PCL热力图显示兔子:按点与点的距离误差、FPFH特征误差显示
按距离显示:第0个点越远越红
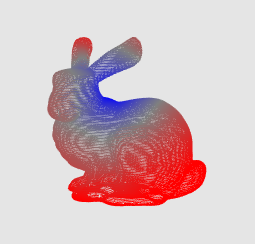
第0个点大致在脖子上?
#include #include #include #include #include #include #include #include #include #include #include using namespace pcl; using namespace std; float computeDist(const pcl::PointXYZ& p1, const pcl::PointXYZ& p2) { float dist = 0; dist = sqrt((p1.x - p2.x)*(p1.x - p2.x) + (p1.y - p2.y)*(p1.y - p2.y) + (p1.z - p2.z)*(p1.z - p2.z)); if (isnan(dist)) return 0; return dist; } int main() { //按距离映射到颜色上,颜色条生成规则自己定义 pcl::PointCloud::Ptr cloud(new pcl::PointCloud); pcl::io::loadPCDFile("bunny.pcd", *cloud); pcl::PointCloud::Ptr cloud_rgb(new pcl::PointCloud); for (int i = 0; i size(); i++) { pcl::PointXYZRGB point; point.x = cloud->points[i].x; point.y = cloud->points[i].y; point.z = cloud->points[i].z; //计算第0个点到所有点的距离,映射到0到255之间 float dist = computeDist(cloud->points[0], cloud->points[i])*2500; //将距离按规则转换 uint8_t r, g, b; if (dist > 255) r = 255; else r = int(dist); b = 255 - r; if (r > 125) g = b; else g = r; uint32_t rgba = (static_cast(r) << 16 | static_cast(g) << 8 | static_cast(b)); float rgbf = *reinterpret_cast(&rgba); point.rgb = rgbf; cloud_rgb->push_back(point); } //显示 pcl::visualization::PCLVisualizer viewer("12"); viewer.setBackgroundColor(0.9, 0.9, 0.9); viewer.addPointCloud(cloud_rgb); while (!viewer.wasStopped()) { viewer.spinOnce(); } return 0; }按特征误差显示:也是和第0个点作比较
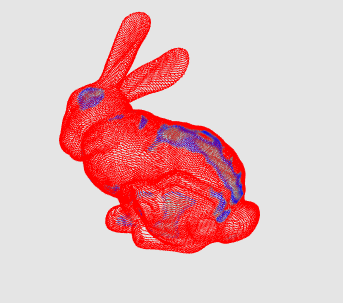
蓝色区域就是和第0个点的特征比较相似的区域,其他地方误差就有点大了。。。
#include #include #include #include #include #include #include #include #include #include #include #include #include #include using namespace pcl; using namespace std; typedef pcl::PointXYZ PointT; typedef pcl::PointCloud PointCloudT; float computeDist(pcl::FPFHSignature33& f1, pcl::FPFHSignature33& f2) { float dist_sum = 0; for (int i = 0; i < 33; i++) { dist_sum += (f1.histogram[i] - f2.histogram[i])*(f1.histogram[i] - f2.histogram[i]); } return dist_sum; } void computeNormal(PointCloudT::Ptr cloud, pcl::PointCloud::Ptr cloud_normal) { pcl::NormalEstimation ne; ne.setInputCloud(cloud); //ne.setRadiusSearch(0.002); ne.setKSearch(20); ne.compute(*cloud_normal); } void computeFPFH(PointCloudT::Ptr cloud, PointCloud::Ptr feats) { PointCloud::Ptr normal(new PointCloud); computeNormal(cloud, normal); FPFHEstimation fpfh; fpfh.setInputCloud(cloud); fpfh.setInputNormals(normal); //fpfh.setRadiusSearch(0.005); fpfh.setKSearch(50); fpfh.compute(*feats); } int main() { //按距离映射到颜色上,颜色条生成规则自己定义 pcl::PointCloud::Ptr cloud(new pcl::PointCloud); pcl::io::loadPCDFile("bunny.pcd", *cloud); PointCloud::Ptr feats(new PointCloud); computeFPFH(cloud, feats); pcl::PointCloud::Ptr cloud_rgb(new pcl::PointCloud); for (int i = 0; i size(); i++) { pcl::PointXYZRGB point; point.x = cloud->points[i].x; point.y = cloud->points[i].y; point.z = cloud->points[i].z; //计算第0个点到所有点的距离,映射到0到255之间 float dist = computeDist(feats->points[0], feats->points[i]); if (i % 100 == 0) cout << dist < 255) r = 255; else r = int(dist); b = 255 - r; if (r > 125) g = b; else g = r; uint32_t rgba = (static_cast(r) << 16 | static_cast(g) << 8 | static_cast(b)); float rgbf = *reinterpret_cast(&rgba); point.rgb = rgbf; cloud_rgb->push_back(point); } //显示 pcl::visualization::PCLVisualizer viewer("12"); viewer.setBackgroundColor(0.9, 0.9, 0.9); viewer.addPointCloud(cloud_rgb); while (!viewer.wasStopped()) { viewer.spinOnce(); } return 0; }
作者:zhangruijerry