树莓派raspberry 安装ubuntu18.04 server + desktop + ros1
debian 版本的ros1 有诸多不便,所以装个ubuntu 出来
ubuntu 安装介绍网站https://ubuntu.com/tutorials/how-to-install-ubuntu-on-your-raspberry-pi#1-overview
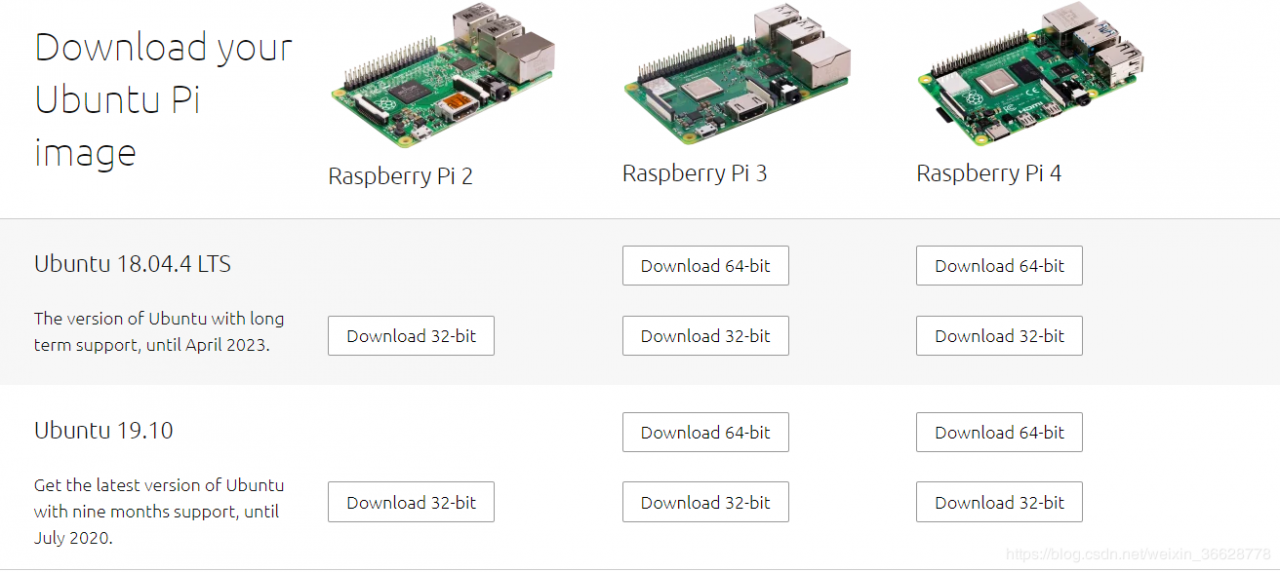
树莓派 ubuntu server 18.04 下载地址https://ubuntu.com/download/raspberry-pi
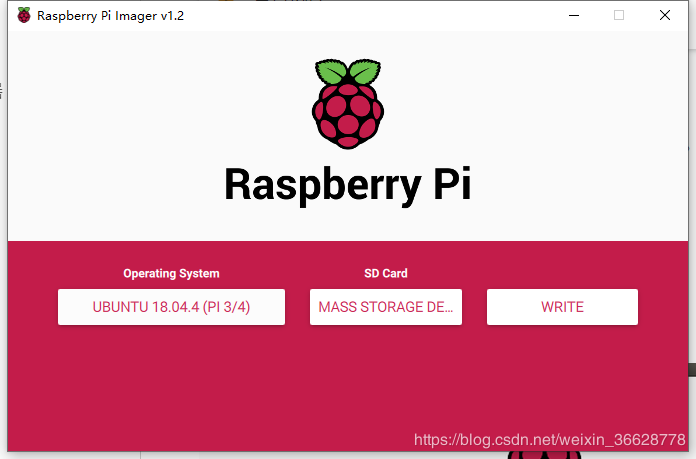
使用Raspberry Pi Imager for Windows制作镜像,这个好像更方便点
不用纠结操作系统
下面安装官方的顺序来
1.概述您将学到什么
如何创建可启动的Ubuntu Server microSD卡
如何在Raspberry Pi上设置Internet连接
如何远程访问您的Raspberry Pi
你需要什么
microSD卡(最小4GB,建议8GB)
Raspberry Pi的Ubuntu服务器映像
带有microSD卡驱动器的计算机
Raspberry Pi 2、3或4
微型USB电源线(用于Pi 4的USB-C)
具有Internet连接的Wi-Fi网络或以太网电缆
并可选:
带有HDMI接口的显示器
Pi 2和3的HDMI电缆以及Pi 4的微型HDMI电缆
USB键盘
谷歌翻译厉害
地址:
适用于Ubuntu的Raspberry Pi Imager 适用于Windows的Raspberry Pi Imager 适用于macOS的Raspberry Pi Imager长这个样子,有树莓派的logo

我选择了,18.04 ubuntu server,是在线下载,干嘛让我准备镜像。。。。
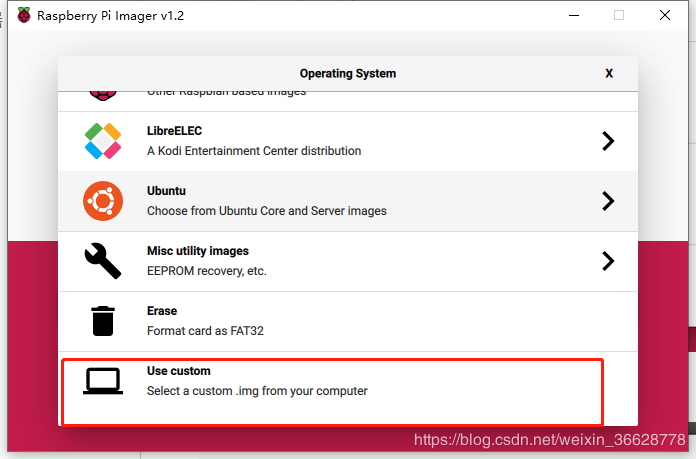
这儿可以选择本地镜像,就不下载了
write

迅雷下载,放到全英文路径下

error extracting archive: Lzma library error: Corrupted
比较下md5sum,果然不一样

bingo

如果你是有线接入可以不用搞
配置无线的方式有两种,3.1 和 3.2 随便选一个就行
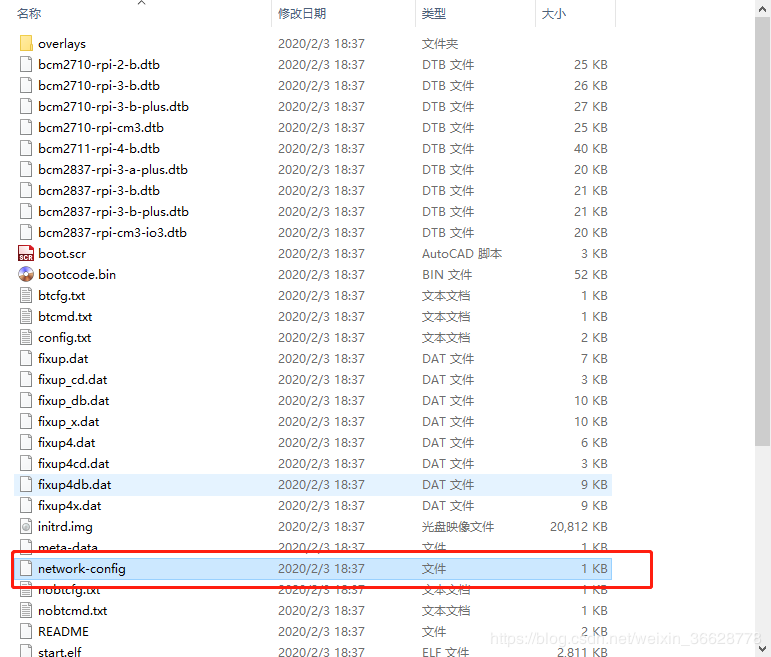
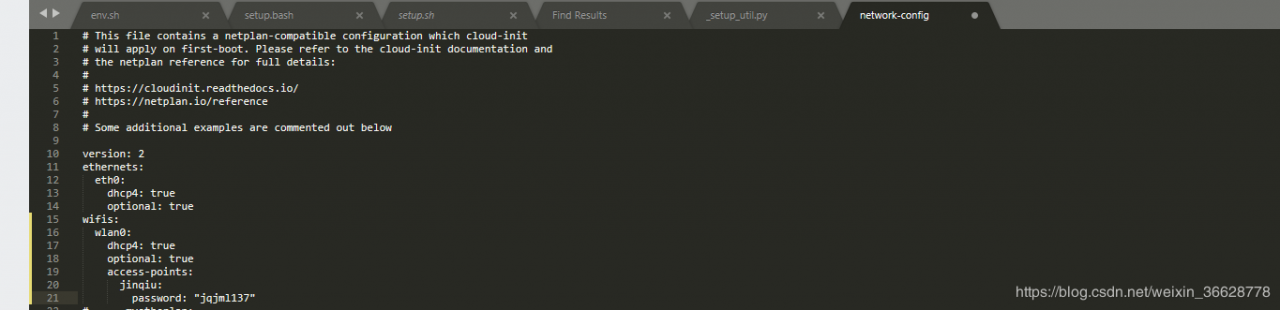
3.1 改启动文件打开它
官方指导

整
如果没有修改network-config文件
启动之后修改 /etc/netplan/50-cloud-init.yaml
改成这样
# This file is generated from information provided by the datasource. Changes
# to it will not persist across an instance reboot. To disable cloud-init's
# network configuration capabilities, write a file
# /etc/cloud/cloud.cfg.d/99-disable-network-config.cfg with the following:
# network: {config: disabled}
network:
ethernets:
eth0:
dhcp4: true
optional: true
version: 2
wifis:
wlan0:
access-points:
xxxx:# 你的wifi名字
password: xxxxx # 你的wifi 密码
dhcp4: true
optional: true
4.启动
4.1 第一次配置
启动之后进入 tty1
输入账号:ubuntu
密码:ubuntu
第一次会要求改密码,改个长一点的
然后重启之后,wifi就会自动连接了
4.2 ssh连接用个啥工具都行,我用的mobaxterm
5.安装桌面这个连接讲了几个桌面的差异,自己挑个喜欢的
https://blog.csdn.net/davidhzq/article/details/102594328
ubuntu
kubuntu

xubuntu

lubuntu 系统没出来。。。
按大小比较的话,我还是装ubuntu 吧,实际上还是不装的好
先改成国内arm源 sudo vim /etc/apt/sources.list
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
装起来太慢了,能不装就不装了吧。。。用server版也挺好的, 装成功了,界面进去之后卡死了。。。。以后再试其他的吧,卸载。。
6.装ros1官网: http://wiki.ros.org/cn/melodic/Installation/Ubuntu
6.1 添加 sources.listsudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
6.2 添加公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
6.3 安装
装个基础包吧,反正我不打算用桌面,看rviz 的话,设置下ros_master ip
sudo apt update
sudo apt install ros-melodic-ros-base
6.4 初始化 rosdep
sudo apt-get install python-rosdep
sudo rosdep init
rosdep update
6.5 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
6.6 测试
roscore
明天换个卡,装ros2,睡觉
作者:越来越胖了_jml