Mac配置pcl
配置直接利用brew install pcl进行安装,我这里安装后是pcl1.9版本,此过程可能需要翻墙。
安装完成利用brew info pcl查看安装情况,如果出现下图,说明安装完成。
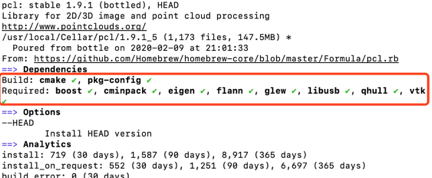
如果某项出现❌,可以利用brew install ***进行重新安装。直到出现上图为止。
pcl实例:
这里以CMakeLists.txt为例:
项目目录:
demo
|__build
|__src
| |__main.cpp
|__CMakeLists.txt
CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(MY_GRAND_PROJECT)
find_package(PCL 1.9 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(pcd_test src/main.cpp)
target_link_libraries(pcd_test ${PCL_LIBRARIES})
main.cpp
// 显示实例
#include
#include
#include
#include
#include
using namespace std;
using namespace pcl;
using namespace io;
int main()
{
PointCloud::Ptr cloud (new PointCloud);
io::loadPCDFile("pcd文件路径", *cloud);
if (cloud==NULL)
{
cerr << "can't read file bunny.pcd" << endl;
return -1;
}
boost::shared_ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
pcl::visualization::PointCloudColorHandlerGenericField fildColor(cloud, "z"); // 按照z字段进行渲染
viewer->addPointCloud(cloud, fildColor, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud"); // 设置点云大小
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return 0;
}
源码下载链接:https://download.csdn.net/download/OEMT_301/12147794
作者:Joemt