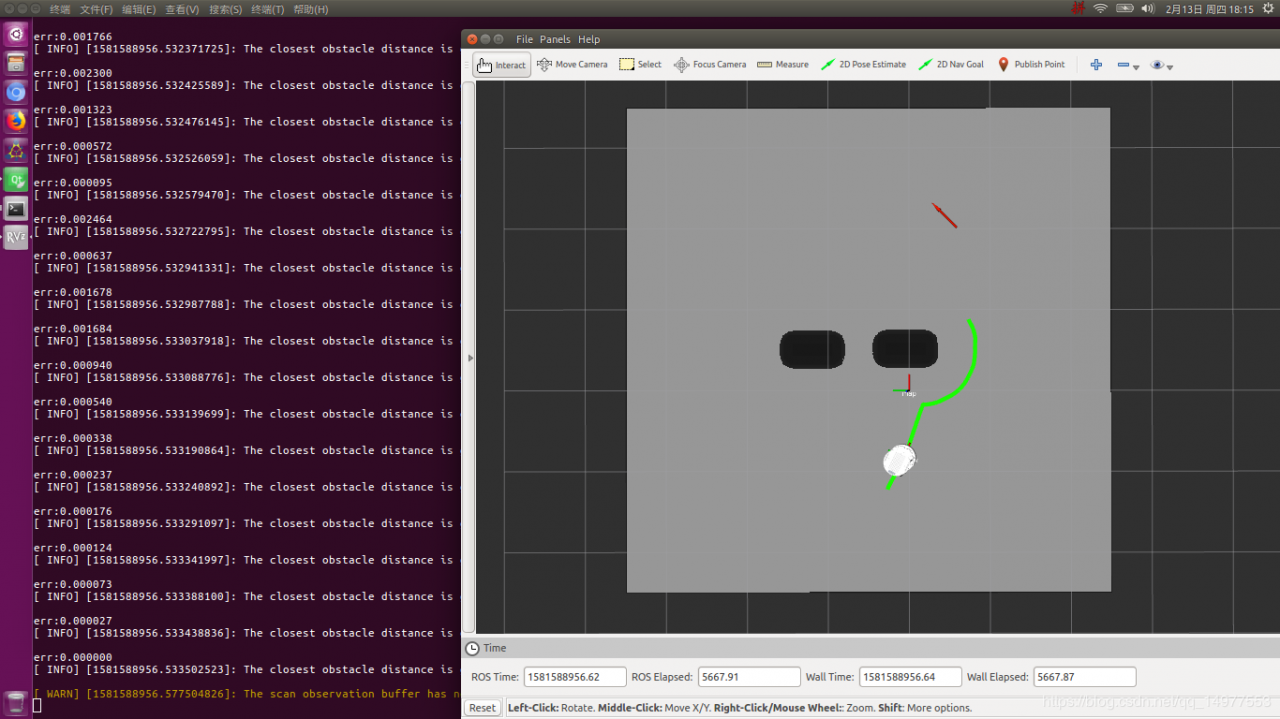
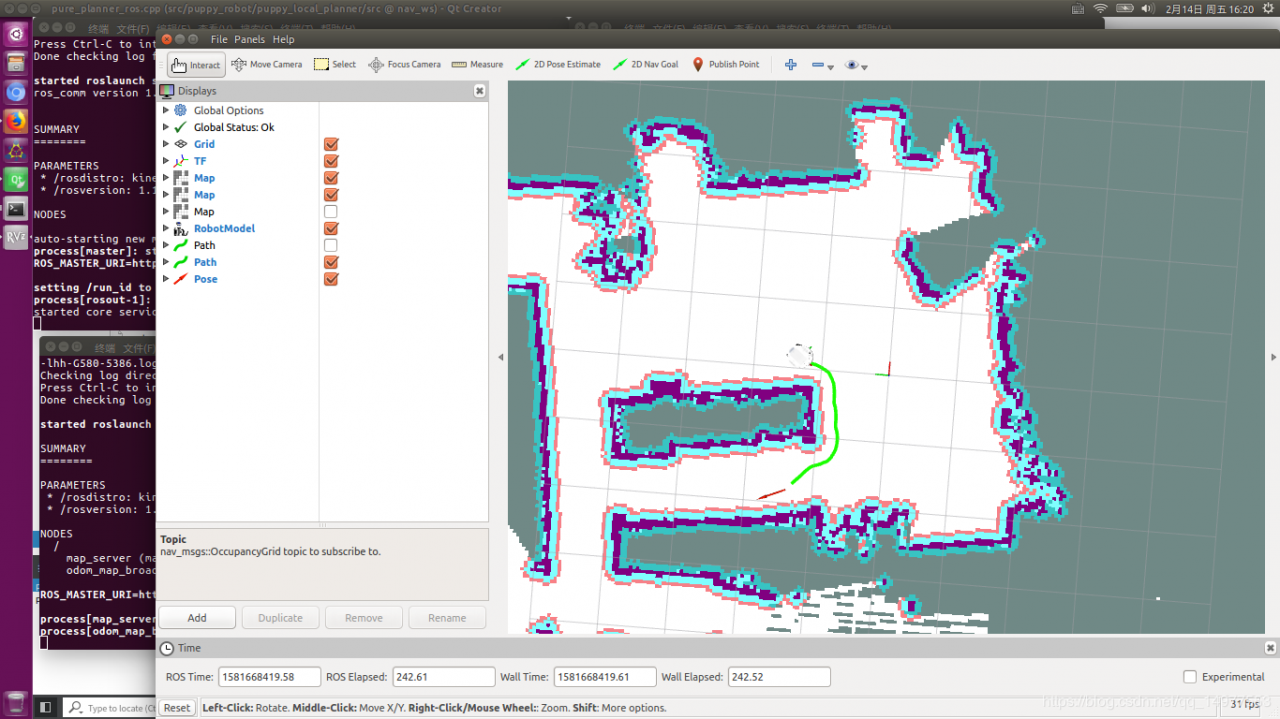
效果图如下:
红色的路径为未优化的全局路径,绿色的为优化后的局部路径
代码如下:
void filtePath(std::vector &plan,double safe_distance)
{
if(plan.empty())
{
ROS_INFO("PurePlannerROS::filtePath: plan is empty.");
return;
}
int safe_cell = (int)( safe_distance / this->costmap_->getResolution() );
if(safe_cell < 1)
{
ROS_INFO("The safety distance is too small.");
return;
}
size_t point_size = plan.size();
geometry_msgs::PoseStamped tem_point;
geometry_msgs::PoseStamped before_point;
geometry_msgs::PoseStamped next_point;
geometry_msgs::PoseStamped nearest_obstacle;
unsigned int mx_min,mx_max,my_min,my_max,mx,my;
for(size_t i=0;i0?plan[i-1]:plan[i];
next_point = icostmap_->worldToMap(tem_point.pose.position.x,tem_point.pose.position.y,mx,my);
mx_min = mx>safe_cell?mx-safe_cell:mx;
mx_max = mx+safe_cellcostmap_->getSizeInCellsX()?mx+safe_cell:mx;
my_min = my>safe_cell?my-safe_cell:my;
my_max = my+safe_cellcostmap_->getSizeInCellsY()?my+safe_cell:my;
std::vector obstacle_vec;
geometry_msgs::Point obstacle;
obstacle_vec.clear();
for(unsigned int j=mx_min;j<mx_max;j++) //Find all obstacles within a safe distance.
{
for(unsigned int k=my_min;kcostmap_->getCost(j,k) != costmap_2d::FREE_SPACE)
{
this->costmap_->mapToWorld(j,k,obstacle.x,obstacle.y);
obstacle_vec.push_back(obstacle);
}
}
}
if(obstacle_vec.empty() != true)
{
//Check if the points are on the same side.
bool same_side_flag = false;
if(next_point.pose.position.x != before_point.pose.position.x)
{
double lk = 0,lb = 0,ly = 0,num = 0;
lk = (next_point.pose.position.y-before_point.pose.position.y) / (next_point.pose.position.x-before_point.pose.position.x);
lb = next_point.pose.position.y - lk * next_point.pose.position.x;
for(size_t m=0;m<obstacle_vec.size();m++)
{
ly = lk * obstacle_vec[m].x + lb;
if(ly != 0)
break;
}
for(size_t m=0;m<obstacle_vec.size();m++)
{
num = ly*(lk * obstacle_vec[m].x + lb);
if(num < 0)
{
same_side_flag = true;
break;
}
}
}
else
{
double const_x = next_point.pose.position.x;
double err = 0,num = 0;
for(size_t m=0;m<obstacle_vec.size();m++)
{
err = const_x - obstacle_vec[m].x;
if(err != 0)
break;
}
for(size_t m=0;m<obstacle_vec.size();m++)
{
num = err*(const_x - obstacle_vec[m].x);
if(num < 0)
{
same_side_flag = true;
break;
}
}
}
if(same_side_flag == true)
{
ROS_INFO("These points are not on the same side.");
continue;
}
double distance=0,min_distance_obst = 1000.0;
size_t min_obst_index = 0;
double diff_x,diff_y;
for(size_t l=0;l distance)
{
min_distance_obst = distance;
min_obst_index = l;
}
}
if(safe_distance - min_distance_obst costmap_->worldToMap(finally_x,finally_y,mx,my);
if(this->costmap_->getCost(mx,my) == costmap_2d::FREE_SPACE)
{
plan[i].pose.position.x = finally_x;
plan[i].pose.position.y = finally_y;
}
}
}
}
作者:-点灯-
相关文章
Serwa
2020-03-20
Elizabeth
2020-01-29
Ophelia
2021-04-12
Rae
2023-07-22
Rhoda
2023-07-22
Hester
2023-07-22
Grace
2023-07-22
Vanna
2023-07-22
Peony
2023-07-22
Dorothy
2023-07-22
Dulcea
2023-07-22
Zandra
2023-07-22
Serafina
2023-07-24
Kathy
2023-08-08
Olivia
2023-08-08
Elina
2023-08-08
Jacinthe
2023-08-08
Viridis
2023-08-08
Hana
2023-08-08
Cybill
2023-08-08