Python人工智能之混合高斯模型运动目标检测详解分析
【人工智能项目】混合高斯模型运动目标检测
本次工作主要对视频中运动中的人或物的边缘背景进行检测。
那么走起来瓷!!!
import cv2
import numpy as np
# 高斯算法
class gaussian:
def __init__(self):
self.mean = np.zeros((1, 3))
self.covariance = 0
self.weight = 0;
self.Next = None
self.Previous = None
class Node:
def __init__(self):
self.pixel_s = None
self.pixel_r = None
self.no_of_components = 0
self.Next = None
class Node1:
def __init__(self):
self.gauss = None
self.no_of_comp = 0
self.Next = None
covariance0 = 11.0
def Create_gaussian(info1, info2, info3):
ptr = gaussian()
if (ptr is not None):
ptr.mean[1, 1] = info1
ptr.mean[1, 2] = info2
ptr.mean[1, 3] = info3
ptr.covariance = covariance0
ptr.weight = 0.002
ptr.Next = None
ptr.Previous = None
return ptr
def Create_Node(info1, info2, info3):
N_ptr = Node()
if (N_ptr is not None):
N_ptr.Next = None
N_ptr.no_of_components = 1
N_ptr.pixel_s = N_ptr.pixel_r = Create_gaussian(info1, info2, info3)
return N_ptr
List_node = []
def Insert_End_Node(n):
List_node.append(n)
List_gaussian = []
def Insert_End_gaussian(n):
List_gaussian.append(n)
def Delete_gaussian(n):
List_gaussian.remove(n);
class Process:
def __init__(self, alpha, firstFrame):
self.alpha = alpha
self.background = firstFrame
def get_value(self, frame):
self.background = frame * self.alpha + self.background * (1 - self.alpha)
return cv2.absdiff(self.background.astype(np.uint8), frame)
def denoise(frame):
frame = cv2.medianBlur(frame, 5)
frame = cv2.GaussianBlur(frame, (5, 5), 0)
return frame
capture = cv2.VideoCapture('1.mp4')
ret, orig_frame = capture.read( )
if ret is True:
value1 = Process(0.1, denoise(orig_frame))
run = True
else:
run = False
while (run):
ret, frame = capture.read()
value = False;
if ret is True:
cv2.imshow('input', denoise(frame))
grayscale = value1.get_value(denoise(frame))
ret, mask = cv2.threshold(grayscale, 15, 255, cv2.THRESH_BINARY)
cv2.imshow('mask', mask)
key = cv2.waitKey(10) & 0xFF
else:
break
if key == 27:
break
if value == True:
orig_frame = cv2.resize(orig_frame, (340, 260), interpolation=cv2.INTER_CUBIC)
orig_frame = cv2.cvtColor(orig_frame, cv2.COLOR_BGR2GRAY)
orig_image_row = len(orig_frame)
orig_image_col = orig_frame[0]
bin_frame = np.zeros((orig_image_row, orig_image_col))
value = []
for i in range(0, orig_image_row):
for j in range(0, orig_image_col):
N_ptr = Create_Node(orig_frame[i][0], orig_frame[i][1], orig_frame[i][2])
if N_ptr is not None:
N_ptr.pixel_s.weight = 1.0
Insert_End_Node(N_ptr)
else:
print("error")
exit(0)
nL = orig_image_row
nC = orig_image_col
dell = np.array((1, 3));
mal_dist = 0.0;
temp_cov = 0.0;
alpha = 0.002;
cT = 0.05;
cf = 0.1;
cfbar = 1.0 - cf;
alpha_bar = 1.0 - alpha;
prune = -alpha * cT;
cthr = 0.00001;
var = 0.0
muG = 0.0;
muR = 0.0;
muB = 0.0;
dR = 0.0;
dB = 0.0;
dG = 0.0;
rval = 0.0;
gval = 0.0;
bval = 0.0;
while (1):
duration3 = 0.0;
count = 0;
count1 = 0;
List_node1 = List_node;
counter = 0;
duration = cv2.getTickCount( );
for i in range(0, nL):
r_ptr = orig_frame[i]
b_ptr = bin_frame[i]
for j in range(0, nC):
sum = 0.0;
sum1 = 0.0;
close = False;
background = 0;
rval = r_ptr[0][0];
gval = r_ptr[0][0];
bval = r_ptr[0][0];
start = List_node1[counter].pixel_s;
rear = List_node1[counter].pixel_r;
ptr = start;
temp_ptr = None;
if (List_node1[counter].no_of_component > 4):
Delete_gaussian(rear);
List_node1[counter].no_of_component = List_node1[counter].no_of_component - 1;
for k in range(0, List_node1[counter].no_of_component):
weight = List_node1[counter].weight;
mult = alpha / weight;
weight = weight * alpha_bar + prune;
if (close == False):
muR = ptr.mean[0];
muG = ptr.mean[1];
muB = ptr.mean[2];
dR = rval - muR;
dG = gval - muG;
dB = bval - muB;
var = ptr.covariance;
mal_dist = (dR * dR + dG * dG + dB * dB);
if ((sum < cfbar) and (mal_dist < 16.0 * var * var)):
background = 255;
if (mal_dist < (9.0 * var * var)):
weight = weight + alpha;
if mult < 20.0 * alpha:
mult = mult;
else:
mult = 20.0 * alpha;
close = True;
ptr.mean[0] = muR + mult * dR;
ptr.mean[1] = muG + mult * dG;
ptr.mean[2] = muB + mult * dB;
temp_cov = var + mult * (mal_dist - var);
if temp_cov < 5.0:
ptr.covariance = 5.0
else:
if (temp_cov > 20.0):
ptr.covariance = 20.0
else:
ptr.covariance = temp_cov;
temp_ptr = ptr;
if (weight < -prune):
ptr = Delete_gaussian(ptr);
weight = 0;
List_node1[counter].no_of_component = List_node1[counter].no_of_component - 1;
else:
sum += weight;
ptr.weight = weight;
ptr = ptr.Next;
if (close == False):
ptr = gaussian( );
ptr.weight = alpha;
ptr.mean[0] = rval;
ptr.mean[1] = gval;
ptr.mean[2] = bval;
ptr.covariance = covariance0;
ptr.Next = None;
ptr.Previous = None;
Insert_End_gaussian(ptr);
List_gaussian.append(ptr);
temp_ptr = ptr;
List_node1[counter].no_of_components = List_node1[counter].no_of_components + 1;
ptr = start;
while (ptr != None):
ptr.weight = ptr.weight / sum;
ptr = ptr.Next;
while (temp_ptr != None and temp_ptr.Previous != None):
if (temp_ptr.weight <= temp_ptr.Previous.weight):
break;
else:
next = temp_ptr.Next;
previous = temp_ptr.Previous;
if (start == previous):
start = temp_ptr;
previous.Next = next;
temp_ptr.Previous = previous.Previous;
temp_ptr.Next = previous;
if (previous.Previous != None):
previous.Previous.Next = temp_ptr;
if (next != None):
next.Previous = previous;
else:
rear = previous;
previous.Previous = temp_ptr;
temp_ptr = temp_ptr.Previous;
List_node1[counter].pixel_s = start;
List_node1[counter].pixel_r = rear;
counter = counter + 1;
capture.release()
cv2.destroyAllWindows()
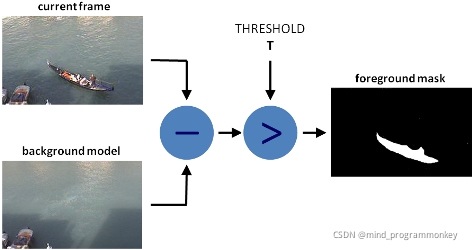
背景减法 (BS) 是一种常用且广泛使用的技术,用于通过使用静态相机生成前景蒙版(即,包含属于场景中运动物体的像素的二值图像)。
顾名思义,BS 计算前景蒙版,在当前帧和背景模型之间执行减法运算,其中包含场景的静态部分,或者更一般地说,根据观察到的场景的特征,可以将所有内容视为背景。
背景建模包括两个主要步骤:
后台初始化;
背景更新。
在第一步中,计算背景的初始模型,而在第二步中,更新该模型以适应场景中可能的变化。
import cv2
#构造VideoCapture对象
cap = cv2.VideoCapture('1.mp4')
# 创建一个背景分割器
# createBackgroundSubtractorMOG2()函数里,可以指定detectShadows的值
# detectShadows=True,表示检测阴影,反之不检测阴影。默认是true
fgbg = cv2.createBackgroundSubtractorMOG2()
while True :
ret, frame = cap.read() # 读取视频
fgmask = fgbg.apply(frame) # 背景分割
cv2.imshow('frame', fgmask) # 显示分割结果
if cv2.waitKey(100) & 0xff == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
点赞评论走起来,瓷们!!!

到此这篇关于Python人工智能之混合高斯模型运动目标检测详解分析的文章就介绍到这了,更多相关Python 高斯模型运动目标检测内容请搜索软件开发网以前的文章或继续浏览下面的相关文章希望大家以后多多支持软件开发网!