蓝桥杯嵌入式第十一届省赛模拟试题
一、问题
作者:fancyZT
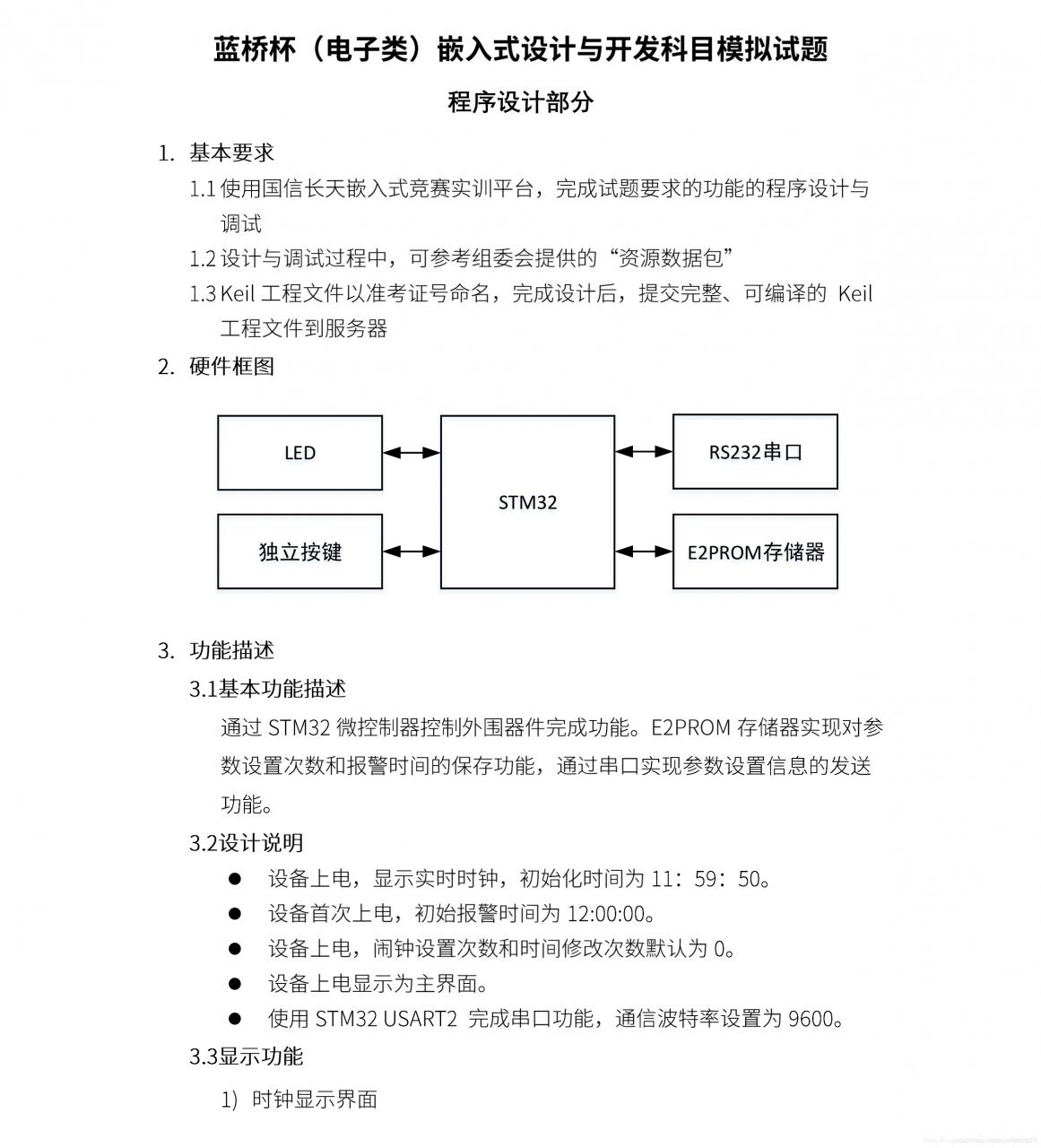
1.初始化相关
tx.c
#include "tx.h"
void LED_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = 0xff00;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIOD->ODR|=(1<ODR|=0xff00;
GPIOD->ODR&=~(1<<2);
}
void KEY_Init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
u8 key_status[4]={1,1,1,1};
u16 key_downtime[4]={0,0,0,0};
void KEY_Driver(void){
u8 i;
static u8 backup[4]={1,1,1,1};
static u16 timethr[4]={1000,1000,1000,1000};
for(i=0;i0) {
if(key_downtime[i]>timethr[i]){
Key_action(i+1,1);
timethr[i]+=200;
}
else
timethr[i]=1000;
}
}
}
void KEY_Scan(void){
u8 i;
static u8 key_buf[4]={0xff,0xff,0xff,0xff};
key_buf[0]=(key_buf[0]<<1)|KEY1;
key_buf[1]=(key_buf[1]<<1)|KEY2;
key_buf[2]=(key_buf[2]<<1)|KEY3;
key_buf[3]=(key_buf[3]<<1)|KEY4;
for(i=0;i<4;i++){
if(key_buf[i]==0x00) {
key_downtime[i]+=4;
key_status[i]=0;
}
else if(key_buf[i]==0xff){
key_downtime[i]=0;
key_status[i]=1;
}
}
}
void Tim4_Init(u16 arr,u16 psc){
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr-1;
TIM_TimeBaseStructure.TIM_Prescaler = psc-1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
/* TIM2 enable counter */
TIM_Cmd(TIM4, ENABLE);
}
void RTC_Init(u8 HH,u8 MM,u8 SS){
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR | RCC_APB1Periph_BKP, ENABLE);
/* Allow access to BKP Domain */
PWR_BackupAccessCmd(ENABLE);
/* Reset Backup Domain */
BKP_DeInit();
/* Enable the LSI OSC */
RCC_LSICmd(ENABLE);
/* Wait till LSI is ready */
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET)
{}
/* Select the RTC Clock Source */
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
/* Enable RTC Clock */
RCC_RTCCLKCmd(ENABLE);
/* Wait for RTC registers synchronization */
RTC_WaitForSynchro();
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
/* Enable the RTC Second */
RTC_ITConfig(RTC_IT_SEC, ENABLE);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
/* Set RTC prescaler: set RTC period to 1sec */
RTC_SetPrescaler(40000-1);
/* Wait until last write operation on RTC registers has finished */
RTC_WaitForLastTask();
RTC_SetCounter(3600*HH+60*MM+SS);
RTC_WaitForLastTask();
}
void Usart2_Init(void){
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USARTy */
USART_Init(USART2, &USART_InitStructure);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_Cmd(USART2, ENABLE);
}
void Send_string(u8 *str){
u8 i=0;
while(str[i]!=0){
USART_SendData(USART2,str[i]);
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE)==0);
i++;
}
}
tx.h
/*
程序说明: CT117E嵌入式竞赛板LCD驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT117E嵌入式竞赛板
日 期: 2011-8-9
*/
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __TX_H
#define __TX_H
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#define KEY1 GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0)
#define KEY2 GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)
#define KEY3 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)
#define KEY4 GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_2)
void LED_Init(void);
void KEY_Init(void);
void KEY_Driver(void);
void KEY_Scan(void);
void Tim4_Init(u16 arr,u16 psc);
void RTC_Init(u8 HH,u8 MM,u8 SS);
void Usart2_Init(void);
void Send_string(u8 *str);
extern void Key_action(int code,int sta);
#endif /* __TX_H */
/******************* (C) COPYRIGHT 2008 STMicroelectronics *****END OF FILE****/
2.i2c.c中增加
void i2c_write(u16 add,u8 data){
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CSendByte(data);
I2CWaitAck();
I2CStop();
}
u8 i2c_read(u16 add){
u8 temp;
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
temp=I2CReceiveByte();
I2CSendAck();
I2CStop();
return temp;
}
3.主文件中:
#include "stm32f10x.h"
#include "lcd.h"
#include "tx.h"
#include "stdio.h"
#include "i2c.h"
u32 TimingDelay = 0;
u8 RXD_flag=0;
u8 RXD_buf[20];
u8 str[20];
u8 i;
u16 time;
u8 hour,min,sec;
u8 t_hour=11,t_min=59,t_sec=50;//设置初始时间
u8 a_hour=12,a_min=0,a_sec=0;//设置闹钟
u8 time_flag=0;//在设置时间时的切换标志
u8 alarm_flag=0;//在设置闹钟时的切换标志
u8 SET_flag=0;//0时钟显示,1时钟设置,2报警设置
u8 KEY1_flag=0; //0是时钟设置,1是切换
u8 KEY2_flag=0; //0是闹钟设置,1是切换
u16 time_count=0; //时间设置次数
u16 alarm_count=0; //报警次数
u8 ms200_flag=1;
u16 LED_MODE=0xffff;
u16 led1_cnt=0;
void Show_real_data(void);
void Show_set_time(void);
void Show_set_alarm(void);
void Led_action(void);
void Usart_action(int i);
void Key_action(int code,int sta);
void In_data(void);
void De_data(void);
void Delay_Ms(u32 nTime);
//Main Body
int main(void)
{
SysTick_Config(SystemCoreClock/1000);
Delay_Ms(200);
STM3210B_LCD_Init();
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
i2c_init();
LED_Init();
KEY_Init();
Tim4_Init(2000,72);
RTC_Init(11,59,50);
Usart2_Init();
time_count=0;
alarm_count=0;
time_count=i2c_read(0x00); Delay_Ms(5);
alarm_count=i2c_read(0x01); Delay_Ms(5);
a_hour=i2c_read(0x02); Delay_Ms(5);
a_min=i2c_read(0x03); Delay_Ms(5);
a_sec=i2c_read(0x04); Delay_Ms(5);
while(1){
KEY_Driver();
if(ms200_flag){
ms200_flag=0;
Led_action();
if(SET_flag==0)
Show_real_data();
else if(SET_flag==1)
Show_set_time();
else if(SET_flag==2)
Show_set_alarm();
}
}
}
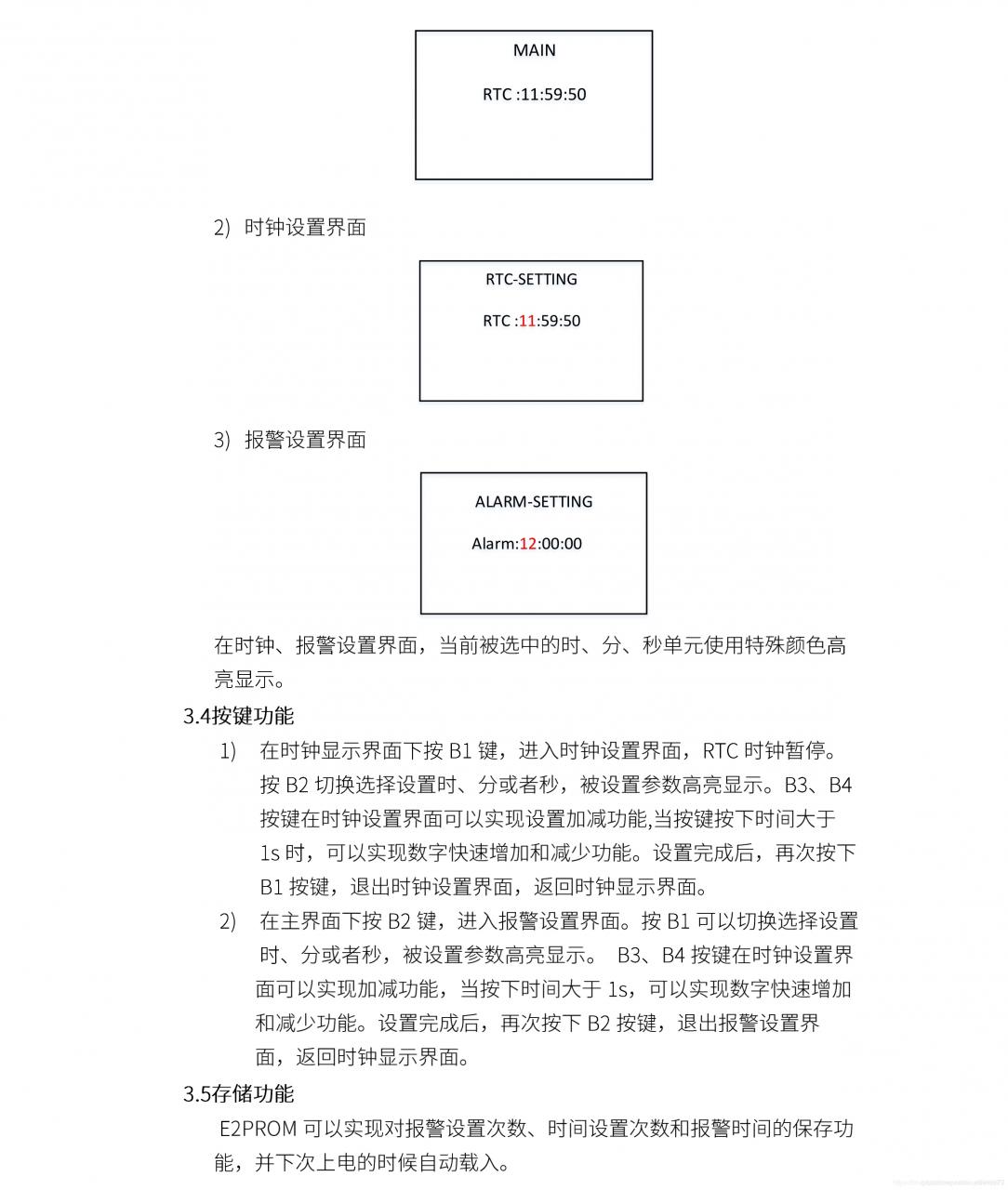
void Show_real_data(void){
sprintf((char*)str," MAIN ");
LCD_DisplayStringLine(Line2, str);
sprintf((char*)str," RTC:");
LCD_DisplayStringLine(Line5, str);
LCD_DisplayChar(Line5, 200,hour/10+'0');
LCD_DisplayChar(Line5, 185,hour%10+'0');
LCD_DisplayChar(Line5, 170,':');
LCD_DisplayChar(Line5, 155,min/10+'0');
LCD_DisplayChar(Line5, 140,min%10+'0');
LCD_DisplayChar(Line5, 125,':');
LCD_DisplayChar(Line5, 110,sec/10+'0');
LCD_DisplayChar(Line5, 95,sec%10+'0');
}
void Show_set_time(void){
sprintf((char*)str," RTC-SETTING ");
LCD_DisplayStringLine(Line2, str);
sprintf((char*)str," RTC:");
LCD_DisplayStringLine(Line5, str);
if(time_flag==0)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 200,t_hour/10+'0');
LCD_DisplayChar(Line5, 185,t_hour%10+'0');
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 170,':');
if(time_flag==1)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 155,t_min/10+'0');
LCD_DisplayChar(Line5, 140,t_min%10+'0');
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 125,':');
if(time_flag==2)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 110,t_sec/10+'0');
LCD_DisplayChar(Line5, 95,t_sec%10+'0');
LCD_SetTextColor(White);
}
void Show_set_alarm(void){
sprintf((char*)str," ALARM-SETTING ");
LCD_DisplayStringLine(Line2, str);
sprintf((char*)str," ALARM:");
LCD_DisplayStringLine(Line5, str);
if(alarm_flag==0)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 200,a_hour/10+'0');
LCD_DisplayChar(Line5, 185,a_hour%10+'0');
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 170,':');
if(alarm_flag==1)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 155,a_min/10+'0');
LCD_DisplayChar(Line5, 140,a_min%10+'0');
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 125,':');
if(alarm_flag==2)
LCD_SetTextColor(Green);
else
LCD_SetTextColor(White);
LCD_DisplayChar(Line5, 110,a_sec/10+'0');
LCD_DisplayChar(Line5, 95,a_sec%10+'0');
LCD_SetTextColor(White);
}
void Led_action(void){
if(SET_flag==0){
led1_cnt++;
if(led1_cnt>=10){
LED_MODE^=(1<ODR=LED_MODE;
GPIO_SetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_10);
GPIOD->ODR|=(1<ODR&=~(1<<2);
led1_cnt=0;
}
}
else if(SET_flag==1){
LED_MODE&=~(1<ODR=LED_MODE;
GPIO_SetBits(GPIOC,GPIO_Pin_8);
GPIO_SetBits(GPIOC,GPIO_Pin_10);
GPIOD->ODR|=(1<ODR&=~(1<<2);
}
else if(SET_flag==2){
LED_MODE&=~(1<ODR=LED_MODE;
GPIO_SetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_8);
GPIOD->ODR|=(1<ODR&=~(1<<2);
}
}
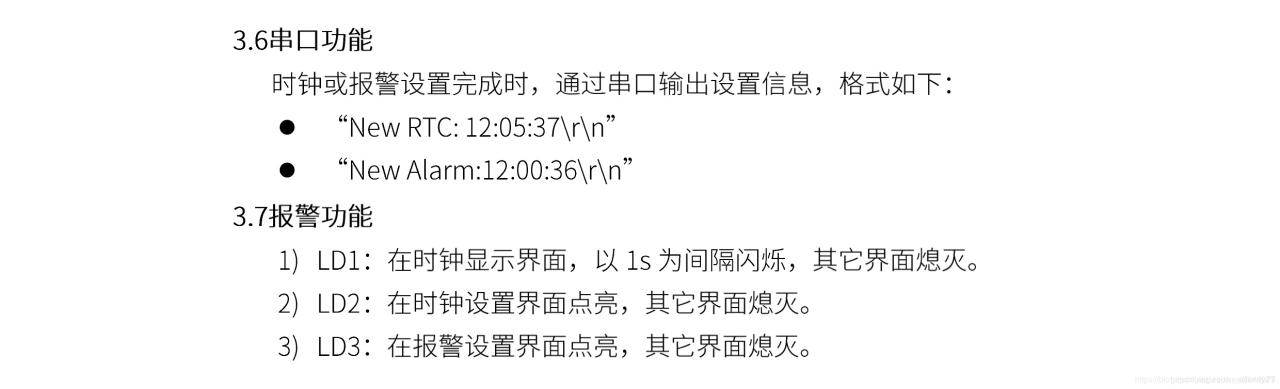
void Usart_action(int i){
if(i==1){
sprintf((char*)str,"New RTC:%.2d:%.2d:%.2d\r\n",t_hour,t_min,t_sec);
Send_string(str);
}
else if(i==2){
sprintf((char*)str,"New Alarm:%.2d:%.2d:%.2d\r\n",a_hour,a_min,a_sec);
Send_string(str);
}
for(i=0;i2)
alarm_flag=0;
}
}
else if(code==2){
if(KEY2_flag==0){ //设置
if(SET_flag==0)
SET_flag=2;
else if(SET_flag==2)
SET_flag=0;
KEY1_flag=1;
if(SET_flag==0){
alarm_count++;
i2c_write(0x01,alarm_count);Delay_Ms(5);
i2c_write(0x02,a_hour);Delay_Ms(5);
i2c_write(0x03,a_min);Delay_Ms(5);
i2c_write(0x04,a_sec);Delay_Ms(5);
//if(RXD_flag){
// RXD_flag=0;
Usart_action(2);
//}
KEY1_flag=0;
}
}
else if(KEY2_flag==1){ //切换闹钟选择
time_flag++;
if(time_flag>2)
time_flag=0;
}
}
}
else if(sta==1){
if(code==3)
In_data();
else if(code==4)
De_data();
}
}
void In_data(void){
if(SET_flag==1){
if(time_flag==0){
t_hour+=1;
if(t_hour>=24)
t_hour=0;
}
else if(time_flag==1){
t_min+=1;
if(t_min>=60)
t_min=0;
}
else if(time_flag==2){
t_sec+=1;
if(t_sec>=60)
t_sec=0;
}
}
else if(SET_flag==2){
if(alarm_flag==0){
a_hour+=1;
if(a_hour>=24)
a_hour=0;
}
else if(alarm_flag==1){
a_min+=1;
if(a_min>=60)
a_min=0;
}
else if(alarm_flag==2){
a_sec+=1;
if(a_sec>=60)
a_sec=0;
}
}
}
void De_data(){
if(SET_flag==1){
if(time_flag==0){
t_hour--;
if(t_hour+1<=0)
t_hour=23;
}
else if(time_flag==1){
t_min--;
if(t_min+1<=0)
t_min=59;
}
else if(time_flag==2){
t_sec--;
if(t_sec+1<=0)
t_sec=0;
}
}
else if(SET_flag==2){
if(alarm_flag==0){
a_hour--;
if(a_hour+1<=0)
a_hour=23;
}
else if(alarm_flag==1){
a_min--;
if(a_min+1<=0)
a_min=59;
}
else if(alarm_flag==2){
a_sec--;
if(a_sec+1<=60)
a_sec=59;
}
}
}
void Delay_Ms(u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
4.中断
stm32f10x_it.c中
void SysTick_Handler(void)
{
TimingDelay--;
}
extern u8 ms200_flag;
void TIM4_IRQHandler(void)
{
static u16 ms200_count=0;
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
ms200_count++;
KEY_Scan();
if(ms200_count>=100){
ms200_count=0;
ms200_flag=1;
}
}
}
extern u16 time;
extern u8 hour,min,sec;
void RTC_IRQHandler(void)
{
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
{
RTC_ClearITPendingBit(RTC_FLAG_SEC);
time=RTC_GetCounter();
if(time==23*3600+59*60+59){
RTC_SetCounter(0);
}
hour=time/3600;
min=time%3600/60;
sec=time%3600%60;
}
}
extern u8 RXD_flag;
extern u8 RXD_buf[20];
u8 RXD_count=0;
void USART2_IRQHandler(void)
{
u16 temp;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){
USART_ClearITPendingBit(USART2, USART_IT_RXNE);
temp=USART_ReceiveData(USART2);
if(temp=='\n'){
RXD_flag=1;
RXD_count=0;
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);
}
else
RXD_buf[RXD_count++]=temp;
}
}
三、总结:
1.功能得到实现,但长短按键效果不是很好。长按的时候增加的太快了,不是每个数都显示。其他的都还好。
2.前期自己做的时候,参考了别人的程序,分成小函数来写,然后调用。思路比较清晰。
四、遇到的问题:
1.三个灯的控制,开一个灯,另外两个灯的状态也需要变,只用位操作会出现问题,试了挺长时间,用了位操作+函数直接置位实现了。
2.串口发送的时候,如果加上串口发送标志的判断,就不一定能显示。去掉之后可以显示。
3.lcd高亮显示,要按字符来操作,因此字符的位置需要确定好。而且界面切换时,可能会显示之前界面的字符。我的方法是这些位置都替换掉,就不会串位了。
作者:fancyZT