用Proteus8.9自带STM32F401VE的Controller仿真STM32F407ZGT6,F429IGT6
一,
目前得到的 Proteus8.9版本软件能够支持的Cortex-M4固件库项目,只能到达STM32F401VE (如下图1所示)。
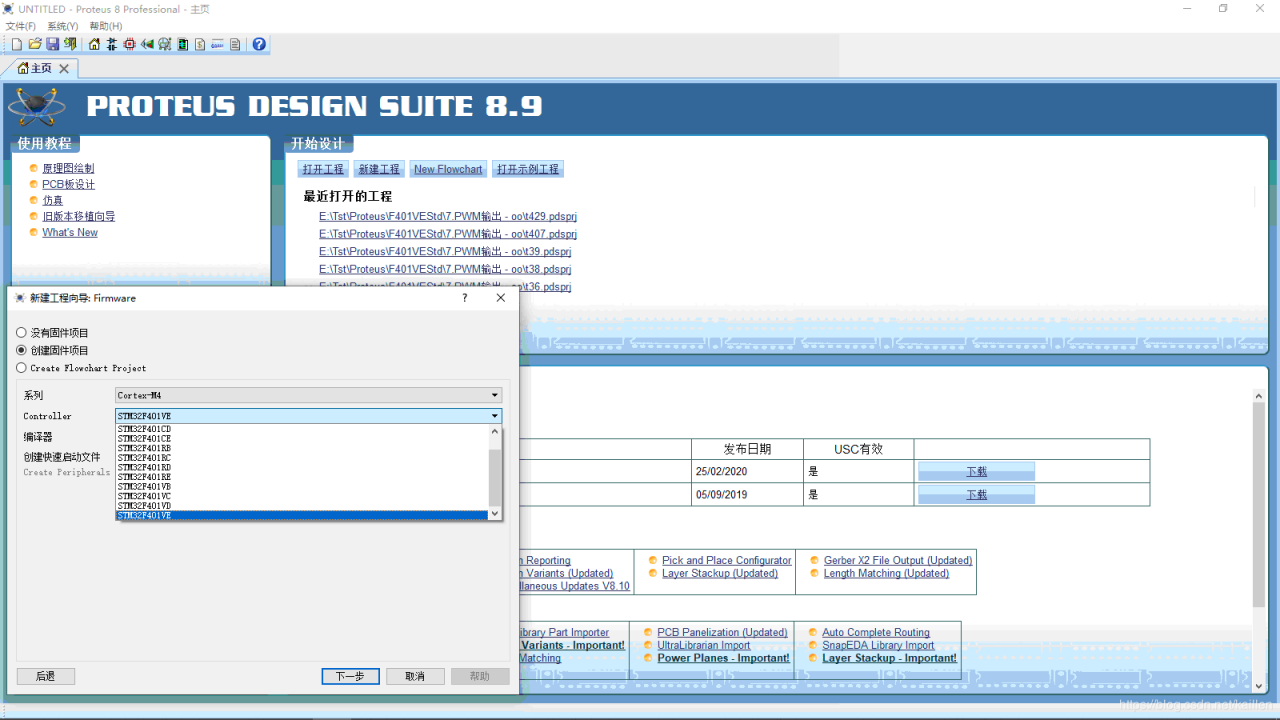
(图1)
作为ST公司Cortex-M4更为广泛应用的F407,F429系列芯片;现在的Proteus8.9版本软件还没有固件库支持,不能对F407,F429系列芯片进行仿真实验。
但STM32F401VE的固件库基于Cortex-M4,笔者就想利用Proteus8.9版本软件现有的STM32F401VE的固件库,对F407,F429系列芯片通过Proteus VSM Studio进行仿真实验应用。
首先生成STM32F401VE的固件库项目,选取STM32F401VE的芯片和其他组件(如下图2所示)。
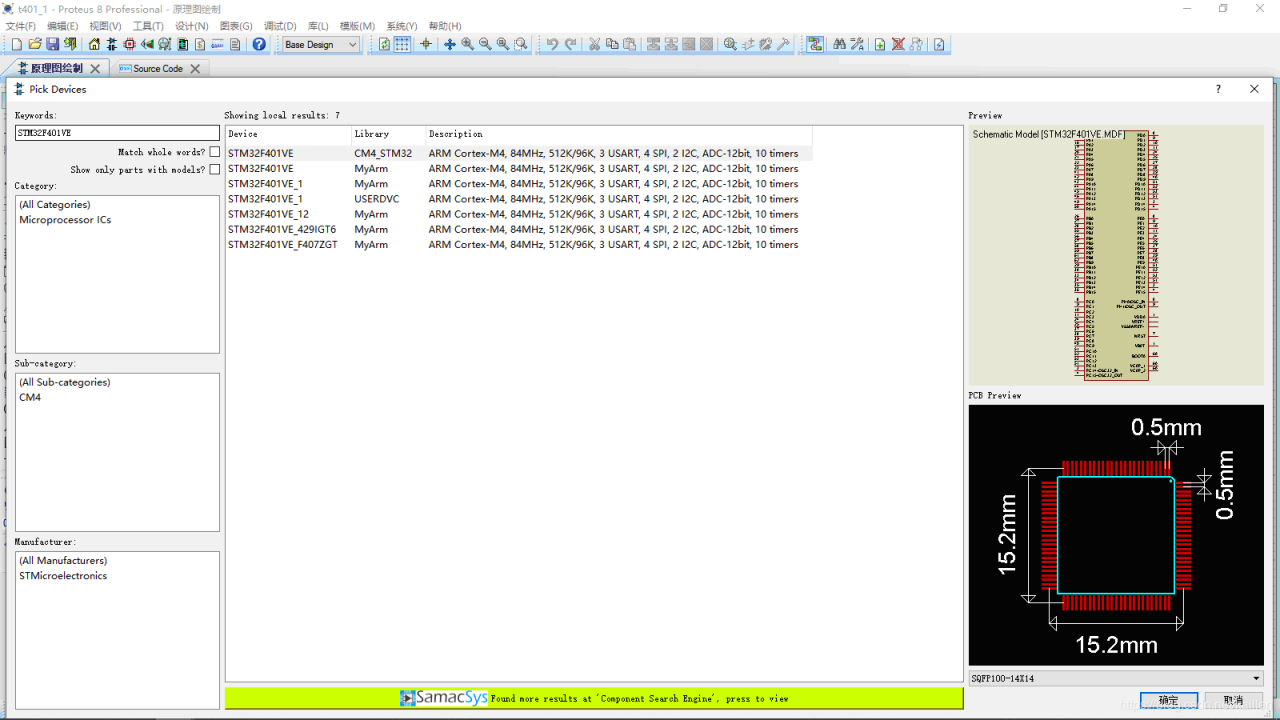
(图2)
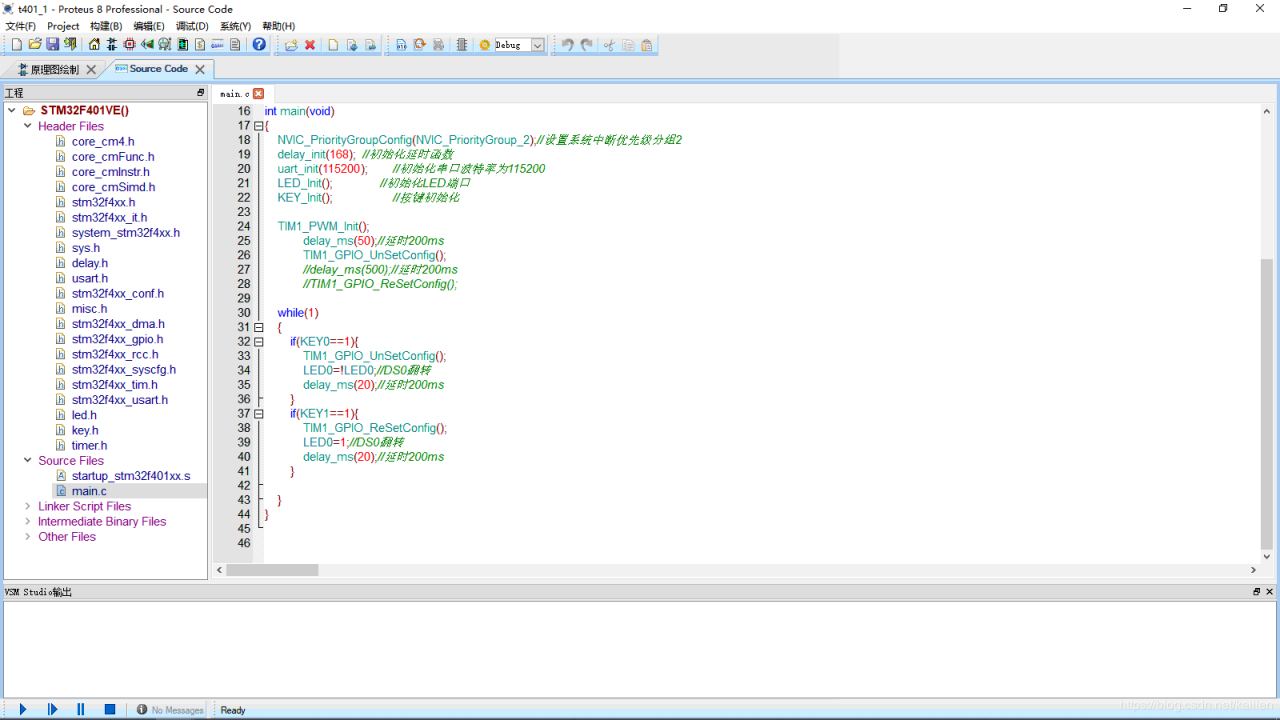
接着搭建一个Timer—>PWM项目,即通过首先生成STM32F401VE的通用定时器Timer1生成三组不同频率的和不同占空比的方波实验(如下图3所示)。
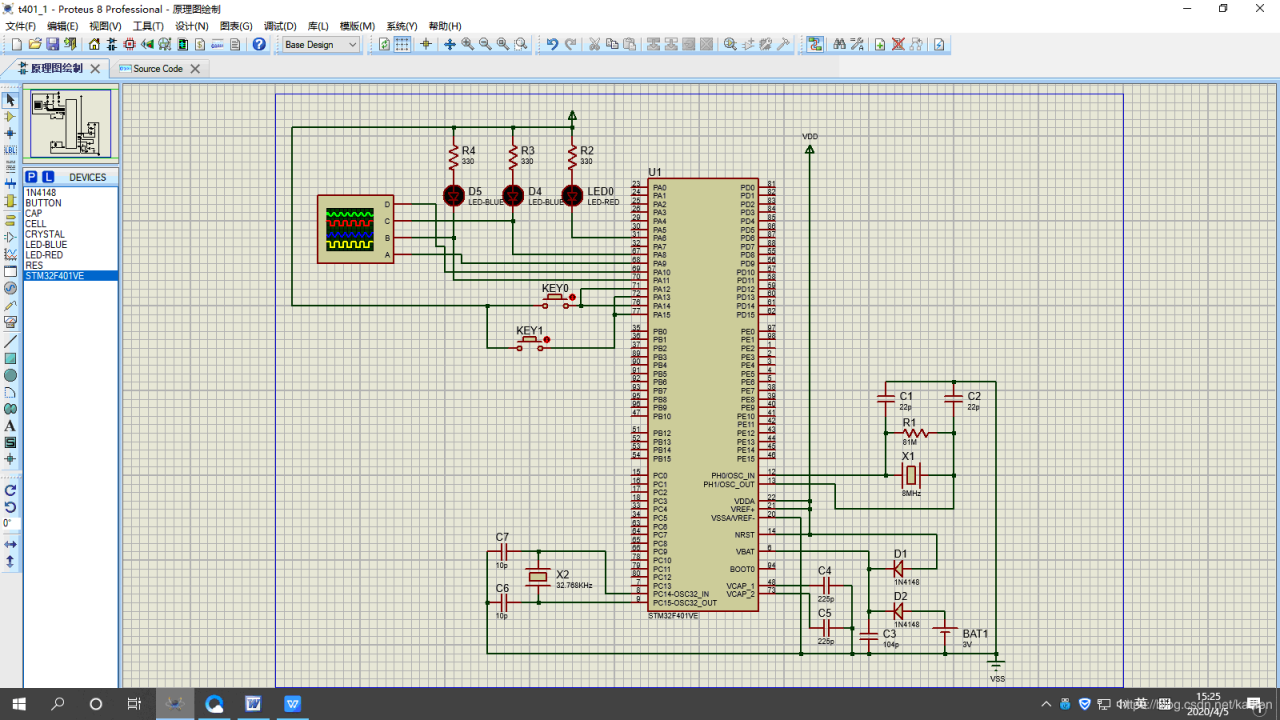
(图3)
用Proteus VSM Studio编写代码,编译,仿真。Main.c代码(如下图4,5所示)。
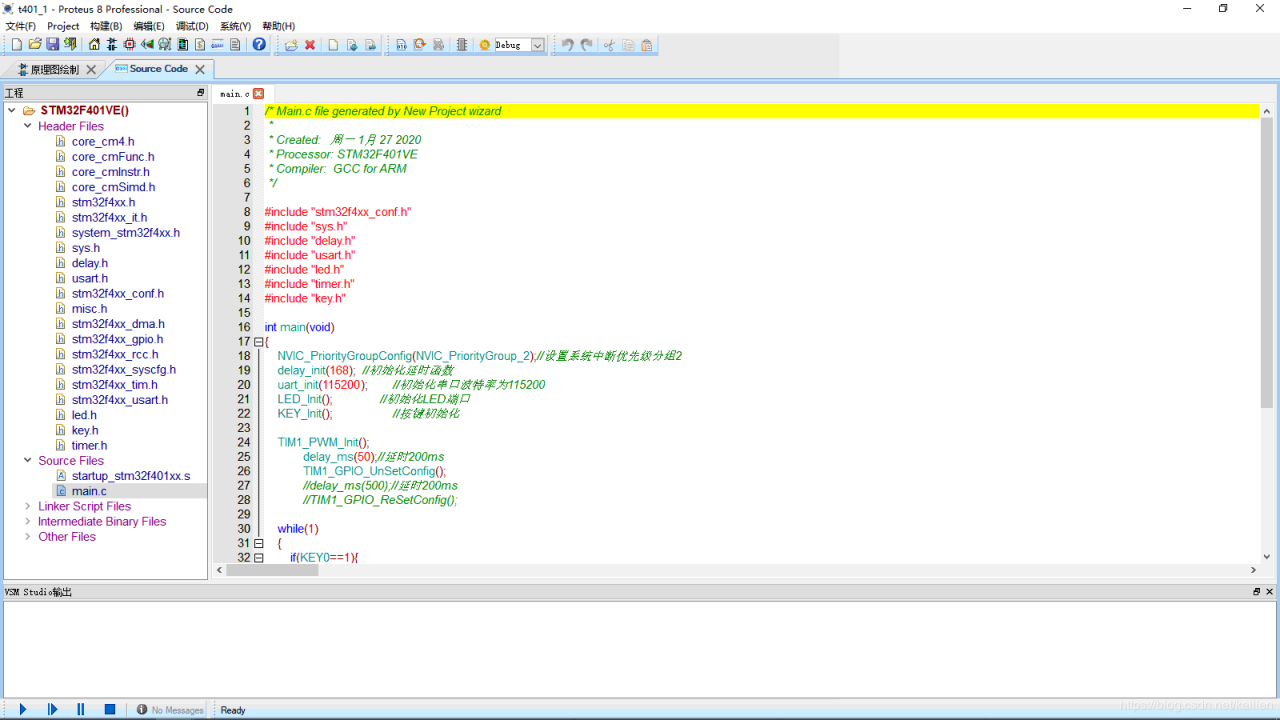
(图4)
(图5)
其他led.c代码:
#include “led.h”
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOF时钟
//GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6| GPIO_Pin_12| GPIO_Pin_13;//LED对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
LED0=1;
GPIO_ResetBits(GPIOA, GPIO_Pin_12);
GPIO_ResetBits(GPIOA, GPIO_Pin_13);
}
Led.h代码:
#ifndef __LED_H
#define __LED_H
#include “sys.h”
//LED端口定义
#define LED0 PAout(6) // DS0
//#define LED1 PBout(8) // DS1
void LED_Init(void);//初始化
#endif
Key.c代码:
#include “key.h”
#include “delay.h”
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOA,GPIOE时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14| GPIO_Pin_15; //KEY0 对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ;//下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOE4
}
key.h代码:
#ifndef __KEY_H
#define __KEY_H
#include “sys.h”
#define KEY0 PAin(14) //PA14
#define KEY1 PAin(15) //PA15
void KEY_Init(void); //IO初始化
#endif
timer.c代码:
#include “timer.h”
#include “led.h”
#include “usart.h”
extern u8 ov_frame;
extern volatile u16 jpeg_data_len;
void TIM1_Mode_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
u16 CCR1_Val =700;
TIM_TimeBaseStructure.TIM_Period = 2800;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
//TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
//TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//TIM_OC1Init(TIM1, &TIM_OCInitStructure);
//TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = CCR1_Val*2;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC3Init(TIM1, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_Pulse = CCR1_Val*3;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC4Init(TIM1, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
void TIM1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8| GPIO_Pin_9| GPIO_Pin_10| GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource8,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_TIM1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_TIM1);
}
void TIM1_GPIO_ReSetConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource8,GPIO_AF_TIM1);
}
void TIM1_GPIO_UnSetConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8| GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA, GPIO_Pin_8);
GPIO_ResetBits(GPIOA, GPIO_Pin_11);
}
void TIM1_PWM_Init(void)
{
TIM1_GPIO_Config();
TIM1_Mode_Config();
}
timer.h代码:
#ifndef _TIMER_H
#define _TIMER_H
#include “sys.h”
void TIM1_PWM_Init(void);
void TIM1_Mode_Config(void);
void TIM1_GPIO_Config(void);
void TIM1_GPIO_ReSetConfig(void);
void TIM1_GPIO_UnSetConfig(void);
//void TIM3_Int_Init(u16 arr,u16 psc);
#endif
用Proteus VSM Studio编译已完成的代码(如下图6所示)。
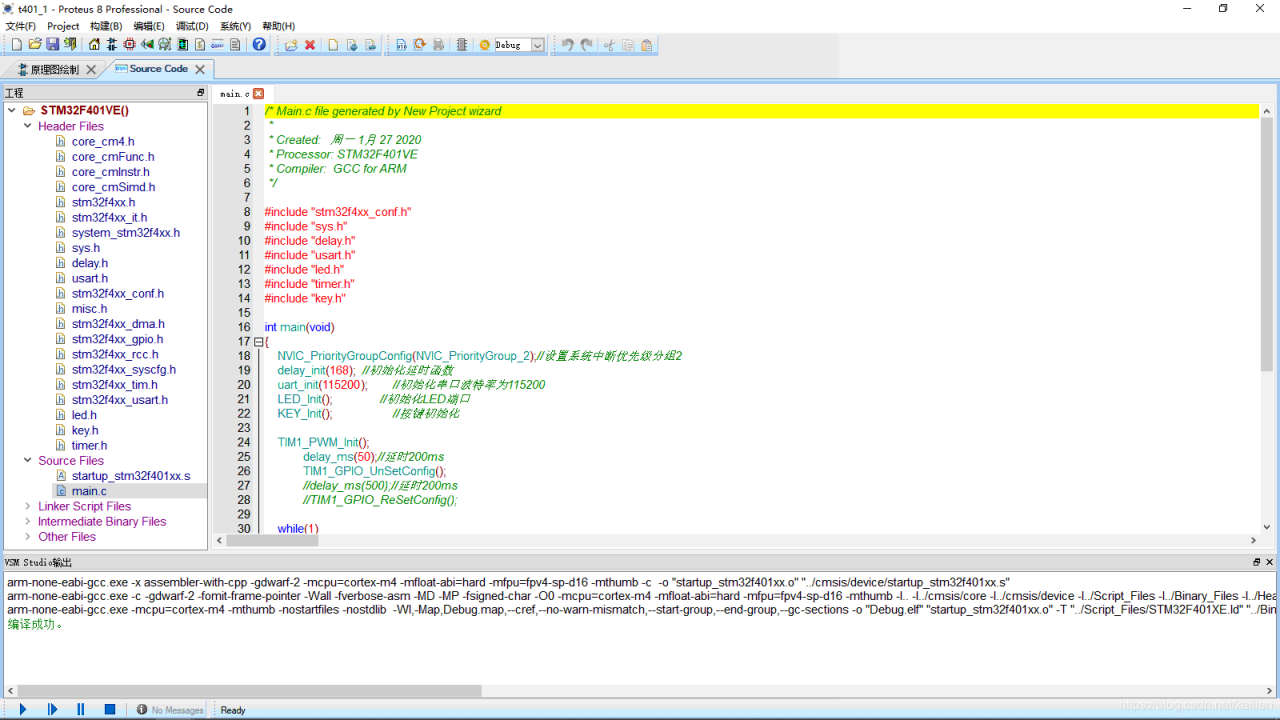
(图6)
用Proteus仿真STM32F401VE的TimerPWM项目(如下图7,8所示)。
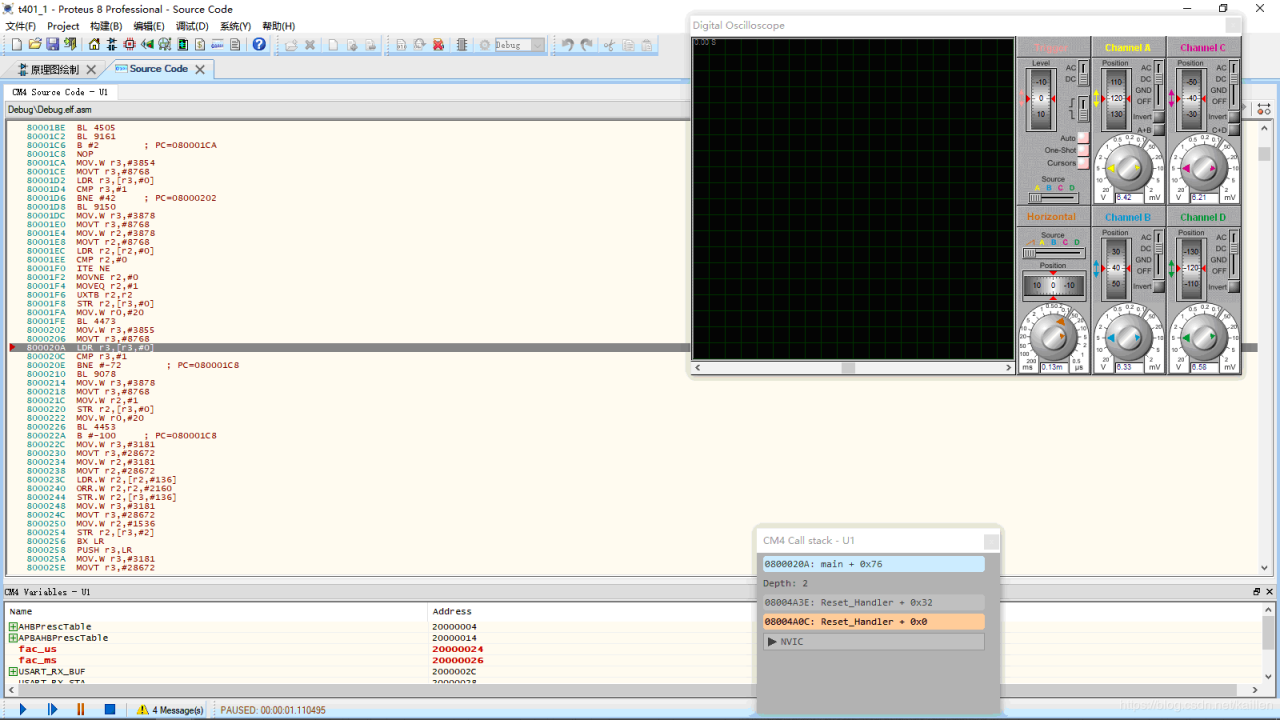
(图7)
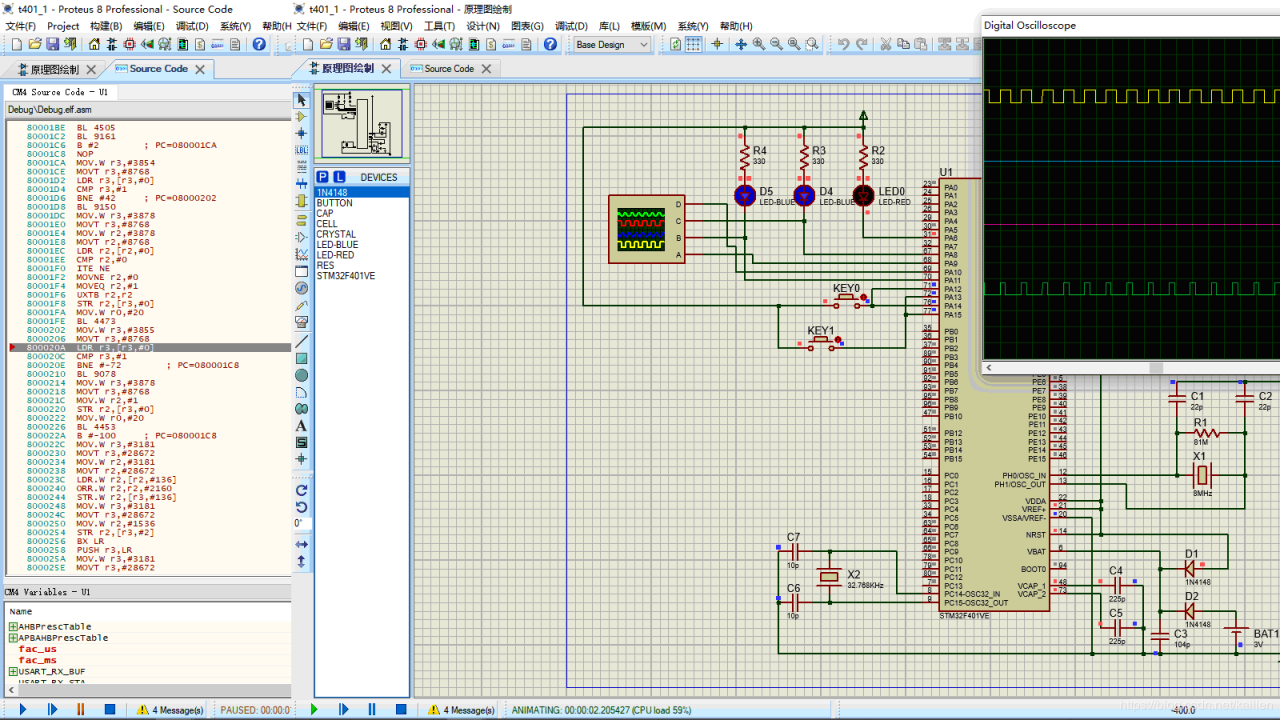
(图8)
按下Key0按钮LED0红灯亮灯(如下图9所示)。
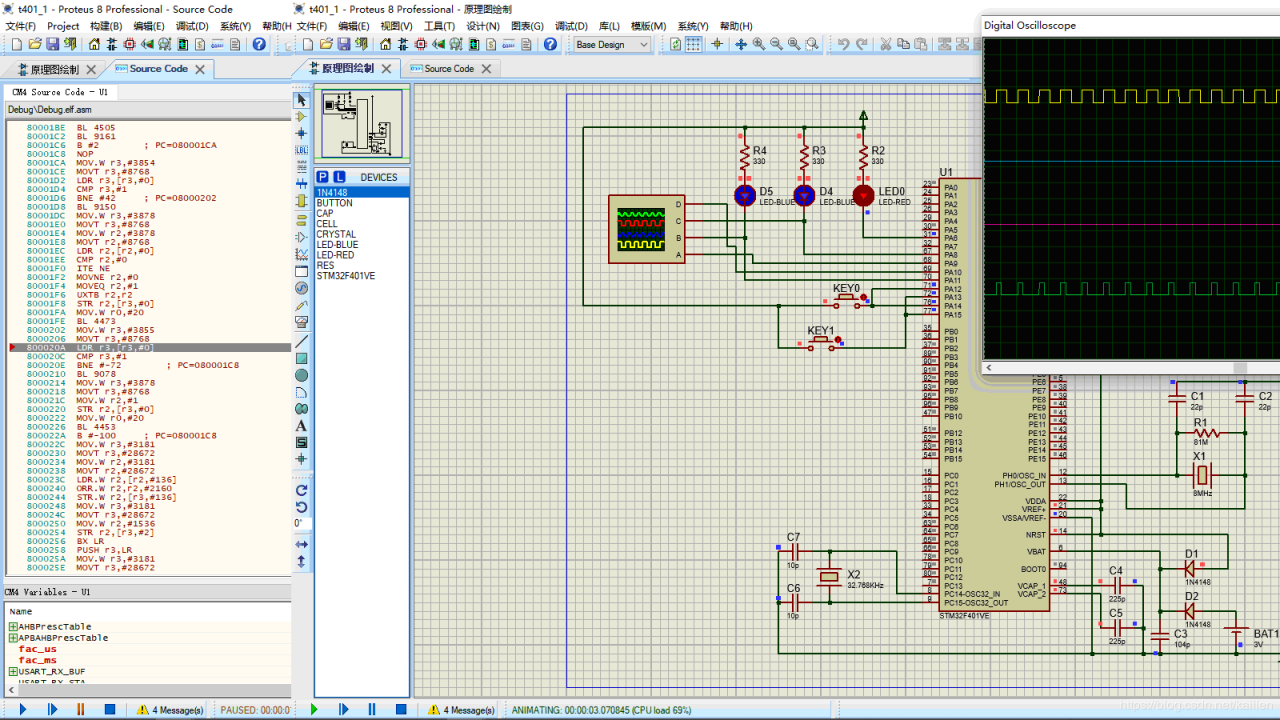
(图9)
二,
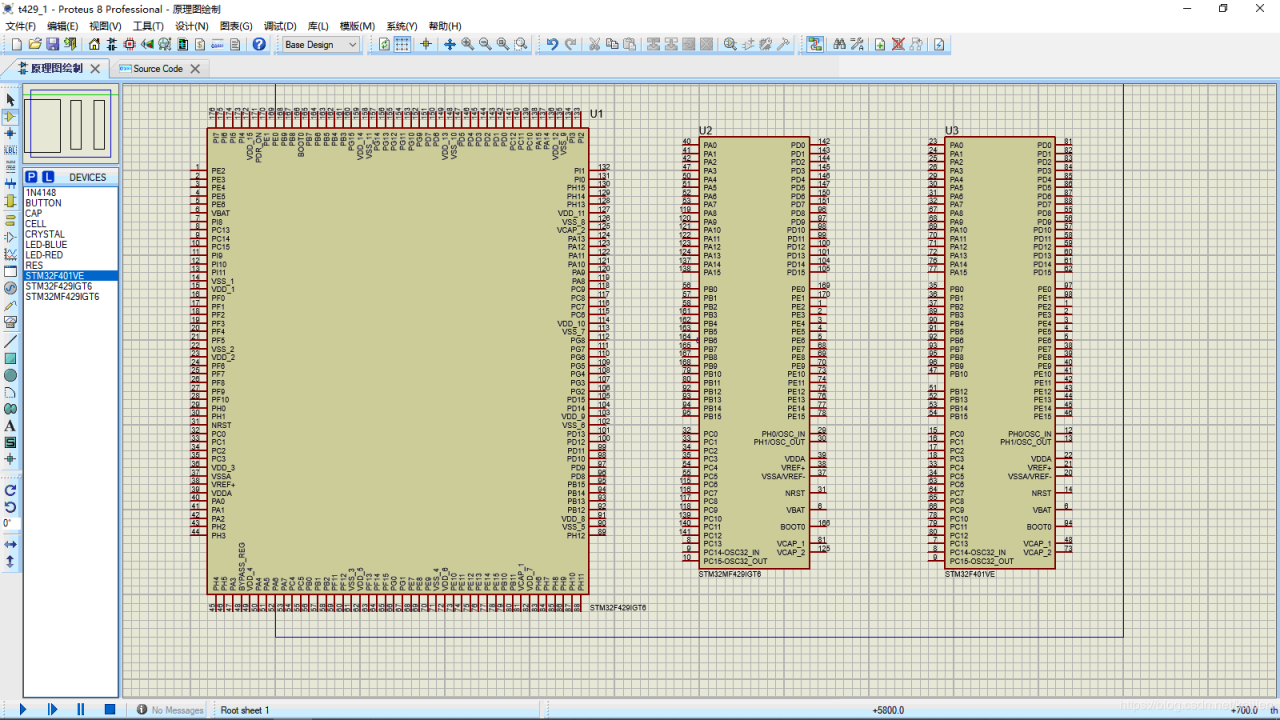
根据原理图制作STM32F407ZGT6的Proteus仿真元件(如下图10,11所示)。
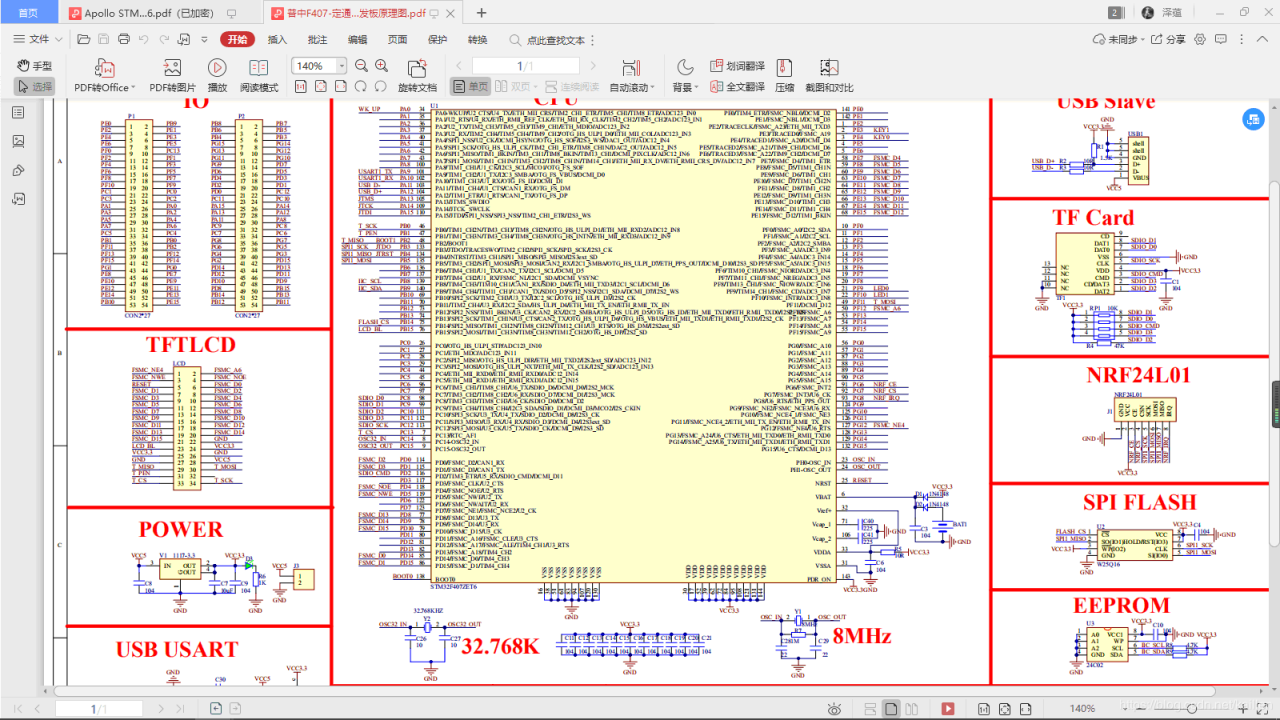
(图10)
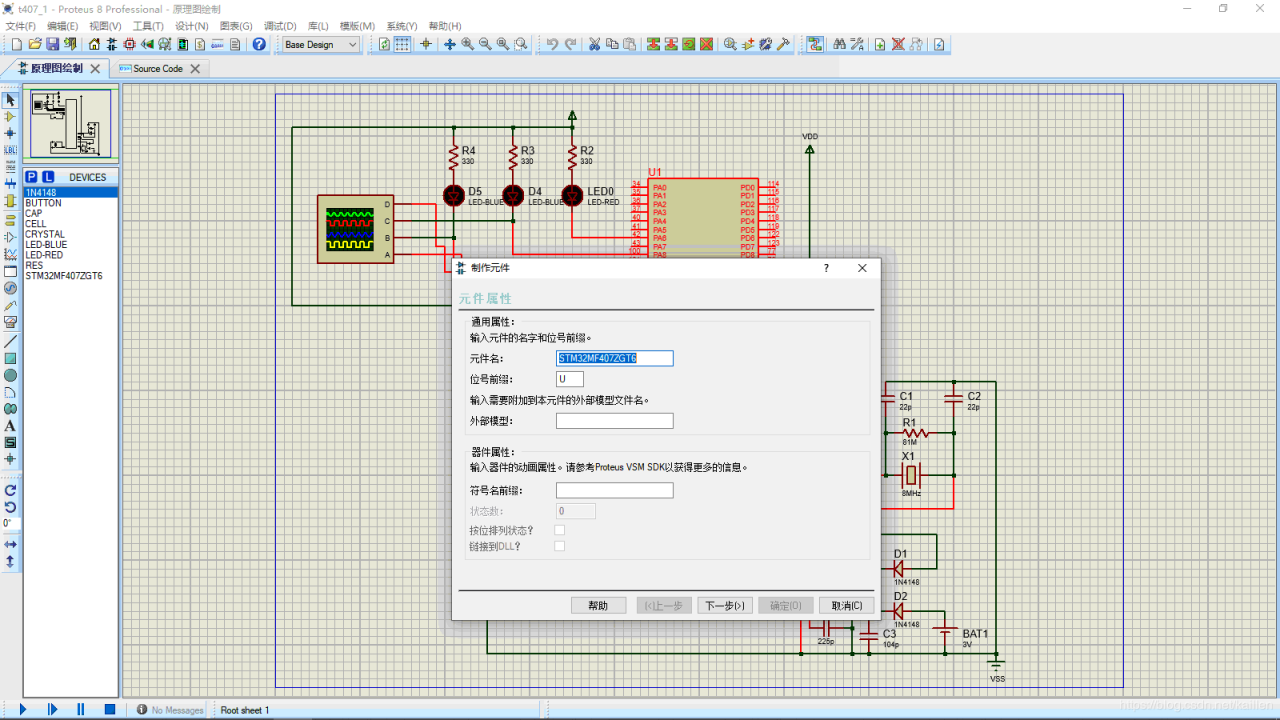
(图11)
由于是在使用STM32F401VE的固件库与STM32F407ZGT6的引脚数和标号不同,需要进行调整(如下图12所示)。
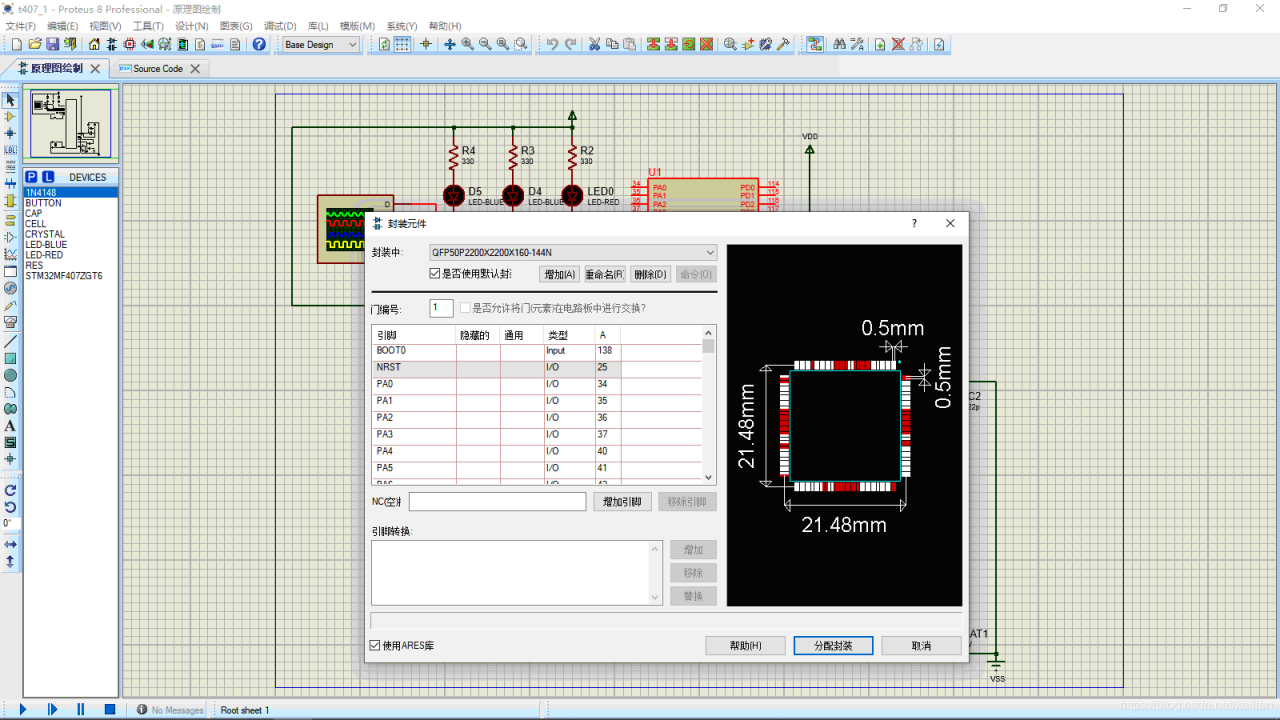
(图12)
为了避免与Proteus以后推出STM32F407ZGT6的固件库冲突,将制作的元件命名为STM32MF407ZGT6。由于是基于STM32F401VE的固件库以及MDF,只支持100Pins。与真的STM32F407ZGT6 相对照,还少了些引脚,和一些功能。,但基础功能仿真是可以满足的(如下图13所示)。
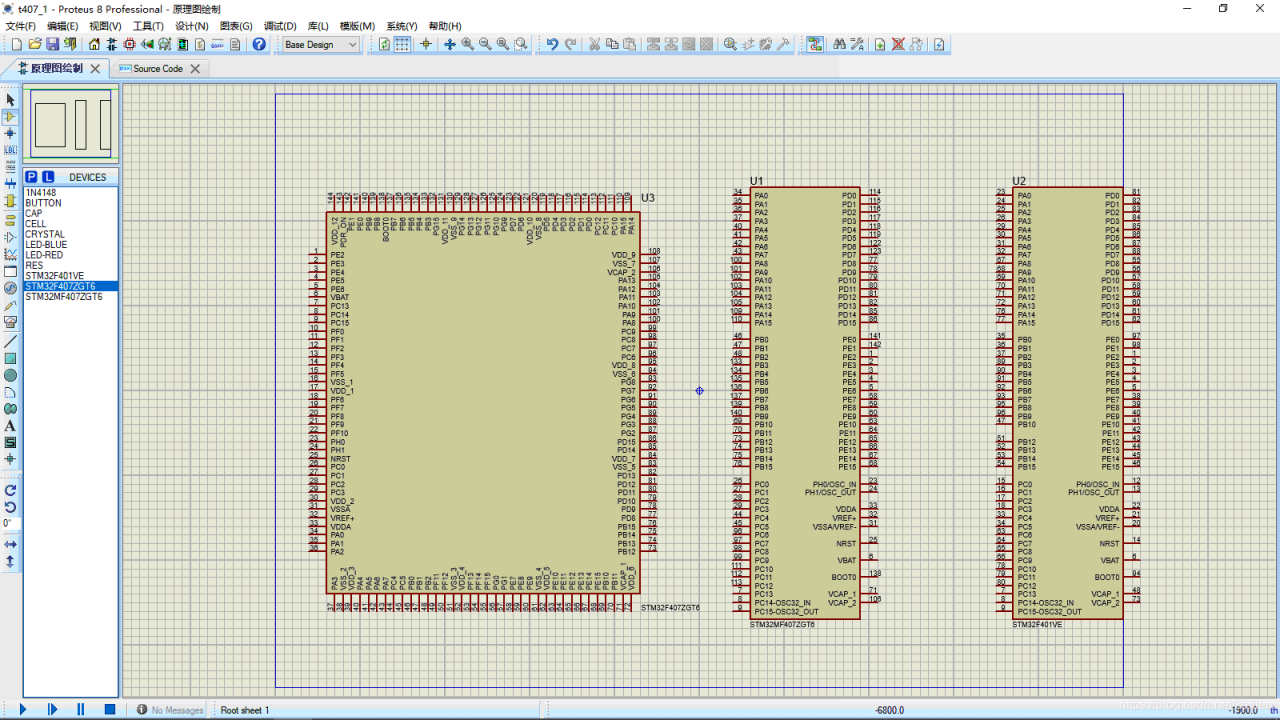
(图13)
用Proteus仿真STM32MF407ZGT6的TimerPWM项目的编程,编译,仿真操作以及显示结果一致。(如下图14所示)。
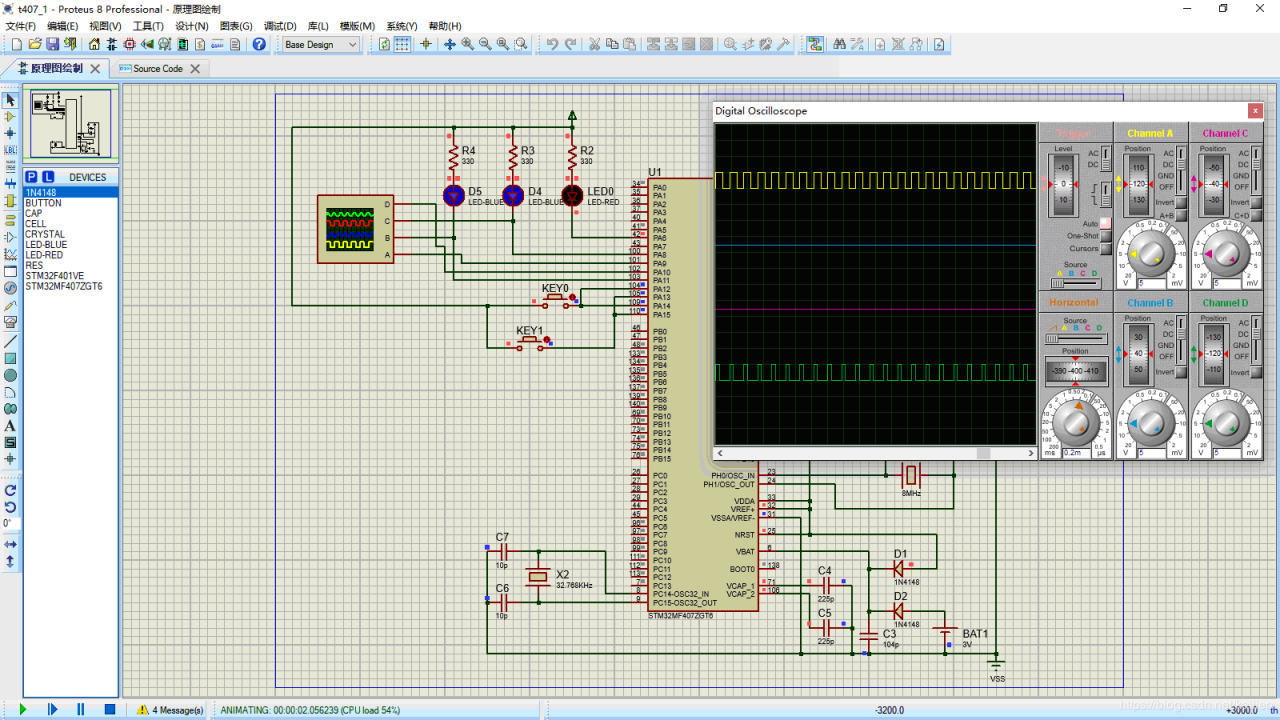
(图14)
三,
根据原理图制作STM32F429IGT6的Proteus仿真元件(如下图15,16所示)。
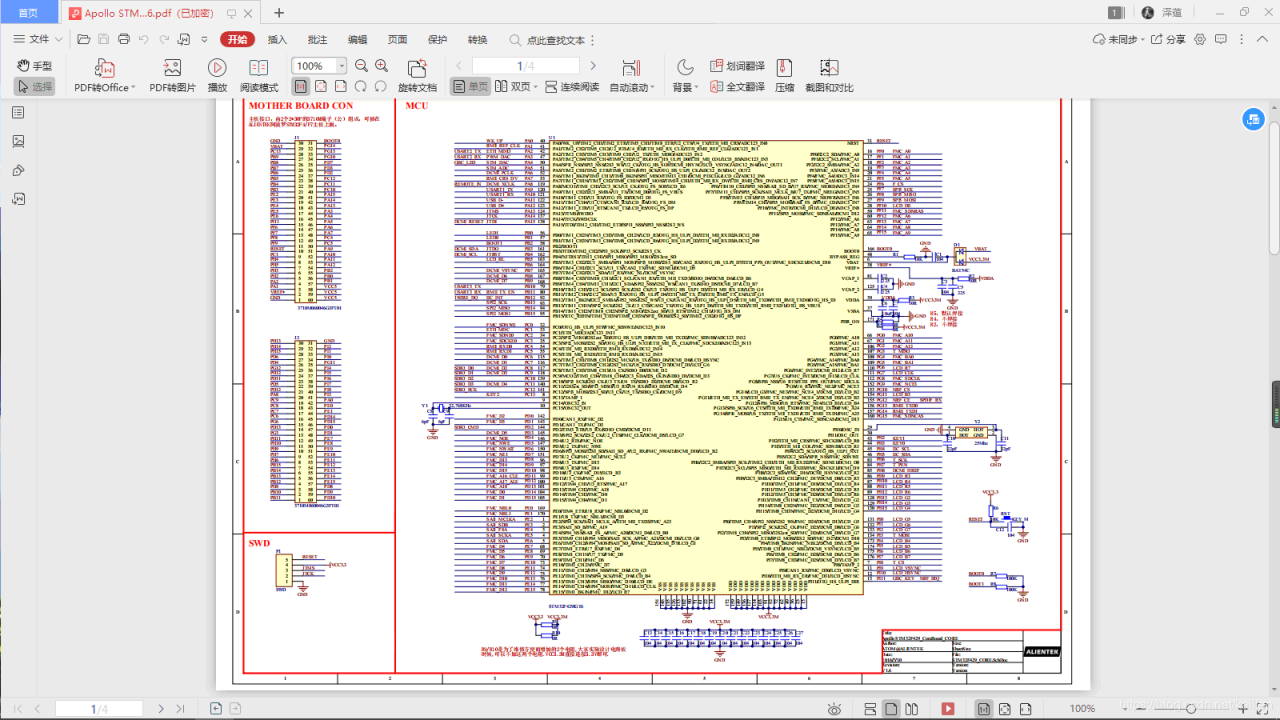
(图15)
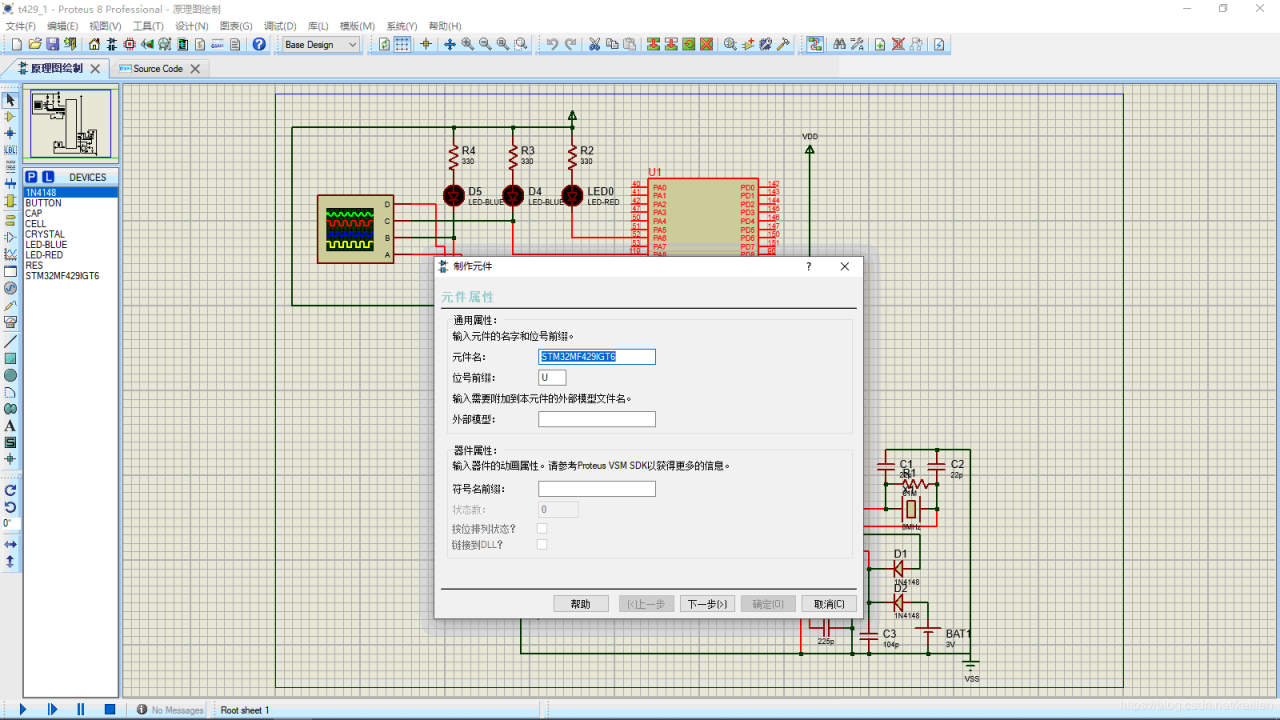
(图16)
由于是在使用STM32F401VE的固件库与STM32F429IGT6的引脚数和标号不同,需要进行调整(如下图17所示)。
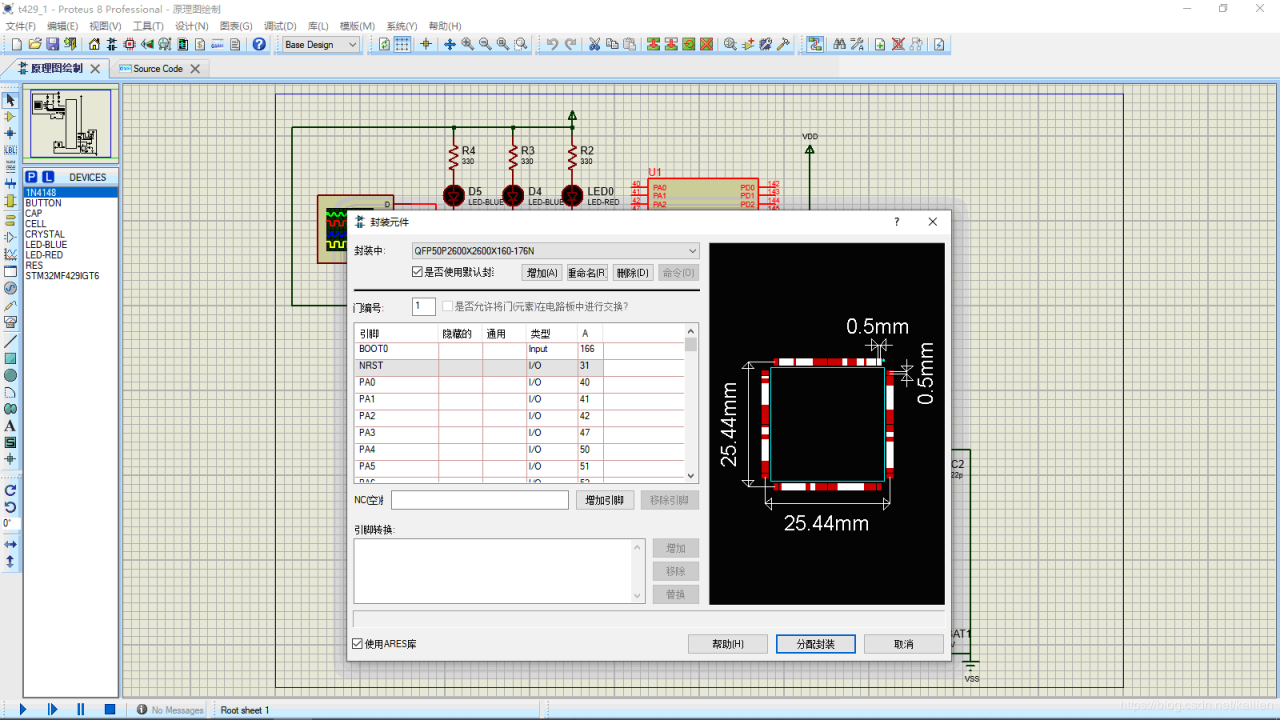
(图17)
为了避免与Proteus以后推出STM32F29IGT6的固件库冲突,将制作的元件命名为STM32MF29IGT6。由于是基于STM32F401VE的固件库以及MDF,只支持100Pins。与真的STM32F29IGT6 相对照,还少了些引脚,和一些功能。,但基础功能仿真是可以满足的(如下图18所示)。
(图18)
用Proteus仿真STM32MF429IGT6的TimerPWM项目的编程,编译,仿真操作以及显示结果一致。(如下图19所示)。
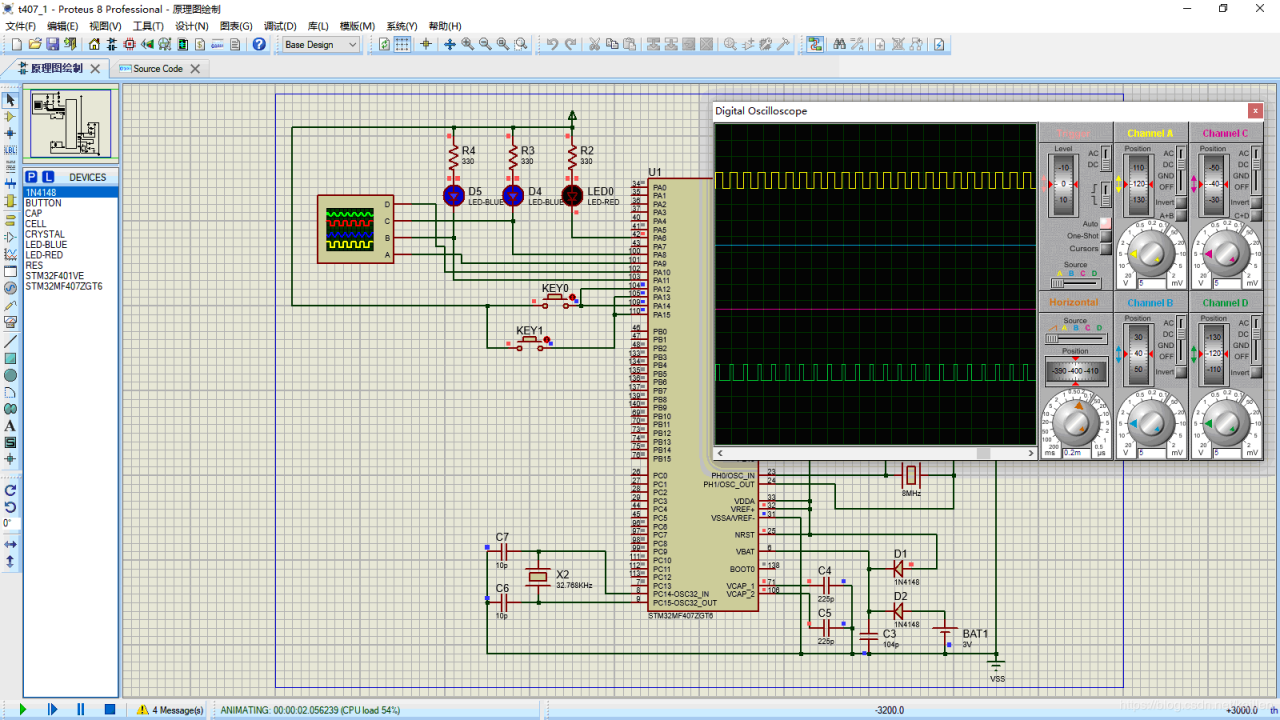
(图19)
需要进一步了解,请加入QQ群:976235464
作者:kaillen