#基于yolov3和深度相机的目标检测框架定位系统总结
基于pyqt和yolov3搭建界面
作者:zx96xz
1.首先要了解信号与槽是关键
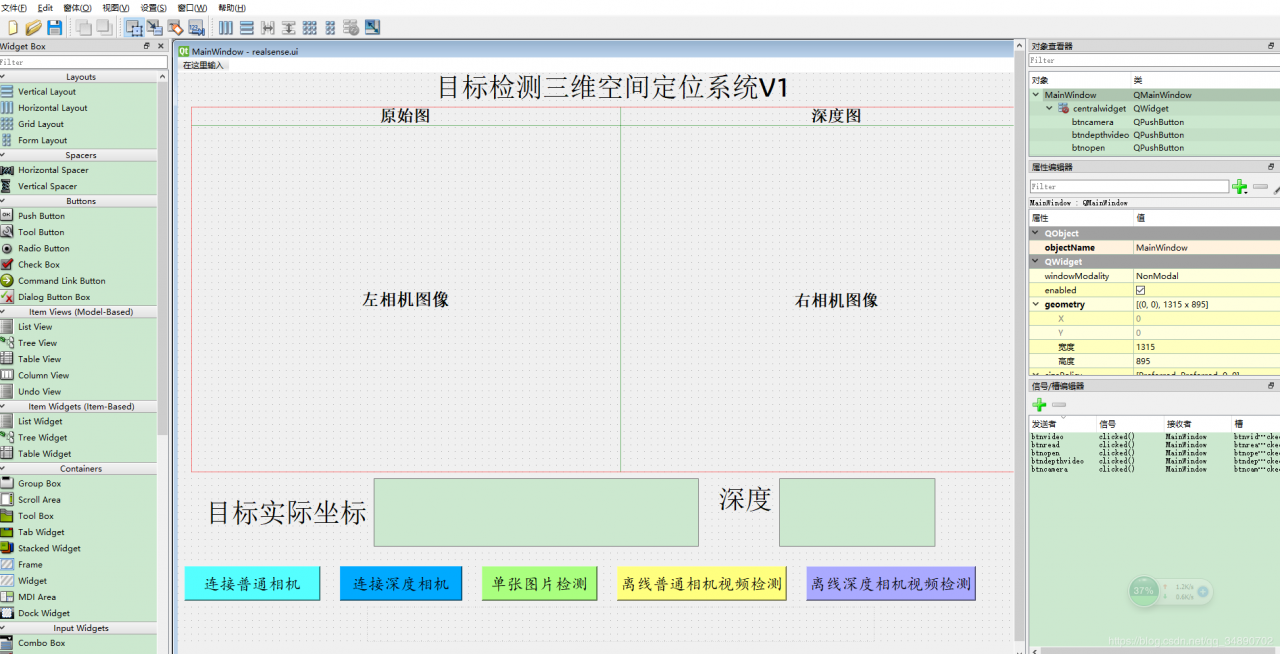
2,参考网上的pyqt安装。将界面文件转换为.py文件
# -*- coding: utf-8 -*-
# Form implementation generated from reading ui file 'realsense.ui'
#
# Created by: PyQt5 UI code generator 5.13.0
#
# WARNING! All changes made in this file will be lost!
from PyQt5 import QtCore, QtGui, QtWidgets
class Ui_MainWindow(object):
def setupUi(self, MainWindow):
MainWindow.setObjectName("MainWindow")
MainWindow.resize(1315, 895)
self.centralwidget = QtWidgets.QWidget(MainWindow)
self.centralwidget.setObjectName("centralwidget")
self.btnopen = QtWidgets.QPushButton(self.centralwidget)
self.btnopen.setGeometry(QtCore.QRect(240, 730, 181, 51))
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Fixed, QtWidgets.QSizePolicy.Fixed)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.btnopen.sizePolicy().hasHeightForWidth())
self.btnopen.setSizePolicy(sizePolicy)
self.btnopen.setStyleSheet("background-color: rgb(0, 170, 255);\n"
"font: 18pt \"楷体\";")
self.btnopen.setObjectName("btnopen")
self.layoutWidget = QtWidgets.QWidget(self.centralwidget)
self.layoutWidget.setGeometry(QtCore.QRect(20, 50, 1271, 541))
self.layoutWidget.setObjectName("layoutWidget")
self.gridLayout = QtWidgets.QGridLayout(self.layoutWidget)
self.gridLayout.setContentsMargins(0, 0, 0, 0)
self.gridLayout.setObjectName("gridLayout")
self.rightlabel = QtWidgets.QLabel(self.layoutWidget)
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Expanding, QtWidgets.QSizePolicy.Expanding)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.rightlabel.sizePolicy().hasHeightForWidth())
self.rightlabel.setSizePolicy(sizePolicy)
font = QtGui.QFont()
font.setPointSize(18)
font.setBold(True)
font.setWeight(75)
self.rightlabel.setFont(font)
self.rightlabel.setAlignment(QtCore.Qt.AlignCenter)
self.rightlabel.setObjectName("rightlabel")
self.gridLayout.addWidget(self.rightlabel, 1, 1, 1, 1)
self.label2 = QtWidgets.QLabel(self.layoutWidget)
font = QtGui.QFont()
font.setPointSize(18)
font.setBold(True)
font.setWeight(75)
self.label2.setFont(font)
self.label2.setAlignment(QtCore.Qt.AlignCenter)
self.label2.setObjectName("label2")
self.gridLayout.addWidget(self.label2, 0, 1, 1, 1)
self.leftlabel = QtWidgets.QLabel(self.layoutWidget)
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Expanding, QtWidgets.QSizePolicy.Expanding)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.leftlabel.sizePolicy().hasHeightForWidth())
self.leftlabel.setSizePolicy(sizePolicy)
font = QtGui.QFont()
font.setPointSize(19)
font.setBold(True)
font.setWeight(75)
self.leftlabel.setFont(font)
self.leftlabel.setAlignment(QtCore.Qt.AlignCenter)
self.leftlabel.setObjectName("leftlabel")
self.gridLayout.addWidget(self.leftlabel, 1, 0, 1, 1)
self.label1 = QtWidgets.QLabel(self.layoutWidget)
font = QtGui.QFont()
font.setPointSize(18)
font.setBold(True)
font.setWeight(75)
self.label1.setFont(font)
self.label1.setAlignment(QtCore.Qt.AlignCenter)
self.label1.setObjectName("label1")
self.gridLayout.addWidget(self.label1, 0, 0, 1, 1)
self.textEdit1 = QtWidgets.QTextEdit(self.centralwidget)
self.textEdit1.setGeometry(QtCore.QRect(290, 600, 481, 101))
self.textEdit1.setStyleSheet("font: 24pt \"3ds\";")
self.textEdit1.setObjectName("textEdit1")
self.label = QtWidgets.QLabel(self.centralwidget)
self.label.setGeometry(QtCore.QRect(40, 620, 241, 61))
self.label.setStyleSheet("font: 30pt \"3ds\";")
self.label.setObjectName("label")
self.btncamera = QtWidgets.QPushButton(self.centralwidget)
self.btncamera.setGeometry(QtCore.QRect(10, 730, 201, 51))
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Fixed, QtWidgets.QSizePolicy.Fixed)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.btncamera.sizePolicy().hasHeightForWidth())
self.btncamera.setSizePolicy(sizePolicy)
self.btncamera.setStyleSheet("background-color: rgb(85, 255, 255);\n"
"font: 18pt \"楷体\";")
self.btncamera.setObjectName("btncamera")
self.label_2 = QtWidgets.QLabel(self.centralwidget)
self.label_2.setGeometry(QtCore.QRect(800, 600, 101, 61))
self.label_2.setStyleSheet("font: 30pt \"3ds\";")
self.label_2.setObjectName("label_2")
self.textEdit2 = QtWidgets.QTextEdit(self.centralwidget)
self.textEdit2.setGeometry(QtCore.QRect(890, 600, 231, 101))
self.textEdit2.setStyleSheet("font: 24pt \"3ds\";")
self.textEdit2.setObjectName("textEdit2")
self.label_3 = QtWidgets.QLabel(self.centralwidget)
self.label_3.setGeometry(QtCore.QRect(380, 0, 551, 41))
self.label_3.setStyleSheet("font: 30pt \"3ds\";")
self.label_3.setObjectName("label_3")
self.splitter = QtWidgets.QSplitter(self.centralwidget)
self.splitter.setGeometry(QtCore.QRect(280, 790, 751, 52))
self.splitter.setOrientation(QtCore.Qt.Horizontal)
self.splitter.setObjectName("splitter")
self.label_time = QtWidgets.QLabel(self.splitter)
self.label_time.setStyleSheet("font: 30pt \"3ds\";\n"
"color: rgb(0, 0, 0);")
self.label_time.setText("")
self.label_time.setObjectName("label_time")
self.btnread = QtWidgets.QPushButton(self.centralwidget)
self.btnread.setGeometry(QtCore.QRect(450, 730, 171, 51))
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Fixed, QtWidgets.QSizePolicy.Fixed)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.btnread.sizePolicy().hasHeightForWidth())
self.btnread.setSizePolicy(sizePolicy)
self.btnread.setStyleSheet("background-color: rgb(170, 255, 127);\n"
"font: 18pt \"楷体\";")
self.btnread.setObjectName("btnread")
self.btnvideo = QtWidgets.QPushButton(self.centralwidget)
self.btnvideo.setGeometry(QtCore.QRect(650, 730, 251, 51))
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Fixed, QtWidgets.QSizePolicy.Fixed)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.btnvideo.sizePolicy().hasHeightForWidth())
self.btnvideo.setSizePolicy(sizePolicy)
self.btnvideo.setStyleSheet("background-color: rgb(255, 255, 127);\n"
"font: 18pt \"楷体\";")
self.btnvideo.setObjectName("btnvideo")
self.btndepthvideo = QtWidgets.QPushButton(self.centralwidget)
self.btndepthvideo.setGeometry(QtCore.QRect(930, 730, 251, 51))
sizePolicy = QtWidgets.QSizePolicy(QtWidgets.QSizePolicy.Fixed, QtWidgets.QSizePolicy.Fixed)
sizePolicy.setHorizontalStretch(0)
sizePolicy.setVerticalStretch(0)
sizePolicy.setHeightForWidth(self.btndepthvideo.sizePolicy().hasHeightForWidth())
self.btndepthvideo.setSizePolicy(sizePolicy)
self.btndepthvideo.setStyleSheet("background-color: rgb(170, 170, 255);\n"
"font: 18pt \"楷体\";")
self.btndepthvideo.setObjectName("btndepthvideo")
MainWindow.setCentralWidget(self.centralwidget)
self.menubar = QtWidgets.QMenuBar(MainWindow)
self.menubar.setGeometry(QtCore.QRect(0, 0, 1315, 23))
self.menubar.setObjectName("menubar")
MainWindow.setMenuBar(self.menubar)
self.statusbar = QtWidgets.QStatusBar(MainWindow)
self.statusbar.setObjectName("statusbar")
MainWindow.setStatusBar(self.statusbar)
self.retranslateUi(MainWindow)
self.btnopen.clicked.connect(MainWindow.btnopen_clicked)
self.btnread.clicked.connect(MainWindow.btnread_clicked)
self.btncamera.clicked.connect(MainWindow.btncamera_clicked)
self.btnvideo.clicked.connect(MainWindow.btnvideo_clicked)
self.btndepthvideo.clicked.connect(MainWindow.btndepthvideo_clicked)
QtCore.QMetaObject.connectSlotsByName(MainWindow)
def retranslateUi(self, MainWindow):
_translate = QtCore.QCoreApplication.translate
MainWindow.setWindowTitle(_translate("MainWindow", "MainWindow"))
self.btnopen.setText(_translate("MainWindow", "连接深度相机"))
self.rightlabel.setText(_translate("MainWindow", "右相机图像"))
self.label2.setText(_translate("MainWindow", "深度图"))
self.leftlabel.setText(_translate("MainWindow", "左相机图像"))
self.label1.setText(_translate("MainWindow", "原始图"))
self.label.setText(_translate("MainWindow", "目标实际坐标"))
self.btncamera.setText(_translate("MainWindow", "连接普通相机"))
self.label_2.setText(_translate("MainWindow", "深度"))
self.label_3.setText(_translate("MainWindow", "目标检测三维空间定位系统V1"))
self.btnread.setText(_translate("MainWindow", "单张图片检测"))
self.btnvideo.setText(_translate("MainWindow", "离线普通相机视频检测"))
self.btndepthvideo.setText(_translate("MainWindow", "离线深度相机视频检测"))
3.基于yolov3的代码我就不贴,主要是基于我们检测目标,要主要返回值
```cpp
import os
import numpy as np
import copy
import colorsys
from timeit import default_timer as timer
from keras import backend as K
from keras.models import load_model
from keras.layers import Input
from PIL import Image, ImageFont, ImageDraw
from nets.yolo3 import yolo_body,yolo_eval
from utils.utils import letterbox_image
class YOLO(object):
_defaults = {
"model_path": 'model_data/yolo.h5',
"anchors_path": 'model_data/yolo_anchors.txt',
"classes_path": 'model_data/coco_classes.txt',
"score" : 0.5,
"iou" : 0.3,
"model_image_size" : (416, 416)
}
@classmethod
def get_defaults(cls, n):
if n in cls._defaults:
return cls._defaults[n]
else:
return "Unrecognized attribute name '" + n + "'"
#---------------------------------------------------#
# 初始化yolo
#---------------------------------------------------#
def __init__(self, **kwargs):
self.__dict__.update(self._defaults)
self.class_names = self._get_class()
self.anchors = self._get_anchors()
self.sess = K.get_session()
self.boxes, self.scores, self.classes = self.generate()
#---------------------------------------------------#
# 获得所有的分类
#---------------------------------------------------#
def _get_class(self):
classes_path = os.path.expanduser(self.classes_path)
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
#---------------------------------------------------#
# 获得所有的先验框
#---------------------------------------------------#
def _get_anchors(self):
anchors_path = os.path.expanduser(self.anchors_path)
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
#---------------------------------------------------#
# 获得所有的分类
#---------------------------------------------------#
def generate(self):
model_path = os.path.expanduser(self.model_path)
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'
# 计算anchor数量
num_anchors = len(self.anchors)
num_classes = len(self.class_names)
# 载入模型,如果原来的模型里已经包括了模型结构则直接载入。
# 否则先构建模型再载入
try:
self.yolo_model = load_model(model_path, compile=False)
except:
self.yolo_model = yolo_body(Input(shape=(None,None,3)), num_anchors//3, num_classes)
self.yolo_model.load_weights(self.model_path)
else:
assert self.yolo_model.layers[-1].output_shape[-1] == \
num_anchors/len(self.yolo_model.output) * (num_classes + 5), \
'Mismatch between model and given anchor and class sizes'
print('{} model, anchors, and classes loaded.'.format(model_path))
# 画框设置不同的颜色
hsv_tuples = [(x / len(self.class_names), 1., 1.)
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
# 打乱颜色
np.random.seed(10101)
np.random.shuffle(self.colors)
np.random.seed(None)
self.input_image_shape = K.placeholder(shape=(2, ))
boxes, scores, classes = yolo_eval(self.yolo_model.output, self.anchors,
num_classes, self.input_image_shape,
score_threshold=self.score, iou_threshold=self.iou)
return boxes, scores, classes
#---------------------------------------------------#
# 检测图片
#---------------------------------------------------#
def detect_image(self, image):
start = timer()
# 调整图片使其符合输入要求
new_image_size = (self.model_image_size[0],self.model_image_size[1])
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
image_data /= 255.
image_data = np.expand_dims(image_data, 0) # Add batch dimension.
# 预测结果
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
feed_dict={
self.yolo_model.input: image_data,
self.input_image_shape: [image.size[1], image.size[0]],
K.learning_phase(): 0
})
print('Found {} boxes for {}'.format(len(out_boxes), 'img'))
# 设置字体
font = ImageFont.truetype(font='font/simhei.ttf',
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32'))
thickness = (image.size[0] + image.size[1]) // 300
small_pic=[]
for i, c in list(enumerate(out_classes)):
predicted_class = self.class_names[c]
box = out_boxes[i]
score = out_scores[i]
top, left, bottom, right = box
top = top - 5
left = left - 5
bottom = bottom + 5
right = right + 5
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
# 画框框
label = '{} {:.2f}'.format(predicted_class, score)
draw = ImageDraw.Draw(image)
label_size = draw.textsize(label, font)
label = label.encode('utf-8')
print(label)
if top - label_size[1] >= 0:
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
for i in range(thickness):
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle(
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, str(label,'UTF-8'), fill=(0, 0, 0), font=font)
del draw
fruitx = (left + right) / 2
fruity = (top + bottom) / 2
end = timer()
print(end - start)
# print(i)
return image,fruitx,fruity########这个·是·重点,返回主要数组迭代
def close_session(self):
self.sess.close()
4.我这里就只贴深度相机打开的界面,要主要相机内参,其他的文件我就不贴了,应该可以复现
import sys
import cv2
from PyQt5 import QtCore, QtGui, QtWidgets
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from PyQt5.QtWidgets import QFileDialog, QMainWindow
from realsense import Ui_MainWindow
import pyrealsense2 as rs
import numpy as np
from keras.layers import Input
from yolo import YOLO
from PIL import Image
from nets.yolo3 import yolo_body
from keras.layers import Input
yolo = YOLO()
class fruit(QMainWindow, Ui_MainWindow):
def __init__(self):
super().__init__()
self.setupUi(self)
self.setWindowTitle('目标检测三维空间定位系统V1')
self.setWindowIcon(QIcon('fruit.jpg')) # 设置窗体标题图标
self.Timer = QTimer() # 自定义QTimer
self.Timer.start(500) # 每0.5秒运行一次
self.Timer.timeout.connect(self.updateTime) # 连接updateTime
# 设置窗口背景图片
# self.setStyleSheet("#MainWindow{border-image:url(fruit.jpg);}")
def updateTime(self):
self.label_time.setText(QDateTime.currentDateTime().toString('yyyy-MM-dd hh:mm:ss dddd')) # 显示时间的格式
self.label_time.setWordWrap(True) # 让图片自适应label大小
##打开深度相机
def btnopen_clicked(self):
pipeline = rs.pipeline()
cfg = rs.config()
cfg.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
cfg.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
# 设定需要对齐的方式(这里是深度对齐彩色,彩色图不变,深度图变换)
profile = pipeline.start(cfg)
depth_sensor = profile.get_device().first_depth_sensor()
depth_scale = depth_sensor.get_depth_scale()
align_to = rs.stream.color
# 设定需要对齐的方式(这里是彩色对齐深度,深度图不变,彩色图变换)
# align_to = rs.stream.depth
alignedFs = rs.align(align_to)
# profile = pipeline.start(cfg)
try:
while True:
fs = pipeline.wait_for_frames()
self.aligned_frames = alignedFs.process(fs)
self.color_frame = self.aligned_frames.get_color_frame()
self.depth_frame = self.aligned_frames.get_depth_frame()
if not self.depth_frame or not self.color_frame:
continue
self.color_image = np.asanyarray(self.color_frame.get_data())
print(type(self.color_image))
self.depth_image = np.asanyarray(self.depth_frame.get_data())
self.depth_image = cv2.applyColorMap(cv2.convertScaleAbs(self.depth_image, alpha=0.03), cv2.COLORMAP_JET)
self.images = np.hstack((self.color_image, self.depth_image))
# 获取颜色帧内参
color_profile = self.color_frame.get_profile()
cvsprofile = rs.video_stream_profile(color_profile)
color_intrin = cvsprofile.get_intrinsics()
color_intrin_part = [color_intrin.ppx, color_intrin.ppy, color_intrin.fx, color_intrin.fy]
# print(color_intrin_part)
# 转变成Image
self.color_image = Image.fromarray(np.uint8(self.color_image))
# 进行检测
self.color_image1 = np.array(yolo.detect_image(self.color_image)[0])
fruit_x=np.array(yolo.detect_image(self.color_image)[1])
fruit_y = np.array(yolo.detect_image(self.color_image)[2])
# 显示深度
fruit_depth = self.depth_frame.get_distance(int(fruit_x), int(fruit_y))
# 坐标系变换
fruit_x_true=round((fruit_x-color_intrin_part[0])*fruit_depth /color_intrin_part[2],4)
fruit_y_true =round((fruit_y - color_intrin_part[1]) * fruit_depth / color_intrin_part[3],4)
target=[fruit_x_true,fruit_y_true]
# cv2.imshow('window', self.color_image1)
height, width, channel = self.color_image1.shape
bytesPerline = 3 * width
self.left = QImage(self.color_image1.data, width, height, bytesPerline,
QImage.Format_RGB888).rgbSwapped()
# 将QImage显示出来
self.label.setText("目标实际坐标")
self.label2.setText("深度图")
self.leftlabel.setPixmap(QPixmap.fromImage(self.left))
self.leftlabel.setScaledContents(True) # 让图片自适应label大小
self.right = QImage(self.depth_image.data, width, height, bytesPerline,
QImage.Format_RGB888).rgbSwapped()
self.rightlabel.setPixmap(QPixmap.fromImage(self.right))
self.rightlabel.setScaledContents(True) # 让图片自适应label大小
self.textEdit1.setPlainText(str(target))
self.textEdit2.setPlainText(str(round(fruit_depth, 4)))
cv2.waitKey(1)
finally:
pipeline.stop()
5.效果图(这里打码,疫情在家,只能用别人训练的数据模型测试了,回实验室可以训练自己模型测试)
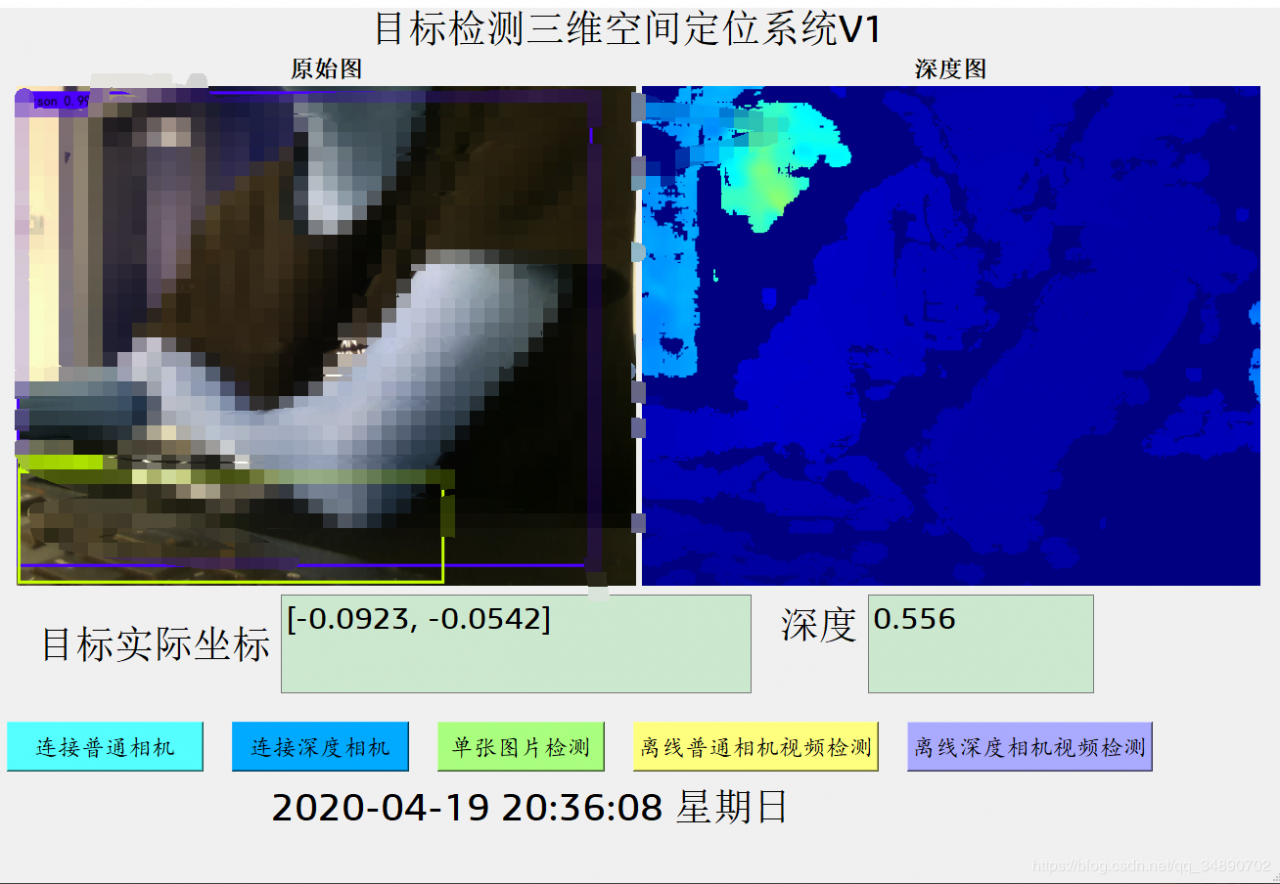
作者:zx96xz