自动驾驶:车道线检测、车速检测、实时通行跟踪、基于视频的车辆跟踪及流量统计
 日萌社
日萌社
人工智能AI:Keras PyTorch MXNet TensorFlow PaddlePaddle 深度学习实战(不定时更新)
汽车的日益普及在给人们带来极大便利的同时,也导致了拥堵的交通路况,以及更为频发的交通事故。智能交通技术已成为推动现代技术交通技术发展的重要力量,智能交通不仅能够提供实时的交通路况信息,帮助交通管理者规划管理策略,而且还能优化出行者的出行策略。还可以减轻交通道路的堵塞情况,降低交通事故的发生概率,提高道路运行的安全系数。
本项目分两个模块:
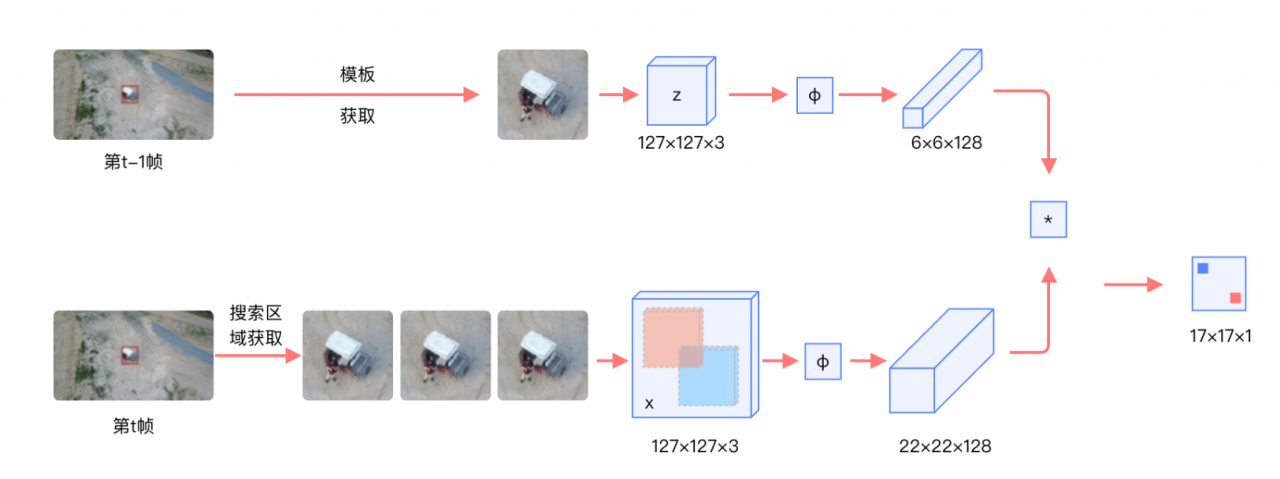
一个是基于视频的车辆跟踪及流量统计,是一个可跟踪路面实时车辆通行状况,并逐帧记录不同行车道车流量数目的深度学习项目,在视频中可看出每个车辆的连续帧路径,该项目可拓展性强,可根据企业业务外接计费结算系统、LED显示系统、语音播报系统、供电防雷系统等,
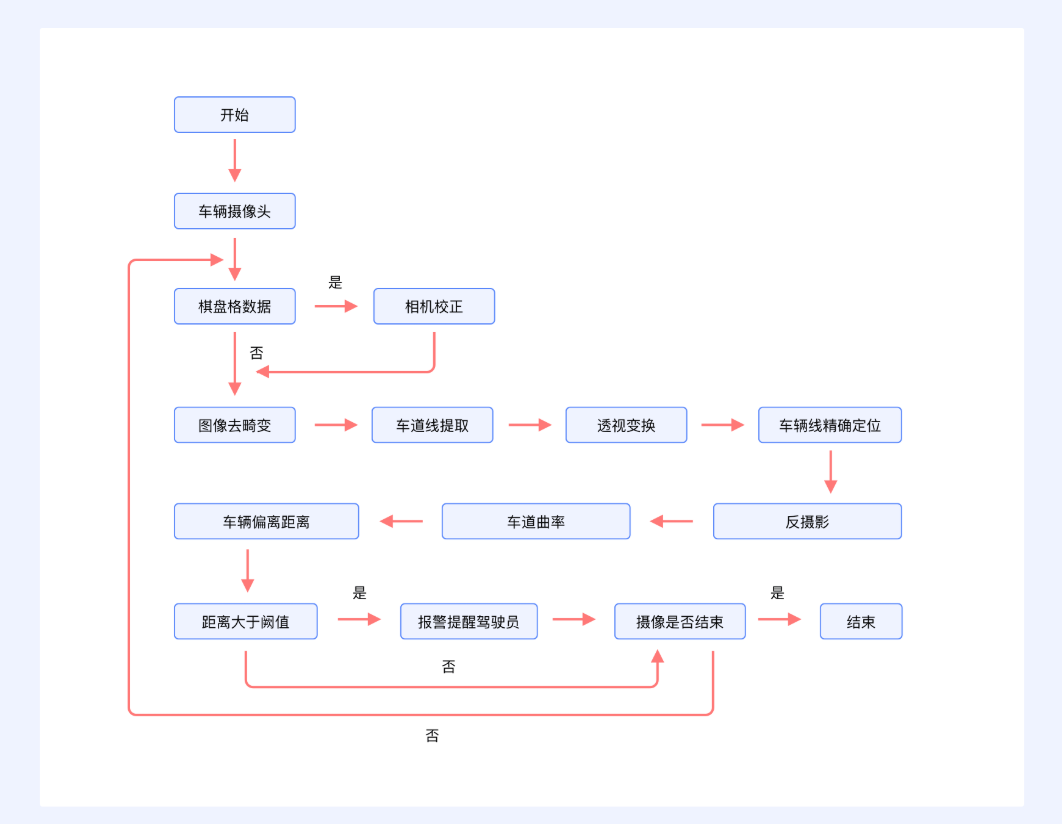
另一个是车道线检测项目,是实现自动驾驶的首要任务,广泛应用于自动驾驶厂家,能够根据车载摄像头的输入,对安全驾驶区域进行预判,提醒驾驶员进行安全驾驶,减少交通事故的发生。
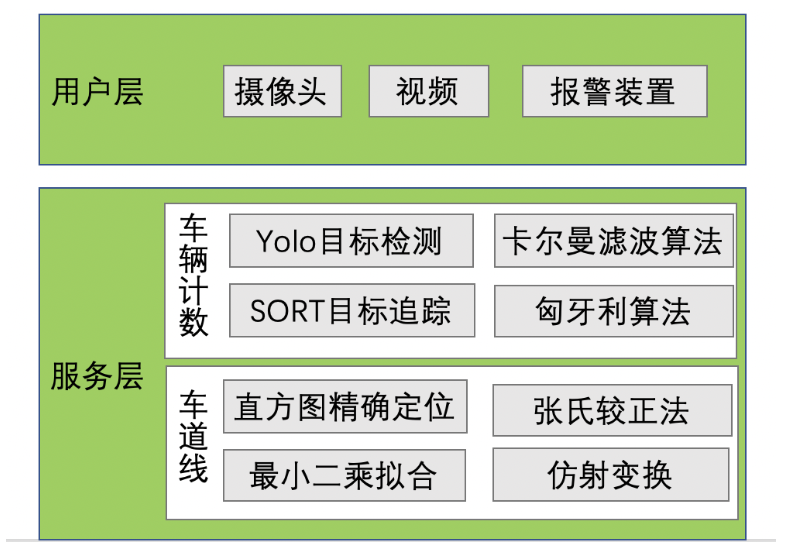
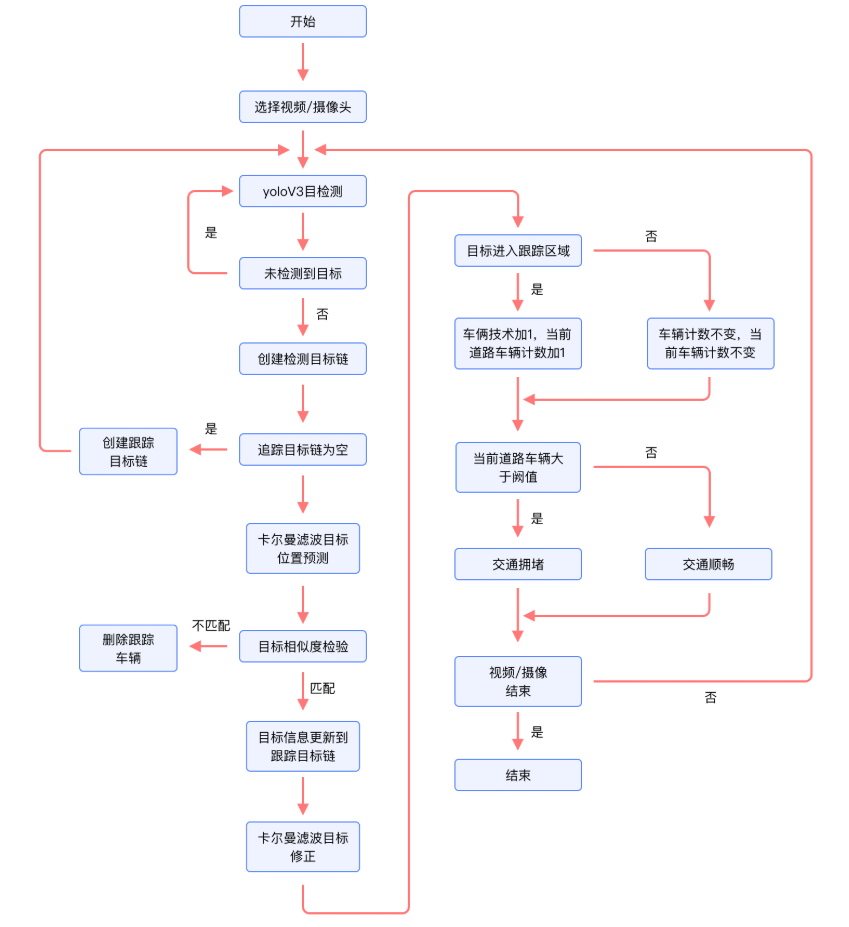
该项目的架构图如下所示:

该项目中使用的工具包包含以下:
NumPy 是使用 Python 进行科学计算的基础包。
Numba 是一个开源 JIT 编译器,它将 Python 和 NumPy 代码的子集转换为快速机器码。
SciPy 是数学、科学和工程的开源软件。SciPy 库依赖于 NumPy,它提供方便快捷的 N 维数组操作。
h5py 从 Python 读取和写入 HDF5文件。
pandas 用于数据分析、时间序列和统计的强大的数据结构。
opencv-python 用于 Python 的预构建 OpenCV 包。
moviepy 用于进行视频处理的工具包
Filterpy 实现了卡尔曼滤波器和粒子滤波器等
具体版本见requirements文件中。
安装方法:
# 创建虚拟环境
conda create -n dlcv python
# 激活虚拟环境
source activate dlcv
# 安装对应的工具包
pip install -r requirements.txt
总结
项目中包含两个模块:多目标车辆跟踪及流量统计和车道线检测
项目分为用户层和服务层,用户层进行视频或摄像头的操作,服务层对视频进行处理,完成多目标车辆的跟踪及车流量的统计和车道线检测
 あずにゃん
あずにゃん
 原创文章 511获赞 171访问量 27万+
关注
私信
展开阅读全文
原创文章 511获赞 171访问量 27万+
关注
私信
展开阅读全文
作者:あずにゃん