强化学习笔记(4)无模型控制Model-Free Control(On-policy learning, off-policy learning, GLIE, Sarsa, Q-learning)
前面所说的MC、TD、TD(λ\lambdaλ)都是不依赖模型的情况下如何 预测。即求解给定策略下的状态价值或者行为价值函数。
现在所有解决的问题是: 不基于模型条件下,如何优化个体学习的价值函数,同时提升自身策略,是不基于模型的控制问题
一些可以解决的问题:
电梯调度 直升机特技飞行 机器人行走 打电子游戏特点:
MDP模型未知,但是可以利用经验。 MDP模型已知,但是问题规模过大。 概念 On-Policy learningLearn On the job。利用当前的去学习
利用策略π\piπ所得到的经验 去优化策略π\piπ
Off-Policy learning “站在巨人的肩膀上学习” 利用其它的策略所获得的经验去学习优化策略π\piπ Monte-Carlo Control 问题1:使用行为价值函数代替状态价值函数控制过程就是策略优化的过程。可以按照动态规划的思路。在价值函数策略更新之间不断的迭代。最终达到最优。
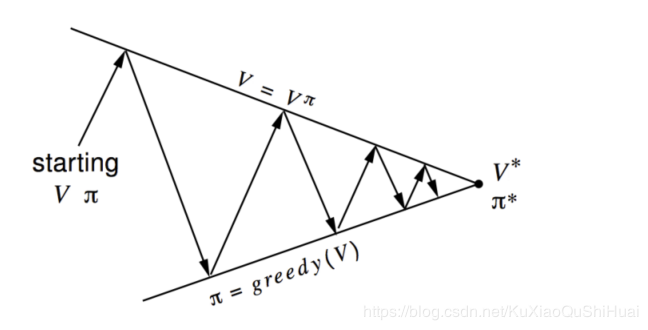
如果想要达到这个效果,就需要求出在策略π\piπ下状态价值函数V。
贪婪策略基于状态价值的更新,需要知道整个MDP模型。因为
π′(s)=argmaxa∈A(Rsa+Pss′aV(s′))
\pi'(s) = argmax_{a \in A} (R_s^a + P_{ss'}^a V(s'))
π′(s)=argmaxa∈A(Rsa+Pss′aV(s′))
π′(s)=argmaxa∈AQ(s,a) \pi'(s) = arg max_{a\in A}Q(s,a) π′(s)=argmaxa∈AQ(s,a)
可见基于行为价值函数的策略更新,是不需要知道模型信息的,无需各个 状态之间的转换概率Pss′aP_{ss'}^aPss′a。是model-free。MC算法本身就是就是model-free的。所以使用Q状态价值函数更加方便。
问题2:使用贪婪算法的局限性动态规划中,第一次使用uniform random policy(均一随机策略),一次迭代之后,开始使用贪婪策略加快速度。最终能够收敛到最优解。
但是在model free中,由于不知道整体的环境,一般不能收敛到最优解,有可能落到局部最优。如果价值更高的状态使用贪婪算法将无法探索到,价值低的也很难再次被经历。
例有很多品牌的糖果。小明一开始购买了品牌A的某一个口味,打分5.0。 然后又买了B品牌的某个口味,觉得很好吃,打了9分。如果是贪婪策略,第三次小明应该还是购买B品牌,这次打分6分。经过三次之后,A品牌平均分是5纷,B品牌是7.5平均分。所以贪婪策略告诉小明第四次还是B品牌,这次打分是7分。
B一定比A好吗? 不一定,因为小明只尝试了A品牌的某个口味的,可能其他的都更好。
B一定是最好的吗?不,还有很多品牌没有尝试,所以就不能够作为参考。
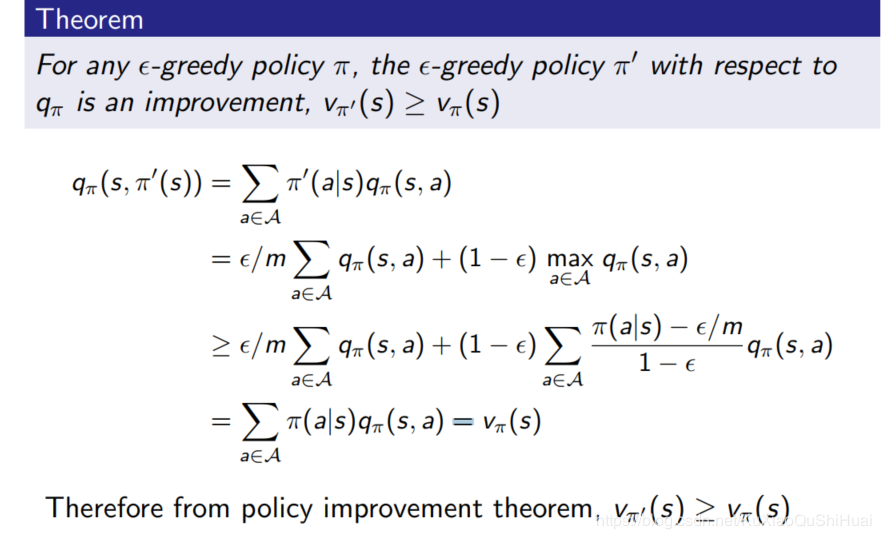
解决方案:ϵ−greedy\epsilon-greedyϵ−greedy解决这个问题的方法就是使用不完全贪婪策略(ϵ−greedy\epsilon-greedyϵ−greedy)。
在每次进行选择时,
ϵ\epsilonϵ的概率去随机选择,从而保证探索的广度。
(1-ϵ\epsilonϵ )的概率去使用贪婪策略。
在策略π\piπ,状态s下,执行动作a的概率:
KaTeX parse error: Undefined control sequence: \cal at position 86: … argmax_{a \in \̲c̲a̲l̲ ̲A} Q(s,a)\\
\ep…
定理证明:
不完全贪婪算法得到的状态价值是递增的
Greedy in the Limit with Infinite Exploration
所有的状态动作对都被探索无数次
limk→∞Nk(s,a)=∞
\lim_{k \rightarrow \infin} N_k(s,a) = \infin
k→∞limNk(s,a)=∞
随着采样趋向于无穷,策略收敛于贪婪策略
KaTeX parse error: Undefined control sequence: \cal at position 66: …rg\max_{a' \in \̲c̲a̲l̲ ̲A}Q_k(s,a'))
GLIE MC控制能收敛到最优的状态行为价值函数。
GLIE Monte-Carlo Control 第k次采样,使用策略π\piπ :{S1,A1,R2,...STS_1,A_1,R_2, ... S_TS1,A1,R2,...ST} ~$ \pi$ 对于每个序列中的状态和动作,例如StS_tSt和AtA_tAtN(St,At)←N(St,At)+1Q(St,At)←Q(St,At)+1N(St,At)(Gt−Q(St,At)) N(S_t,A_t) \leftarrow N(S_t, A_t) +1 \\ Q(S_t , A_t) \leftarrow Q(S_t, A_t) + \frac{1}{N(S_t,A_t)}(G_t - Q(S_t,A_t)) N(St,At)←N(St,At)+1Q(St,At)←Q(St,At)+N(St,At)1(Gt−Q(St,At))
基于动作价值函数提升策略ϵ←1/kπ←ϵ−greedy(Q) \epsilon \leftarrow 1/k \\ \pi \leftarrow \epsilon-greedy(Q) ϵ←1/kπ←ϵ−greedy(Q) 定理
GLIE Monte-Carlo control 收敛于最优行为价值函数。 Q(s,a)→q∗(s,a)Q(s,a) \rightarrow q_*(s,a)Q(s,a)→q∗(s,a)
TD Control Sarsa利用MC控制的思路:
给TD应用Q(S,A) 使用不完全贪婪策略 每个时间步都更新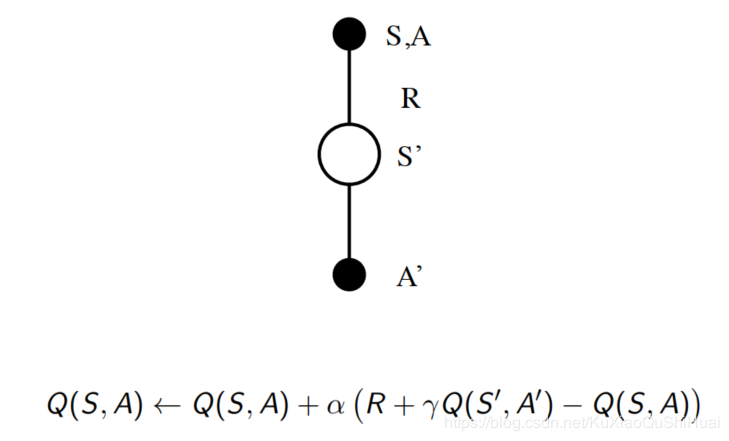
SARSA名称的来历如图。
不同于MC在整个序列结束后更新。Sarsa是在每个时间步,如图,状态S之后的S‘确定采取行为A’后,对状态行为价值对Q(S,A)进行更新。
使用ϵ−greedy\epsilon-greedyϵ−greedy策略
算法描述输入:episodes(序列),α\alphaα(学习率), γ\gammaγ(衰减因子)
输出:Q
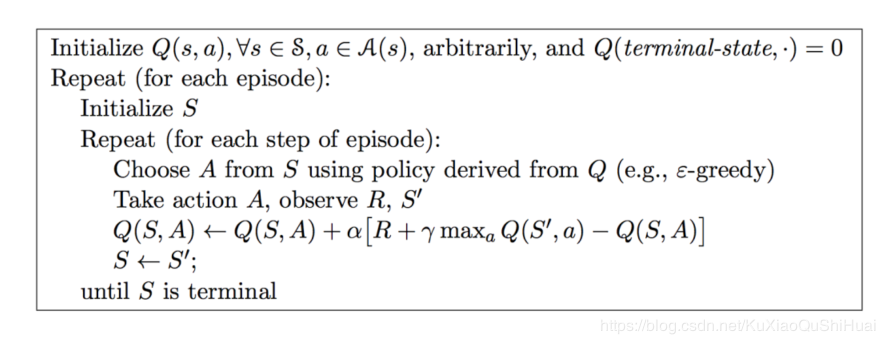
初始化:对于每个状态集合KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲{s}里的状态s和动作集合KaTeX parse error: Undefined control sequence: \cal at position 1: \̲c̲a̲l̲ ̲A(s)里的动作a,任意设置Q(s,a)的值; 设置Q(终止状态,·)= 0
对于每个序列:
初始化:S=序列的第一个状态
A= policy(Q,S) // 可以使不完全贪婪策略
对于序列的每一步:
R,S'= perform_action(S,A)
A' = policy(Q,S')
Q(S,A) = Q(S,A) + \alpha(R+ \gamma * Q(S',A') - Q(S,A))
S = S'; A = A';
直到终止状态
直到所有序列都被访问
定理
当一下条件成立,Sarsa收敛到最优的行为价值函数 Q(s,a)→q∗(s,a)Q(s,a) \rightarrow q_*(s,a)Q(s,a)→q∗(s,a):
GLIE 特性
Robbins-Monro sequence of step-sizes αt\alpha_tαt (学习率满足)
∑t=1∞αt=∞∑t=1∞αt2<∞
\sum_{t=1}^{\infin} \alpha_t = \infin \\
\sum_{t=1}^{\infin} \alpha_t^2 < \infin
t=1∑∞αt=∞t=1∑∞αt2<∞
是根据n-step TD来的。
n-step Q-return (n步Q收获)定义qt(n)=Rt+1+γRt+2+...+γn−1Rt+n+γnQ(St+n) q_t^{(n)} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{n-1}R_{t+n} + \gamma ^{n}Q(S_{t+n}) qt(n)=Rt+1+γRt+2+...+γn−1Rt+n+γnQ(St+n)
n-step Sarsa 通过n-step Q-return 更新公式Q(St,At)←Q(St,At)+α(qt(n)−Q(St,At)) Q(S_t,A_t) \leftarrow Q(S_t, A_t ) + \alpha(q_t^{(n)} - Q(S_t,A_t)) Q(St,At)←Q(St,At)+α(qt(n)−Q(St,At))
qλq^\lambdaqλ和TD(λ)TD(\lambda)TD(λ)类似,给n-step Q return 的每一步分配一个权重
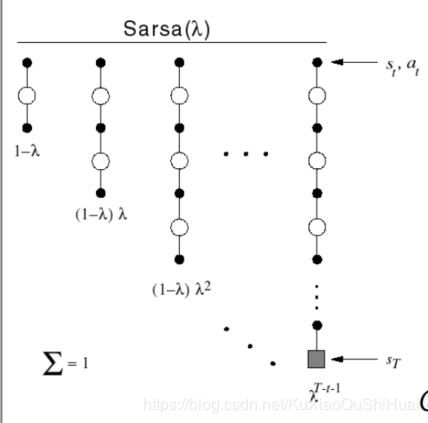
qtλ=(1−λ)∑n=1∞λn−1qt(n) q_t^{\lambda} = (1-\lambda) \sum_{n = 1}^{\infin} \lambda^{n-1} q_t^{(n)} qtλ=(1−λ)n=1∑∞λn−1qt(n)
Sarsa(λ)Sarsa(\lambda)Sarsa(λ) Forward view使用qtλq_t^ \lambdaqtλ 收获来更新状态行为对的Q值,就可以得到Sarsa(λ)Sarsa(\lambda)Sarsa(λ)前向认识
Q(St,At)←Q(St,At)+α(qt(λ)−Q(St,At))
Q(S_t,A_t) \leftarrow Q(S_t, A_t) + \alpha(q_t^{(\lambda)} - Q(S_t , A_t))
Q(St,At)←Q(St,At)+α(qt(λ)−Q(St,At))
前向认识需要遍历整个序列,再更新Q价值。
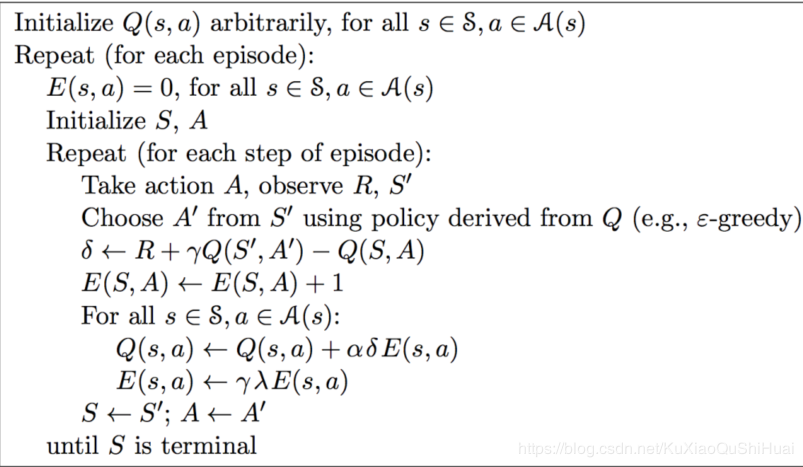
Backward View Sarsa(λ)Sarsa(\lambda)Sarsa(λ)和TD(λ)TD(\lambda)TD(λ)类似,在online算法中使用效用迹(eligibility traces)
但,对于每个状态行为价值对,Sarsa(λ)Sarsa(\lambda)Sarsa(λ)都有一个eligibility trace
E0(s,a)=0;Et(s,a)=γλEt−1(s,a)+1(St=s,At=a)
E_0(s,a) = 0 ;\\
E_t(s,a) = \gamma \lambda E_{t-1}(s,a) + 1(S_t = s, A_t = a)
E0(s,a)=0;Et(s,a)=γλEt−1(s,a)+1(St=s,At=a)
体现的是一个结果与某个状态行为对的因果关系
更新公式:(δt\delta_tδt是TD-error, Et(s,a)E_t(s,a)Et(s,a)是Eligibility trace)
δt=Rt+1+γQ(St+1,At+1)−Q(St,At)Q(s,a)←Q(s,a)+αδtEt(s,a)
\delta_t = R_{t+1} + \gamma Q(S_{t+1}, A_{t+1}) - Q(S_t, A_t) \\
Q(s,a) \leftarrow Q(s,a) + \alpha \delta_t E_t (s,a)
δt=Rt+1+γQ(St+1,At+1)−Q(St,At)Q(s,a)←Q(s,a)+αδtEt(s,a)
通过策略 μ(a∣s)\mu(a|s)μ(a∣s) 生成行为, 但是更新 状态行为对的价值时采用目标策略π(a∣s)\pi(a|s)π(a∣s)。 目标策略π\piπ是一个相对更好的策略。例如借鉴人的已有经验或者其他的agent所学内容。
包括基于MC的和基于TD的。基于MC目前仅有理论上的研究价值。实际应用不大。
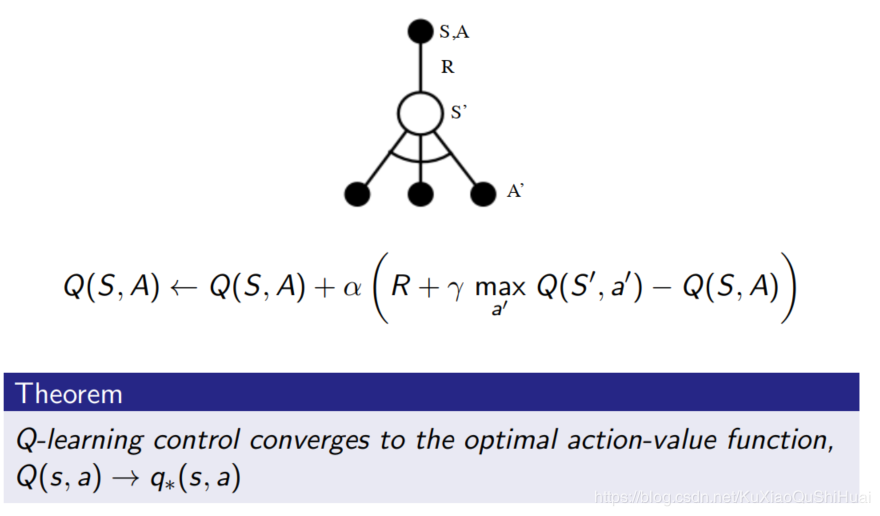
Q-learning 估计不同分布的数学期望EX∼P[f(x)]=∑P(x)f(x)=∑Q(x)P(x)Q(x)f(x)=EX∼Q[P(x)Q(x)f(x)] \mathbb E_{X \sim P}[f(x)] = \sum P(x)f(x) \\ =\sum Q(x) \frac{P(x)}{Q(x)}f(x) \\ = \mathbb E_{X\sim Q} [\frac{P(x)}{Q(x)}f(x)] EX∼P[f(x)]=∑P(x)f(x)=∑Q(x)Q(x)P(x)f(x)=EX∼Q[Q(x)P(x)f(x)]
TD Q-learning 状态价值函数公式V(St)←V(St)+α(π(At∣St)μ(At∣St)(Rt+1+γV(St+1))−V(St)) V(S_t) \leftarrow V(S_t) + \alpha (\frac{\pi(A_t|S_t)}{\mu(A_t|S_t)} (R_{t+1} + \gamma V(S_{t+1})) - V(S_t)) V(St)←V(St)+α(μ(At∣St)π(At∣St)(Rt+1+γV(St+1))−V(St))
理解:
在状态S_t 中,按照策略μ\muμ产生了一个行为AtA_tAt , 执行这个行为后进入状态St+1S_{t+1}St+1。
μ(At∣St)\mu(A_t|S_t)μ(At∣St)代表行为策略在状态StS_tSt下产生动作AtA_tAt的概率
π(At∣St)\pi(A_t | S_t)π(At∣St)代表借鉴的策略在状态StS_tSt下产生动作AtA_tAt的概率
如果两个策略下的概率比值接近1,说明这两种策略在状态StS_tSt时采取AtA_tAt的概率是相同的。
如果比值很小,说明借鉴策略和当前策略所做选择很大程度都不一样。没有借鉴的意义,系数很小。
如果比值很大,说明借鉴策略选择行为AtA_tAt的可能性要大于当前策略,所以很有借鉴意义,系数很大。
转换状态行为对价值函数Q(s,a)当前动作下一个状态是根据策略μ\muμ来的。即 At+1∼μ(⋅∣s)A_{t+1} \sim \mu(· | s)At+1∼μ(⋅∣s)
认为接下来的可替换的动作A′∼π(⋅∣St)A' \sim \pi(· | S_t)A′∼π(⋅∣St)
通过可替换动作A’来更新Q(St,At)Q(S_t, A_t)Q(St,At)
Q(St,At)←Q(St,At)+α(Rt+1+γQ(St+1,A′)−Q(St,At))
Q(S_t, A_t) \leftarrow Q(S_t,A_t) + \alpha (R_{t+1} + \gamma Q(S_{t+1}, A') - Q(S_t,A_t))
Q(St,At)←Q(St,At)+α(Rt+1+γQ(St+1,A′)−Q(St,At))
行为策略μ\muμ是基于行为价值函数Q(s,a),ϵ−Q(s,a), \epsilon-Q(s,a),ϵ−贪婪策略
借鉴策略π\piπ则是基于Q(s,a)Q(s,a)Q(s,a)的完全贪婪策略。
$R_{t+1} + \gamma Q(S_{t+1}, A’) KaTeX parse error: Undefined control sequence: \是 at position 1: \̲是̲基于**借鉴策略\pi∗∗产生的行为A′得到的Q值。根据这种更新方式,状态St依据∗∗不完全贪婪策略∗∗得到的行为At的价值将朝着下一个状态**产生的行为A' 得到的Q值。根据这种更新方式,状态S_t依据**不完全贪婪策略**得到的行为A_t的价值将朝着下一个状态∗∗产生的行为A′得到的Q值。根据这种更新方式,状态St依据∗∗不完全贪婪策略∗∗得到的行为At的价值将朝着下一个状态S_{t+1}$下贪婪策略确定的方向按照一定比例更新。
这样既能够保证μ\muμ策略更加接近贪婪策略,同时保证个体持续探索并经历足够丰富的新状态。
可以将一部分化简:
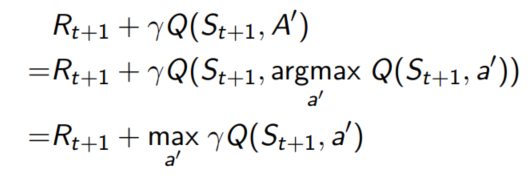
最终:
作者:SpadeA_Iverxin