Ubuntu16.04安装ROS
看了多篇文章总结出来
源特别重要
首先
我下面是直接一个接一个代码步骤
首先设置源(这个源可以用)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
更新软件
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
初始化 rosdep(initialize rosdep)
sudo rosdep init
rosdep update
环境配置(environment setup)
echo ''source /opt/ros/kinetic/setup.bash'' >> ~/.bashrc
source ~/.bashrc
构建依赖项(dependencies for building packages)
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
这就装好了
下面测试
在终端输入
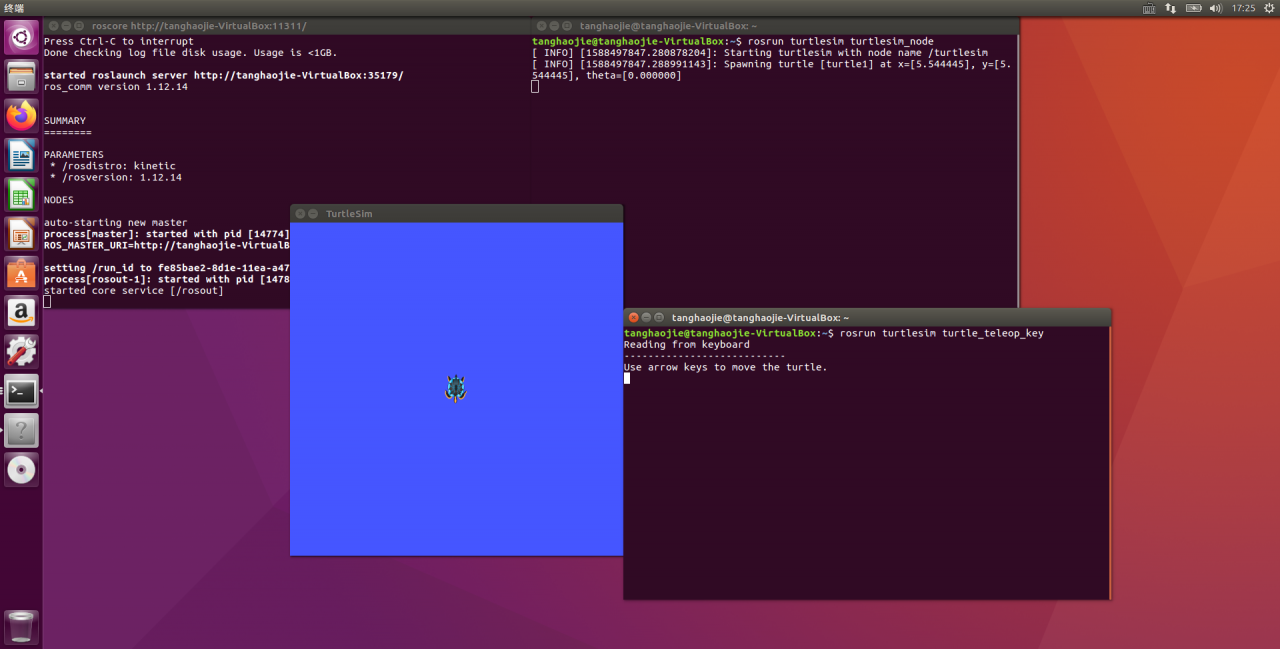
roscore

这种是正常现象
再打开海龟仿真器
rosrun turtlesim turtlesim_node
再打开一个终端
rosrun turtlesim turtle_teleop_key
最终图片呈现
 原创文章 126获赞 39访问量 1万+
关注
私信
展开阅读全文
原创文章 126获赞 39访问量 1万+
关注
私信
展开阅读全文
作者:他 不懂