【文献阅读及pytorch实践】FCN:Fully Convolutional Networks for Semantic Segmentation
https://github.com/shelhamer/fcn.berkeleyvision.org
可视化prototxt:netron
跑通caffemodel:import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
import caffe
# load image, switch to BGR, subtract mean, and make dims C x H x W for Caffe
im = Image.open('data/pascal/VOCdevkit/VOC2012/JPEGImages/2007_000129.jpg')
in_ = np.array(im, dtype=np.float32)
in_ = in_[:,:,::-1]
in_ -= np.array((104.00698793,116.66876762,122.67891434))
in_ = in_.transpose((2,0,1))
# load net
net = caffe.Net('voc-fcn8s/deploy.prototxt', 'voc-fcn8s/fcn8s-heavy-pascal.caffemodel', caffe.TEST)
# shape for input (data blob is N x C x H x W), set data
net.blobs['data'].reshape(1, *in_.shape)
net.blobs['data'].data[...] = in_
# run net and take argmax for prediction
net.forward()
out = net.blobs['score'].data[0].argmax(axis=0)
plt.imshow(out,cmap='gray');plt.axis('off')
plt.savefig('test.png')
plt.show()
数据集:
链接:https://pan.baidu.com/s/1qRvHIwxb7pHLq07WJ6ZGtg
提取码:pese
PASCAL VOC 2012 增强数据集(PASCAL VOC 2012 Augmented Dataset)是现目前语义分割领域最常用、也是最基础的benchmark数据集,它是由两个数据集合二为一制作的:
PASCAL VOC 20121:用于语义分割的图片数量分布为:训练集1464 ,验证集1449 ,测试集1456 ;
Semantic Boundaries Dataset2:训练集8498 ,验证集2857;
制作完成的增强数据集图片分布为:训练集10582,验证集1449,测试集1456。
第一部分.文献阅读 核心思想: 1.不含全连接层的全卷积网络,可适应任意尺寸输入; 2.增大数据尺寸的反卷积层,能够输出精细的结果; 3. 结合不同深度层结果的跳级结构,同时确保鲁棒性和精确性。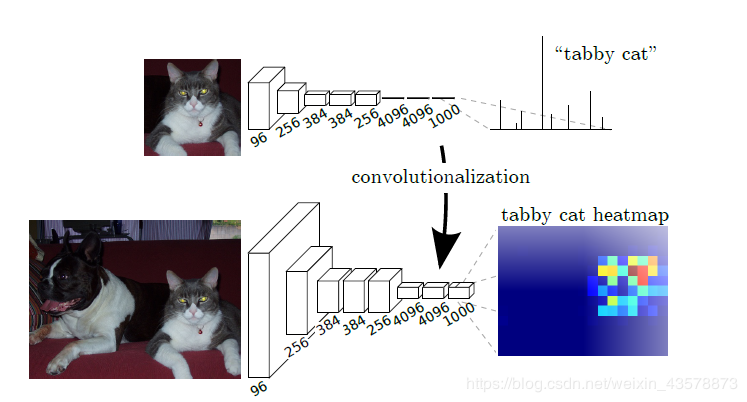
通过转置卷积来扩大尺寸。
转置卷积(或称为反卷积,在数学里面这个叫法是错误的)的前向就是卷积的后向,转置卷积的后向就是卷积的前向。
一个形象的展示反卷积过程的项目:
https://github.com/vdumoulin/conv_arithmetic
卷积:N = (w − k + 2p) / s + 1
反卷积:N = (w - 1) × s + k - 2p
损失函数是在最后一层的 spatial map上的 pixel 的 loss 和,在每一个 pixel 使用 softmax loss
网络结构: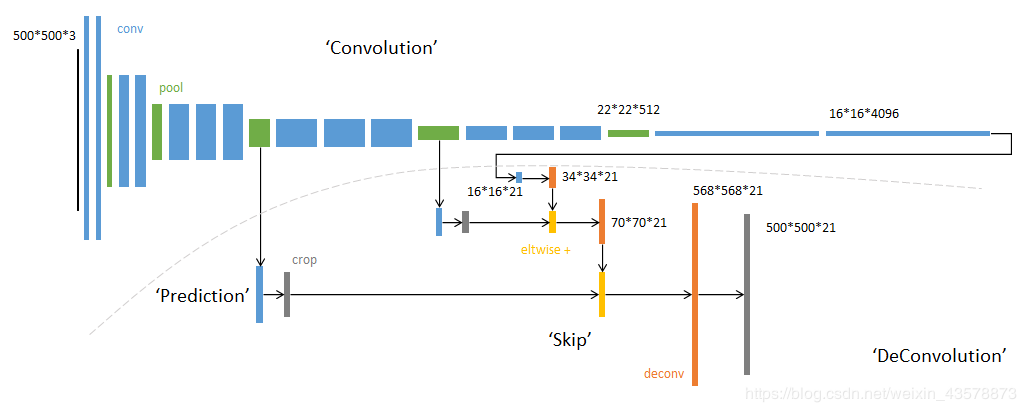
看作者提供的prototxt,crop与上图会产生一点偏差,如8s的最后一层crop是31,但是根据上图应该是34,原因在于pool之后尺寸变化有可能除不尽造成的向上保留的误差。
如果带着原始尺寸h,w做计算,就能跟作者给的crop对上。
def read_images(root, train):
txt_fname = root + ('train_aug.txt' if train else 'val.txt')
with open(txt_fname, 'rb') as f:
images = f.read().split()
data_path = []
label_path = []
for i in range(0, len(images), 2):
data_path.append(os.path.join(root + images[i].decode('gbk')))
label_path.append(os.path.join(root + images[i+1].decode('gbk')))
return data_path, label_path
构建自己的dataset:
class VocSegDataset(torch.utils.data.Dataset):
def __init__(self, root, train, transforms=None):
self.train = train
self.transforms = torchvision.transforms.Normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
)
self.data_list, self.label_list = read_images(root, train)
def __getitem__(self, item):
img = self.data_list[item]
label = self.label_list[item]
img = PIL.Image.open(img)
label = PIL.Image.open(label)
img = torchvision.transforms.ToTensor()(img)
img = self.transforms(img)
label = numpy.array(label)
label = torch.tensor(label).to(torch.float32)
return img, label
def __len__(self):
return len(self.data_list)
构建dataloader:
def make_data_loader(cfg, is_train):
#root = cfg['data']['root']
root = 'D:/datasets/VOC2012/TrainVal/'
dataset = VocSegDataset(root, is_train)
if is_train:
dataloader = torch.utils.data.DataLoader(dataset, shuffle=True)
else:
dataloader = torch.utils.data.DataLoader(dataset, shuffle=False)
return dataloader
定义网络:
class FCN8s(torch.nn.Module):
def __init__(self):
super(FCN8s, self).__init__()
self.conv1_1 = torch.nn.Conv2d(3, 64, 3, padding=100)
self.conv1_2 = torch.nn.Conv2d(64, 64, 3, padding=1)
self.conv2_1 = torch.nn.Conv2d(64, 128, 3, padding=1)
self.conv2_2 = torch.nn.Conv2d(128, 128, 3, padding=1)
self.conv3_1 = torch.nn.Conv2d(128, 256, 3, padding=1)
self.conv3_2 = torch.nn.Conv2d(256, 256, 3, padding=1)
self.conv3_3 = torch.nn.Conv2d(256, 256, 3, padding=1)
self.conv4_1 = torch.nn.Conv2d(256, 512, 3, padding=1)
self.conv4_2 = torch.nn.Conv2d(512, 512, 3, padding=1)
self.conv4_3 = torch.nn.Conv2d(512, 512, 3, padding=1)
self.conv5_1 = torch.nn.Conv2d(512, 512, 3, padding=1)
self.conv5_2 = torch.nn.Conv2d(512, 512, 3, padding=1)
self.conv5_3 = torch.nn.Conv2d(512, 512, 3, padding=1)
self.fc6 = torch.nn.Conv2d(512, 4096, 7)
self.fc7 = torch.nn.Conv2d(4096, 4096, 1)
self.score_fr = torch.nn.Conv2d(4096, 21, 1)
self.upscore2 = torch.nn.ConvTranspose2d(21, 21, 4, stride=2)
self.score_pool4 = torch.nn.Conv2d(512, 21, 1)
self.score_pool3 = torch.nn.Conv2d(256, 21, 1)
self.upscore8 = torch.nn.ConvTranspose2d(21, 21, 16, stride=8)
def forward(self, input):
# layer 1
x = self.conv1_1(input)
x = torch.nn.functional.relu(x)
x = self.conv1_2(x)
x = torch.nn.functional.relu(x)
pool_1 = torch.nn.functional.max_pool2d(x, 2, stride=2)
# layer 2
x = self.conv2_1(pool_1)
x = torch.nn.functional.relu(x)
x = self.conv2_2(x)
x = torch.nn.functional.relu(x)
pool_2 = torch.nn.functional.max_pool2d(x, 2, stride=2)
# layer 3
x = self.conv3_1(pool_2)
x = torch.nn.functional.relu(x)
x = self.conv3_2(x)
x = torch.nn.functional.relu(x)
x = self.conv3_3(x)
x = torch.nn.functional.relu(x)
pool_3 = torch.nn.functional.max_pool2d(x, 2, stride=2)
# layer 4
x = self.conv4_1(pool_3)
x = torch.nn.functional.relu(x)
x = self.conv4_2(x)
x = torch.nn.functional.relu(x)
x = self.conv4_3(x)
x = torch.nn.functional.relu(x)
pool_4 = torch.nn.functional.max_pool2d(x, 2, stride=2)
# layer 5
x = self.conv5_1(pool_4)
x = torch.nn.functional.relu(x)
x = self.conv5_2(x)
x = torch.nn.functional.relu(x)
x = self.conv5_3(x)
x = torch.nn.functional.relu(x)
pool_5 = torch.nn.functional.max_pool2d(x, 2, stride=2)
# fc6
x = self.fc6(pool_5)
x = torch.nn.functional.relu(x)
x = torch.nn.functional.dropout2d(x, training=self.training)
# fc7
x = self.fc7(x)
x = torch.nn.functional.relu(x)
x = torch.nn.functional.dropout2d(x, training=self.training)
# score
x = self.score_fr(x)
# upsample pool_4
x = self.upscore2(x)
score_pool_4 = self.score_pool4(pool_4)
score_pool_4 = score_pool_4[:, :, 5:5+x.size()[2], 5:5+x.size()[3]]
x = x + score_pool_4
# upsample pool_3
x = self.upscore2(x)
score_pool_3 = self.score_pool3(pool_3)
score_pool_3 = score_pool_3[:, :, 9:9+x.size()[2], 9:9+x.size()[3]]
x = x + score_pool_3
x = self.upscore8(x)
x = x[:, :, 31:31+input.size()[2], 31:31+input.size()[3]].contiguous()
return x
之后就可以开始训练了。
作者:Dogged21