将xacro文件转化为URDF文件并在一致性上检查生成的URDF文件,显示连杆树并以图形方式进行可视化
记录学习ROS的经验
xacro 是 URDF 的升级版,易于修改机器人模型参数,生成xacro文件后进行检查分为如下几步
1 . cd 至 xacro 文件所在目录
例:cd ~/catkin_ws1/src/my_robot_description/urdf
2 . 分别执行如下命令
rosrun xacro xacro --inorder filename.xacro
例:
 显示如下部分结果
显示如下部分结果

rosrun xacro xacro --check-order filename.xacro
例:
 显示如下结果
显示如下结果

[注] 两行命令若执行结果相同,则xacro文件一致性相同
rosrun xacro xacro filename.xacro > filename_new.urdf
即可在 catkin_ws1/src/my_robot_description/urdf路径下
生成filename_new.urdf,
文件名自定义
例:rosrun xacro xacro --inorder mobot.xacro > mobot.urdf

4 . 执行以下命令
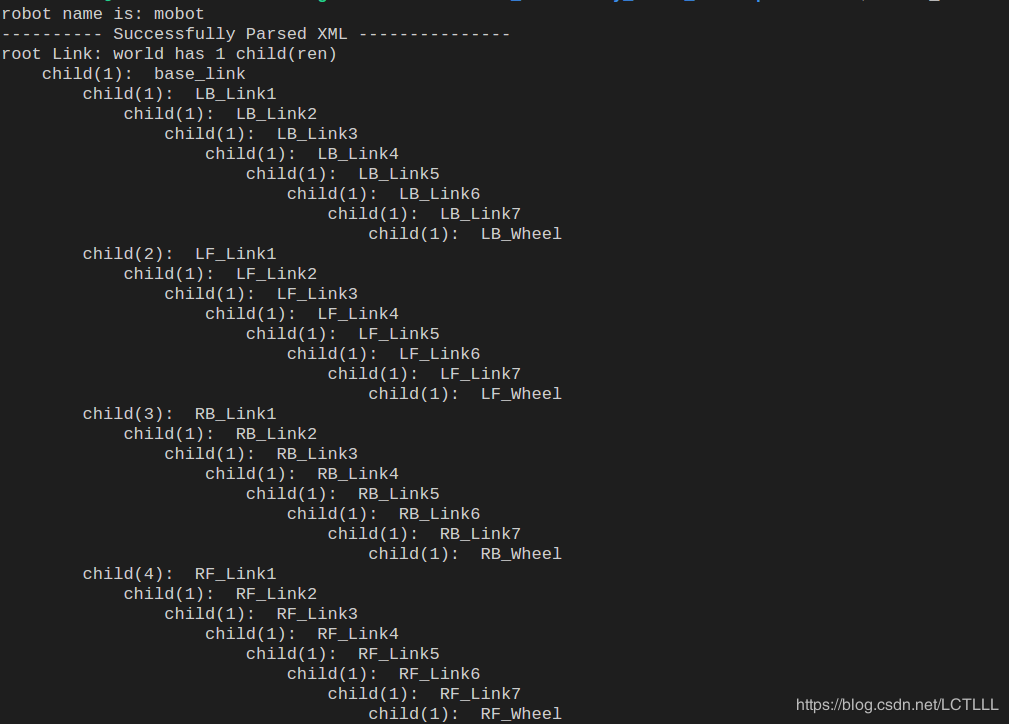
check_urdf filename_new.urdf
例:

显示如下连杆树
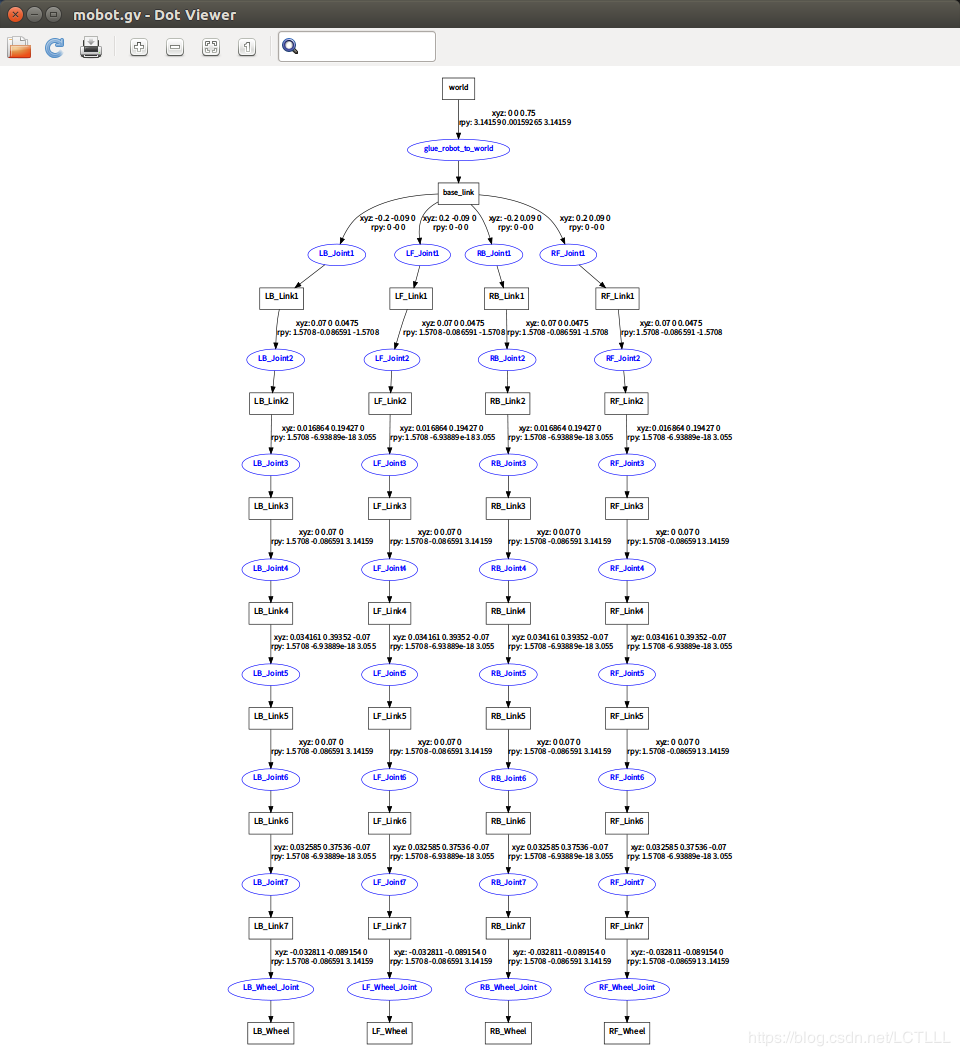
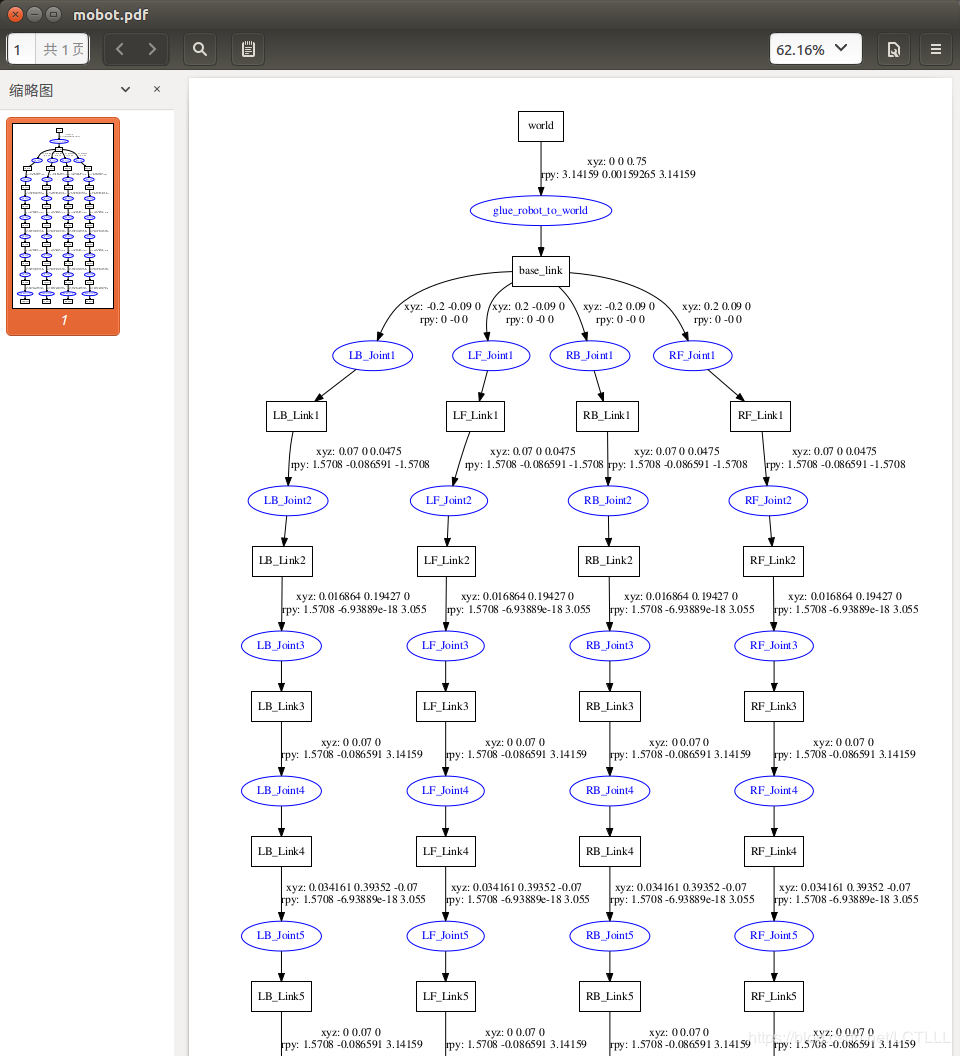
5 . 执行以下命令,以图形方式对连杆树进行可视化
urdf_to_graphiz filename_new.urdf
例:
![]() 显示如下结果
显示如下结果
![]()
看到文件目录下,多出pdf和gv文件

在文件管理器中打开文件

分别打开mobot.gv和mobot.pdf
至此,xacro文件转化URDF文件完成
作者:LCTLLL