硬核操作,用四种语言对无人机KAKA进行PID仿真(C,C++,Matlab,Python)(源码和结果)
前言:本文只提供源代码和仿真结果,了解原理和推导过程可参考《某科学的PID算法学习笔记》
前言:本文只提供源代码和仿真结果,了解原理和推导过程可参考《[某科学的PID算法学习笔记](https://www.cnblogs.com/brosy/p/12838456.html)》一、问题二、解答三、源码和结果1) Matlab2) C3) C++4) Python懒得复制?直接下载源码
一、问题
 BROSY
BROSY
 原创文章 6获赞 6访问量 934
关注
私信
展开阅读全文
原创文章 6获赞 6访问量 934
关注
私信
展开阅读全文
作者:BROSY
在《机甲大师》动漫中,主角“单单”拥有一架语音遥控的双旋翼无人机,名叫“KAKA"。如图1,动漫第一集5:35左右,KAKA在追踪飞盘时,突然受海风影响,飞行姿态偏离水平位置。性能超高的KAKA通过内部传感器测得偏角后,迅速调整姿态,恢复水平。请对这一情形进行建模分析。
略,答案较长,请参考《某科学的PID算法学习笔记》
三、源码和结果 1) Matlab编辑器:在线版matlab
clear,clc,close all % 清屏
syms x
SV = 0; % 设定值,角(弧)度 0 (rad)
T = 0.01; % 计算周期/采样周期
Kp = 50; % 比例系数
Ti = 5; % 积分时间常数
Td = 0.05; % 微分时间常数
E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad)
for i = 1:1:3 % 绘制3种比较曲线
if i == 2;
Kp = 50; % 比例系数
Ti = 0.05; % 积分时间常数
Td = 0.05; % 微分时间常数
E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad)
end % if i ==2
if i ==3;
Kp = 50; % 比例系数
Ti = 5; % 积分时间常数
Td = 0.005; % 微分时间常数
E = []; % 历史偏差
Fout = []; % 输出值,升力
E(1) = pi ./3; % 初始角度 π/3 (rad)
end % if i ==3
for t = 0:0.01:3; % 计算300次
k = round(t*100 + 2); % 当前指数
E(k) = E(1) - 25*(T^2)*sum(Fout); % 获取当前值
%#### 核心,PID计算输出值 ####%
if k>2;
if E(k) != 0;
Fout(k) = Kp*(E(k) + (T./Ti)*sum(E) + (Td./T)*(E(k)-E(k-1)));
end % end if E(k) !=0
end % end if k>2
%#############################%
k++; % 当前指数+1
end % end for 计算400次
hold on
plot(E) % 显示数据图
end # for 绘制3种比较曲线
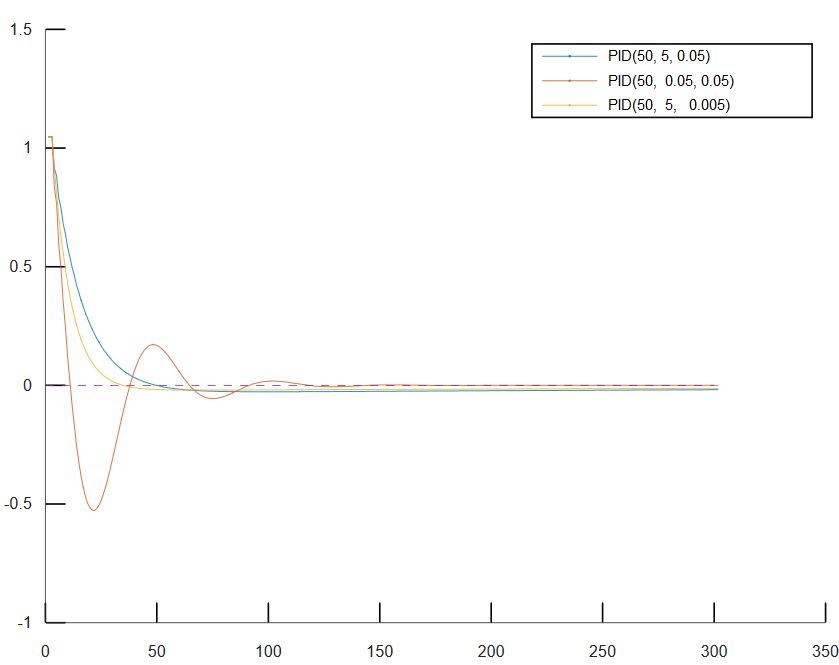
legend('PID(50, 5, 0.05)','PID(50, 0.05, 0.05)','PID(20, 5, 0.005)')
hold on
plot([0,300],[0,0],'--'); % 显示参考线,斜率0,截距0
编辑器:Visual Studio 2019 社区版
/**@file main.c
* @brief 位置式PID C语言算法仿真
* @author BROSY
* @copyright CSU | BROSY
********************************************************************************/
/*************************************************************************************
注:以便查阅,我将所有函数和声明都放在main.c中,进行项目实践时,再设计文件架构
*************************************************************************************/
#include
#define PI (3.1416)
typedef struct {
const int SV = 0; // 设定值(弧度rad)
double InitVal; //初始偏差值
double T; // 采样周期
double Kp; // 比例系数
double Ti; // 积分时间常数
double Td; // 微分时间常数
double Ek; //当前偏差
double SumEk; //历史偏差之和
double Ek_1; //上次偏差
double SumFout; // 输出值之和
}PID_Structure;
/**
@brief 位置式PID输出函数
@param [in] PID结构体
@return 算法输出值(额外升力)
*/
double PID_OUT(PID_Structure* PID)
{
double Fout;
Fout = PID->Kp * (PID->Ek
+ (PID->T / PID->Ti) * PID->SumEk
+ (PID->Td / PID->T) * (PID->Ek - PID->Ek_1));
return Fout; // 输出值(额外升力)
}
/**
@brief 获取当前偏差值
@param [in] PID结构体, 历史输出值(数组)
@return kaka当前状态偏差值
*/
double GetCurrE(PID_Structure PID)
{
double Ek;
Ek = PID.InitVal - 25 * (PID.T * PID.T) * PID.SumFout;
return Ek;
}
int main()
{
PID_Structure PID; // 创建PID
PID.InitVal = PI / 3;
PID.T = 0.01;
PID.Kp = 50;
PID.Ti = 5;
PID.Td = 0.005;
PID.Ek = 0;
PID.Ek_1 = 0;
PID.SumFout = 0;
PID.SumEk = 0;
// 计算400次
for (int i = 0; i 0)
{
PID.Ek_1 = PID.Ek; // 获取k-1的偏差值
}
PID.Ek = GetCurrE(PID); // 获取当前偏差值
PID.SumEk += PID.Ek; // 历史偏差之和
printf("%f\n", PID.Ek);
if (PID.Ek != 0 && i > 0) // 误差
{
PID.SumFout += PID_OUT(&PID); // 获取输出值之和
}
else
{
PID.SumFout += 0; // 储存输出值
}
}
}
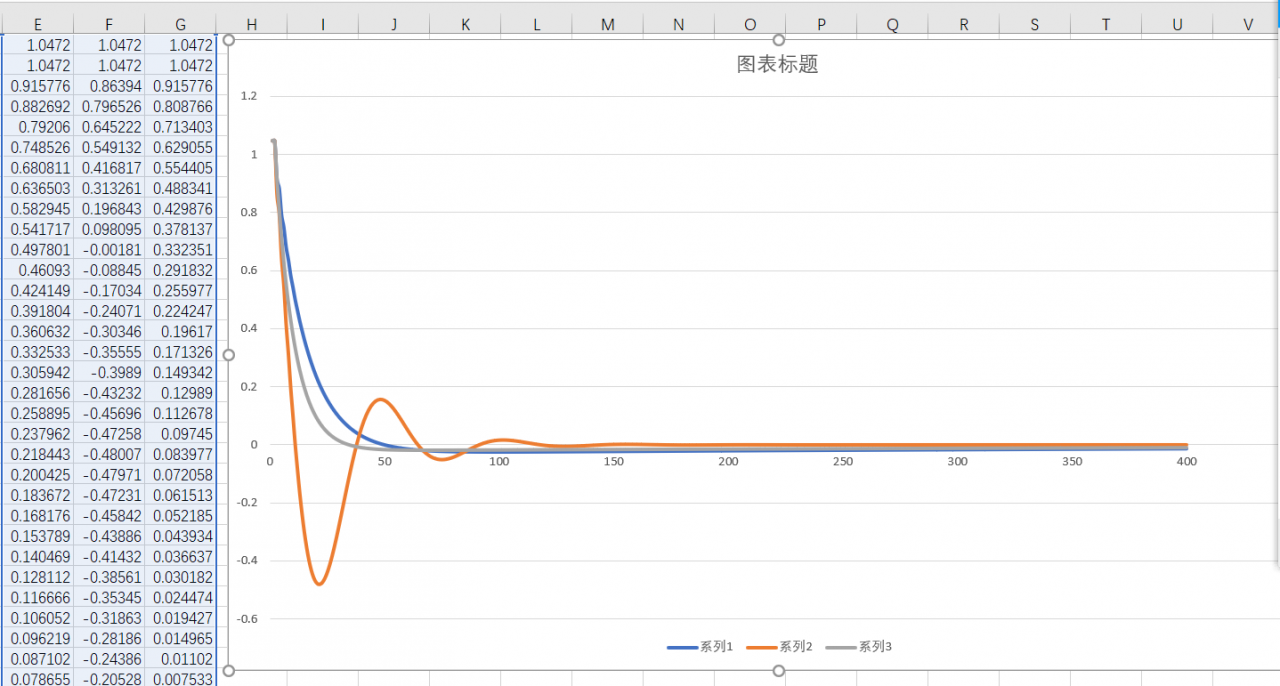
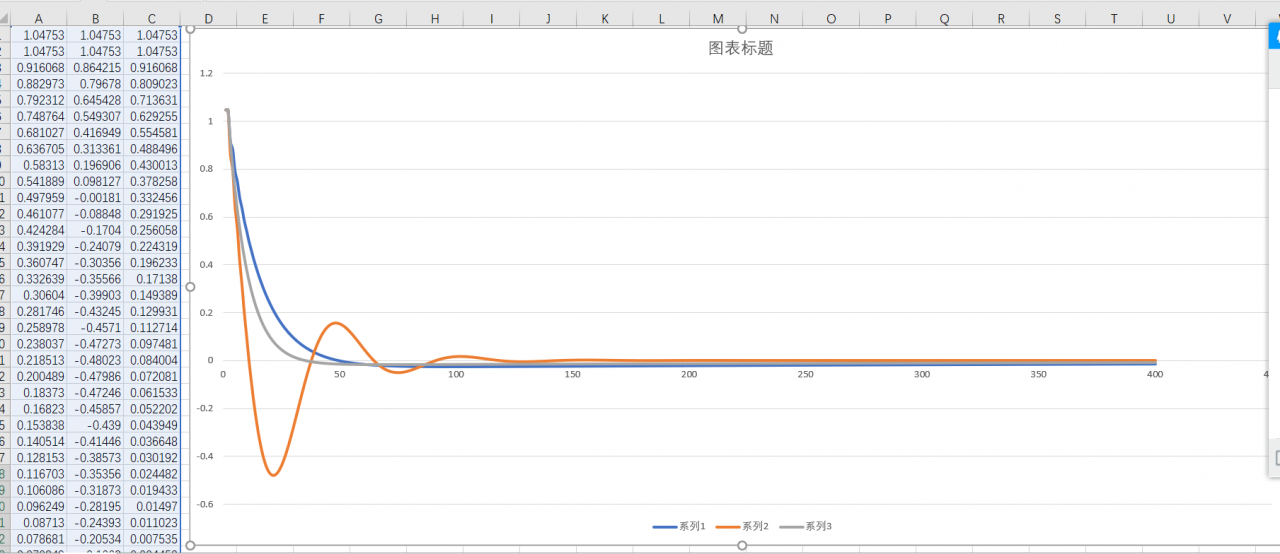
将输出结果导入到excel中并绘制曲线:
注意C++分为三个文件main.cpp, PID.cpp, PID.h,编辑器为Visual Studio 2019 社区版。
main.cpp
/**@file main.cpp
* @brief 位置式PID C语言算法仿真
* @author BROSY
* @copyright CSU | BROSY
********************************************************************************/
#include "PID.h"
int main()
{
PID* pid[3]; // 创建PID
pid[0] = new PID(50, 5, 0.05); // 初始化PID1
pid[1] = new PID(50, 0.05, 0.05); // 初始化PID2
pid[2] = new PID(50, 5, 0.005); // 初始化PID3
for (int i = 0; i Loop(400);// 计算400次
delete pid[i]; // 释放内存
}
}
PID.cpp
#include "PID.h"
#include
/**
@brief 初始化PID参数
@param [in] P I D系数
只设置P I D的系数,其余默认
*/
PID::PID(double P, double I, double D)
{
Kp = P;
Ti = I;
Td = D;
InitVal = (3.1426)/3; // 初始偏差值π/3
T = 0.01; // 采样周期
Ek = 0; //当前偏差
SumEk = 0; //历史偏差之和
Ek_1 = 0; //上次偏差
SumFout = 0; // 输出值之和
}
/**
@brief 位置式PID输出函数
@return 算法输出值(额外升力)
*/
double PID::PID_OUT()
{
double Fout;
Fout = Kp * (Ek
+ (T / Ti) * SumEk
+ (Td / T) * (Ek - Ek_1));
return Fout; // 输出值(额外升力)
}
/**
@brief 获取当前偏差值
@return kaka当前状态偏差值
*/
double PID::GetCurrE()
{
double Ek;
Ek = InitVal - 25 * (T * T) * SumFout;
return Ek;
}
/**
@brief 循环计算并输出值
@param [in] 计算次数
*/
void PID::Loop(int times)
{
std::cout << "计算次数:" << times << std::endl;
std::cout << "P = " << Kp << std::endl;
std::cout << "I = " << Ti << std::endl;
std::cout << "D = " << Td << std::endl<<std::endl;
for (int i = 0; i 0)
{
Ek_1 = Ek; // 获取k-1的偏差值
}
Ek = GetCurrE(); // 获取当前偏差值
SumEk += Ek; // 历史偏差之和
std::cout << Ek < 0) // 误差
{
SumFout += PID_OUT(); // 获取输出值之和
}
else
{
SumFout += 0; // 储存输出值
}
}
}
PID.h
#pragma once
class PID
{
private:
const int SV = 0; // 设定值(弧度rad)
double InitVal; //初始偏差值
double T; // 采样周期
double Kp; // 比例系数
double Ti; // 积分时间常数
double Td; // 微分时间常数
double Ek; //当前偏差
double SumEk; //历史偏差之和
double Ek_1; //上次偏差
double SumFout; // 输出值之和
public:
PID(double P, double I, double D); // PID初始化,只输入PID系数,其余默认
double PID_OUT(); // PID算法核心,计算输出值
double GetCurrE(); // 获取当前值
void Loop(int times); // 循环计算输入计算次数
};
版本:Python3.6,编辑器:PyCharm 2019.3.1
注意:需要安装numpy和matplotlib库
可输入下面指令进行安装
pip install numpy
pip install matplotlib
import matplotlib.pyplot as plt # 导入绘图库
import numpy as np
'''
@brief 位置式PID输出函数
@param [in] PID结构体
@return 算法输出值(额外升力)
'''
def pid_out():
f_out = Kp * (Ek
+ (T / Ti) * sum_Ek
+ (Td / T) * (Ek - Ek_1))
return f_out
'''
@brief 获取当前偏差值
@param [in] PID结构体, 历史输出值(数组)
@return kaka当前状态偏差值
'''
def get_curr_e():
ek = init_val - 25 * (T ** 2) * sum_f_out
return ek
sv = 0.0 # 设定值
init_val = (3.1416) / 3 # 初始值
T = 0.01 # 采样周期
times = 300 # 计算次数
e = np.zeros(times)
for t in range(3):
Ek = 0.0 # 当前偏差
sum_Ek = 0.0 # 历史偏差之和
Ek_1 = 0.0 # 上一次偏差
sum_f_out = 0.0 # 输出值之和(升力)
if t == 0:
Kp = 50 # 比例系数
Ti = 5 # 积分时间常数
Td = 0.05 # 微分时间常数
if t == 1:
Kp = 50 # 比例系数
Ti = 0.05 # 积分时间常数
Td = 0.05 # 微分时间常数
if t == 2:
Kp = 50 # 比例系数
Ti = 5 # 积分时间常数
Td = 0.005 # 微分时间常数
'''
@brief 循环计算并输出值
@param [in] 计算次数
'''
for i in range(times):
if i > 0:
Ek_1 = Ek
Ek = get_curr_e() # 获取当前值
sum_Ek = sum_Ek + Ek # 获取历史值之和
e[i] = Ek # 储存当前值,方便后面绘图
if Ek != 0 and i > 0:
sum_f_out = sum_f_out + pid_out() # 获取输出值之和
plt.plot(e, label='PID({0}, {1}, {2})'.format(Kp, Ti, Td)) # 画曲线图,显示PID图例
plt.plot(np.zeros(times + 25), label='SV', linestyle='--') # 设定值
plt.legend() # 显示图例
plt.show()

链接:PID仿真源码
密码:hhh
BROSY
原创文章 6获赞 6访问量 934
关注
私信
展开阅读全文
作者:BROSY