resnet+tensorflow1.14+遥感图片二分类
import tensorflow as tf
def _resnet_block_v1(inputs, filters, stride, projection, stage, blockname, TRAINING):
# defining name basis
conv_name_base = 'res' + str(stage) + blockname + '_branch'
bn_name_base = 'bn' + str(stage) + blockname + '_branch'
with tf.name_scope("conv_block_stage" + str(stage)):
if projection:
shortcut = tf.layers.conv2d(inputs, filters, (1,1),
strides=(stride, stride),
name=conv_name_base + '1',
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
shortcut = tf.layers.batch_normalization(shortcut, axis=-1, name=bn_name_base + '1',
training=TRAINING, reuse=tf.AUTO_REUSE)
else:
shortcut = inputs
outputs = tf.layers.conv2d(inputs, filters,
kernel_size=(3, 3),
strides=(stride, stride),
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
name=conv_name_base+'2a', reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
outputs = tf.layers.batch_normalization(outputs, axis=-1, name=bn_name_base+'2a',
training=TRAINING, reuse=tf.AUTO_REUSE)
outputs = tf.nn.relu(outputs)
outputs = tf.layers.conv2d(outputs, filters,
kernel_size=(3, 3),
strides=(1, 1),
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
name=conv_name_base+'2b', reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
outputs = tf.layers.batch_normalization(outputs, axis=-1, name=bn_name_base+'2b',
training=TRAINING, reuse=tf.AUTO_REUSE)
outputs = tf.add(shortcut, outputs)
outputs = tf.nn.relu(outputs)
return outputs
def _resnet_block_v2(inputs, filters, stride, projection, stage, blockname, TRAINING):
# defining name basis
conv_name_base = 'res' + str(stage) + blockname + '_branch'
bn_name_base = 'bn' + str(stage) + blockname + '_branch'
with tf.name_scope("conv_block_stage" + str(stage)):
shortcut = inputs
outputs = tf.layers.batch_normalization(inputs, axis=-1, name=bn_name_base+'2a',
training=TRAINING, reuse=tf.AUTO_REUSE)
outputs = tf.nn.relu(outputs)
if projection:
shortcut = tf.layers.conv2d(outputs, filters, (1,1),
strides=(stride, stride),
name=conv_name_base + '1',
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
shortcut = tf.layers.batch_normalization(shortcut, axis=-1, name=bn_name_base + '1',
training=TRAINING, reuse=tf.AUTO_REUSE)
outputs = tf.layers.conv2d(outputs, filters,
kernel_size=(3, 3),
strides=(stride, stride),
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
name=conv_name_base+'2a', reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
outputs = tf.layers.batch_normalization(outputs, axis=-1, name=bn_name_base+'2b',
training=TRAINING, reuse=tf.AUTO_REUSE)
outputs = tf.nn.relu(outputs)
outputs = tf.layers.conv2d(outputs, filters,
kernel_size=(3, 3),
strides=(1, 1),
kernel_initializer=tf.contrib.layers.variance_scaling_initializer(),
name=conv_name_base+'2b', reuse=tf.AUTO_REUSE, padding='same',
data_format='channels_last')
outputs = tf.add(shortcut, outputs)
return outputs
def inference(images, training, filters, n, ver):
"""Construct the resnet model
Args:
images: [batch*channel*height*width]
training: boolean
filters: integer, the filters of the first resnet stage, the next stage will have filters*2
n: integer, how many resnet blocks in each stage, the total layers number is 6n+2
ver: integer, can be 1 or 2, for resnet v1 or v2
Returns:
Tensor, model inference output
"""
#Layer1 is a 3*3 conv layer, input channels are 3, output channels are 16
inputs = tf.layers.conv2d(images, filters=16, kernel_size=(3, 3), strides=(1, 1),
name='conv1', reuse=tf.AUTO_REUSE, padding='same', data_format='channels_last')
#no need to batch normal and activate for version 2 resnet.
if ver==1:
inputs = tf.layers.batch_normalization(inputs, axis=-1, name='bn_conv1',
training=training, reuse=tf.AUTO_REUSE)
inputs = tf.nn.relu(inputs)
for stage in range(3):
stage_filter = filters*(2**stage)
for i in range(n):
stride = 1
projection = False
if i==0 and stage>0:
stride = 2
projection = True
if ver==1:
inputs = _resnet_block_v1(inputs, stage_filter, stride, projection,
stage, blockname=str(i), TRAINING=training)
else:
inputs = _resnet_block_v2(inputs, stage_filter, stride, projection,
stage, blockname=str(i), TRAINING=training)
#only need for version 2 resnet.
if ver==2:
inputs = tf.layers.batch_normalization(inputs, axis=-1, name='pre_activation_final_norm',
training=training, reuse=tf.AUTO_REUSE)
inputs = tf.nn.relu(inputs)
axes = [1, 2]
inputs = tf.reduce_mean(inputs, axes, keep_dims=True)
inputs = tf.identity(inputs, 'final_reduce_mean')
inputs = tf.reshape(inputs, [-1, filters*(2**2)])
inputs = tf.layers.dense(inputs=inputs, units=2, name='dense1', reuse=tf.AUTO_REUSE)
return inputs
import os
from cv2 import cv2 as cv
import tensorflow as tf
import matplotlib.pyplot as plt
import numpy as np
import threading
import resnet_model
os.environ["TF_CPP_MIN_LOG_LEVEL"]="2"
def read_tfRecord(file_tfRecord): #输入是.tfrecords文件地址
queue = tf.train.string_input_producer([file_tfRecord])
reader = tf.TFRecordReader()
_,serialized_example = reader.read(queue)
features = tf.parse_single_example(
serialized_example,
features={
'image_raw':tf.FixedLenFeature([], tf.string),
'label':tf.FixedLenFeature([], tf.int64)
}
)
image = tf.decode_raw(features['image_raw'],tf.uint8)
image = tf.reshape(image,[256*256*3])
image = tf.cast(image, tf.float32)
image = tf.cast(image, tf.float32) * (1./ 255) - 0.5
# image = tf.image.per_image_standardization(image)
label = tf.cast(features['label'], tf.int64)
one_hot_labels = tf.one_hot(indices=label,depth=2, on_value=1, off_value=0, axis=-1, dtype=tf.int32, name="one-hot")
one_hot_labels=tf.cast(one_hot_labels,tf.float32)
return image,one_hot_labels
if __name__ == '__main__':
outputdir1 = "/root/UCMerced1"
outputdir2 = "/root/UCMerced2"
traindata1,trainlabel1 = read_tfRecord(outputdir1+".tfrecords")
traindata2,trainlabel2 = read_tfRecord(outputdir2+".tfrecords")
image_batch1,label_batch1 = tf.train.shuffle_batch([traindata1,trainlabel1],
batch_size=20,capacity=200,min_after_dequeue = 10)
image_batch2,label_batch2 = tf.train.shuffle_batch([traindata2,trainlabel2],
batch_size=20,capacity=200,min_after_dequeue = 10)
with tf.name_scope("Input_layer"):
x=tf.placeholder("float",[None,256*256*3],name="x")
x_image=tf.reshape(x,[-1,256,256,3])
with tf.name_scope("training_bool"):
training=tf.placeholder(tf.bool)
filters = 16 #the first resnet block filter number
n = 5 #the basic resnet block number, total network layers are 6n+2
ver = 2 #the resnet block version
inputs=resnet_model.inference(x_image,training, filters, n, ver)
y_predict=tf.nn.softmax(inputs)
with tf.name_scope("optimizer"):
y_label = tf.placeholder("float",[None, 2])
#cross_entropy = -tf.reduce_sum(y_*tf.log(y))
cross_entropy= -tf.reduce_mean(y_label * tf.log(tf.clip_by_value(y_predict,1e-10,1.0)))
#loss_function=tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=y_predict,labels=y_label))
update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS)
with tf.control_dependencies(update_ops):
optimizer=tf.train.AdadeltaOptimizer(learning_rate=0.1).minimize(cross_entropy)
with tf.name_scope("evaluate_model"):
correct_prediction=tf.equal(tf.arg_max(y_label,1),tf.arg_max(y_predict,1))
accuracy=tf.reduce_mean(tf.cast(correct_prediction,"float"))
tf.summary.scalar('accuracy', accuracy)
#train_step = tf.train.GradientDescentOptimizer(0.01).minimize(cross_entropy)
saver = tf.train.Saver(max_to_keep=5)
merged = tf.summary.merge_all()
Epochs=20
Epochs=30
trainEpochs=Epochs-1
batchSize=20
loss_list=[]
epoch_list=[]
accuracy_list=[]
sess=tf.Session()
writer = tf.summary.FileWriter('/root/qzlogs',tf.get_default_graph())
coord = tf.train.Coordinator()
threads = tf.train.start_queue_runners(sess=sess,coord = coord)
sess.run(tf.global_variables_initializer())
batch_x2,batch_y2=sess.run([image_batch2,label_batch2])
try:
while not coord.should_stop():
for epoch in range(10000):
for i in range(8):
batch_x,batch_y=sess.run([image_batch1,label_batch1])
summary,_=sess.run([merged,optimizer],feed_dict={x:batch_x,y_label:batch_y,training:True})
writer.add_summary(summary,epoch)
loss,acc=sess.run([cross_entropy,accuracy],feed_dict={x:batch_x2,y_label:batch_y2,training:False})
epoch_list.append(epoch)
loss_list.append(loss)
accuracy_list.append(acc)
print("-----------------------------------------------------------")
print("Train Epoch:","%02d"%(epoch+1),"Loss=","{:.9f}".format(loss),"Accuracy=",acc)
saver.save(sess, "model_conv/my-model", global_step=epoch)
print ("save the model")
print("------------------------------------------------------------")
if epoch>=trainEpochs:
coord.request_stop()
except tf.errors.OutOfRangeError:
print ('Done training -- epoch limit reached')
finally:
# When done, ask the threads to stop. 请求该线程停止
coord.request_stop()
# And wait for them to actually do it. 等待被指定的线程终止
coord.join(threads)

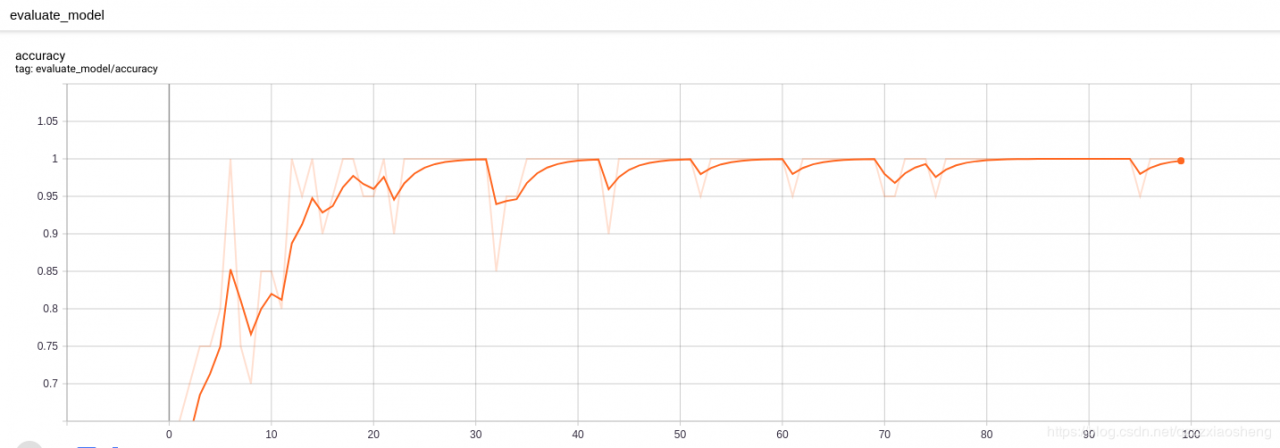 简要实现了如何用resnet编写二分类,环境是tensorflow1.14, 最后准确率高达1,不知道是不是过拟合了。
简要实现了如何用resnet编写二分类,环境是tensorflow1.14, 最后准确率高达1,不知道是不是过拟合了。
参考博客代码
作者:哈哈,有点意思