读取.bin激光雷达点云文件格式并可视化三种的方法
申明:从KITTI官网下载到的激光雷达点云数据为.bin格式,为此找到了三种方法,现在分享出来大家一起讨论。
程序运行环境运行测试系统:Ubuntu16.04
运行环境:python3.6
方法一:使用numpy库读取.bin数据并使用mayavi.mlab来可视化点云数据1、安装通过下属命令安装依赖库
pip install numpy -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install mayavi -i https://pypi.tuna.tsinghua.edu.cn/simple
2、通过以下代码读取.bin文件并可视化
import numpy as np
import mayavi.mlab
# lidar_path换成自己的.bin文件路径
pointcloud = np.fromfile(str("lidar_path"), dtype=np.float32, count=-1).reshape([-1, 4])
x = pointcloud[:, 0] # x position of point
y = pointcloud[:, 1] # y position of point
z = pointcloud[:, 2] # z position of point
r = pointcloud[:, 3] # reflectance value of point
d = np.sqrt(x ** 2 + y ** 2) # Map Distance from sensor
degr = np.degrees(np.arctan(z / d))
vals = 'height'
if vals == "height":
col = z
else:
col = d
fig = mayavi.mlab.figure(bgcolor=(0, 0, 0), size=(640, 500))
mayavi.mlab.points3d(x, y, z,
col, # Values used for Color
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot'
# color=(0, 1, 0), # Used a fixed (r,g,b) instead
figure=fig,
)
mayavi.mlab.show()
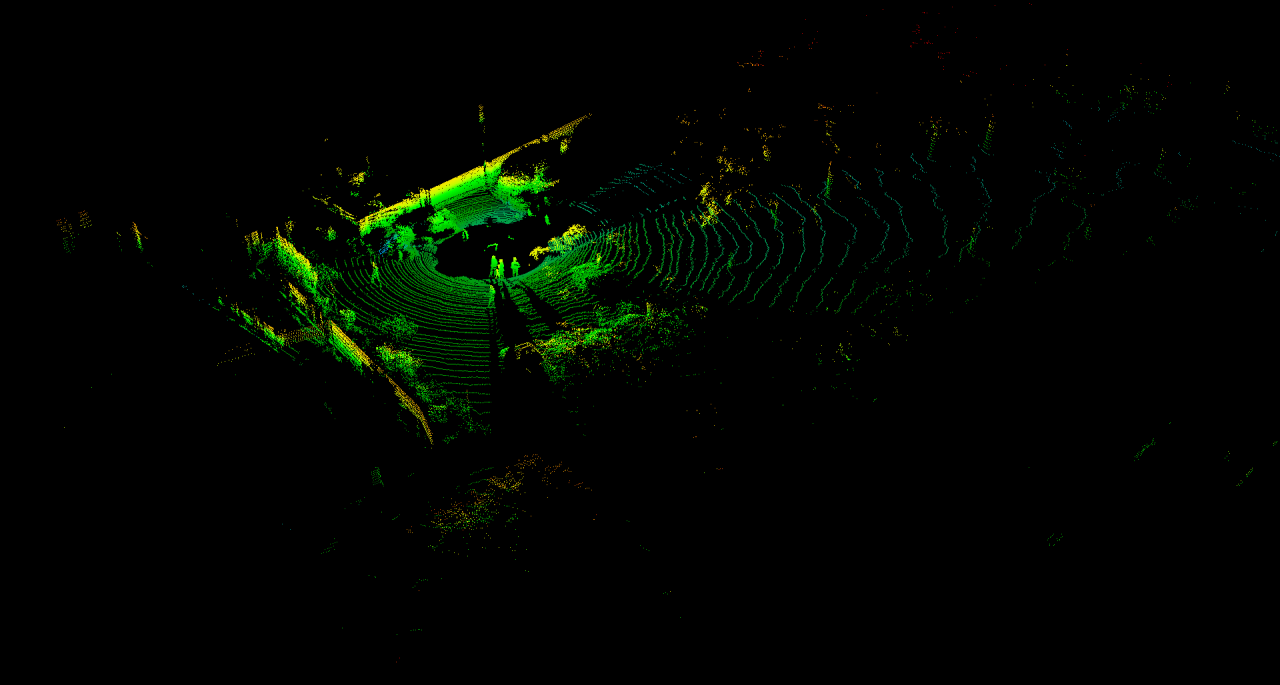
3、运行时候可视化结果如下:
方法二:使用numpy进行读取数据与使用python_pcl进行可视化
1、安装通过下属命令安装依赖
pip install python_pcl-XXX.whl #XXX为版本号,也可以不加
2、通过以下代码读取.bin文件并可视化
import numpy as np
import pcl.pcl_visualization
# lidar_path 指定一个kitti 数据的点云bin文件就行了
points = np.fromfile(lidar_path, dtype=np.float32).reshape(-1, 4) # .astype(np.float16)
# 这里对第四列进行赋值,它代表颜色值,根据你自己的需要赋值即可;
points[:, 3] = 3329330
# PointCloud_PointXYZRGB 需要点云数据是N*4,分别表示x,y,z,RGB ,其中RGB 用一个整数表示颜色;
color_cloud = pcl.PointCloud_PointXYZRGB(points)
visual = pcl.pcl_visualization.CloudViewing()
visual.ShowColorCloud(color_cloud, b'cloud')
flag = True
while flag:
flag != visual.WasStopped()
其中上述代码中的颜色值表如下所示:
白色:16777215 红色:16711680 绿色:65280 蓝色:255 牡丹红:16711935
青色:65535 黄色:16776960 黑色:0 海蓝:7396243 巧克力色:6042391
蓝紫色:10444703 黄铜色:11904578 亮金色:14276889 棕色:10911037
青铜色:9205843 深棕:6045747 深绿:3100463 深铜绿色:4879982
深橄榄绿:5197615 深兰花色:10040013 深紫色:8855416 深石板蓝:7021454
深铅灰色:3100495 深棕褐色:9922895 深绿松石色:7377883 暗木色:8740418
淡灰色:5526612 土灰玫瑰红色:8741731 长石色:13734517 火砖色:9315107
森林绿:2330147 金色:13467442 鲜黄色:14408560 灰色:12632256
铜绿色:5406582 青黄色:9689968 猎人绿:2186785 印度红:5123887
土黄色:10461023 浅蓝色:12638681 浅灰色:11053224 浅钢蓝色:9408445
浅木色:15319718 石灰绿色:3329330 桔黄色:14972979 褐红色:9315179
中海蓝色:3329433 中蓝色:3289805 中森林绿:7048739 中鲜黄色:15395502
中兰花色:9662683 中海绿色:4353858 中石板蓝色:8323327 中春绿色:8388352
中绿松石色:7396315 中紫红色:14381203 中木色:10911844 深藏青色:3092303
海军蓝:2302862 霓虹蓝:5066239 霓虹粉红:16740039 新深藏青色:156
新棕褐色:15452062 暗金黄色:13612347 橙色:16744192 橙红色:16720896
淡紫色:14381275 浅绿色:9419919 粉红色:12357519 李子色:15379946
石英色:14277107 艳蓝色:5855659 鲑鱼色:7291458 猩红色:12326679
海绿色:2330216 半甜巧克力色:7029286 赭色:9333539 银色:15132922
天蓝:3316172 石板蓝:32767 艳粉红色:16719022 春绿色:65407
钢蓝色:2321294 亮天蓝色:3715294 棕褐色:14390128 紫红色:14204888
石板蓝色:11397866 浓深棕色:6045747 淡浅灰色:13487565 紫罗兰色:5189455
紫罗兰红色:13382297 麦黄色:14211263 黄绿色:10079282
3、运行时候可视化结果如下(我赋值的时候为石灰绿色,结果出来的是黄色,原因未知,不过上手还是可以的):

方法三:使用numpy读取数据并使用rviz来进行数据可视化
1、首先需要在Ubuntu1604下安装ros环境
安装步骤可参考此篇博客https://blog.csdn.net/r1141207831/article/details/95337688
2、具体代码如下:
首先创建一个ros工程,参考下面的结构
test
└── src
└── rospy_rviz
├── CMakeLists.txt
├── data
│ ├── readbin.png
│ ├── readbin.py
│ ├── read_pcl.py
│ └── velodyne
│ ├── 000000.bin
│ ├── 000001.bin
│ ├── 000002.bin
│ ├── 000003.bin
│ ├── 000004.bin
├── launch
│ └── rospy_rviz.launch
├── package.xml
├── rviz
│ └── rospy_rviz.rviz
└── script
└── rospy_rviz.py
rospy_rviz.py
#!/usr/bin/env python
# coding=utf-8
import os
import numpy as np
import rospy
from visualization_msgs.msg import *
from sensor_msgs.msg import PointCloud2
from sensor_msgs import point_cloud2 as pc2
import pcl.pcl_visualization
def get_data():
file_name = list()
file_path = rospy.get_param('file_path', "") # 获取一个全局参数
for filename in os.listdir(file_path):
filename = os.path.join(file_path, filename)
if filename.split('.')[-1] == "bin":
# print(filename.split('/')[-1])
file_name.append(filename.split('/')[-1])
# print(file_name)
return file_name
def main():
rospy.init_node("point_cloud", anonymous=True)
rate = rospy.Rate(10)
pub_cloud = rospy.Publisher("/point_cloud", PointCloud2, queue_size=100)
point_cloud2 = PointCloud2()
point_cloud2.header.frame_id = "/velodyne"
file_path = rospy.get_param('file_path', "") # 获取一个全局参数
file_name = get_data()
for file in file_name:
point_data = np.fromfile((file_path + file), dtype=np.float32, count=-1).reshape([-1, 4])
# point_data = point_data[:10]
cloud = pc2.create_cloud_xyz32(point_cloud2.header, point_data[:, :3])
pub_cloud.publish(cloud)
# 控制发布频率
rate.sleep()
if __name__ == "__main__":
main()
CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(rospy_rviz)
find_package(catkin REQUIRED COMPONENTS
message_generation
std_msgs
)
# do not wildcard install files since the root folder of the package will contain a debian folder for releasing
catkin_install_python(PROGRAMS
script/rospy_rviz.py
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/rospy_rviz
)
install(FILES
launch/rospy_rviz.launch
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}/rospy_rviz
)
package.xml
rospy_rviz
0.0.0
rospy_rviz
Hqss
TODO
catkin
rospy_rviz.launch
3、使用下面命令运行程序
catkin_make
source devel/setup.bash
roslaunch rospy_rviz rospy_rviz.launch
4、可视化结果如下图所示
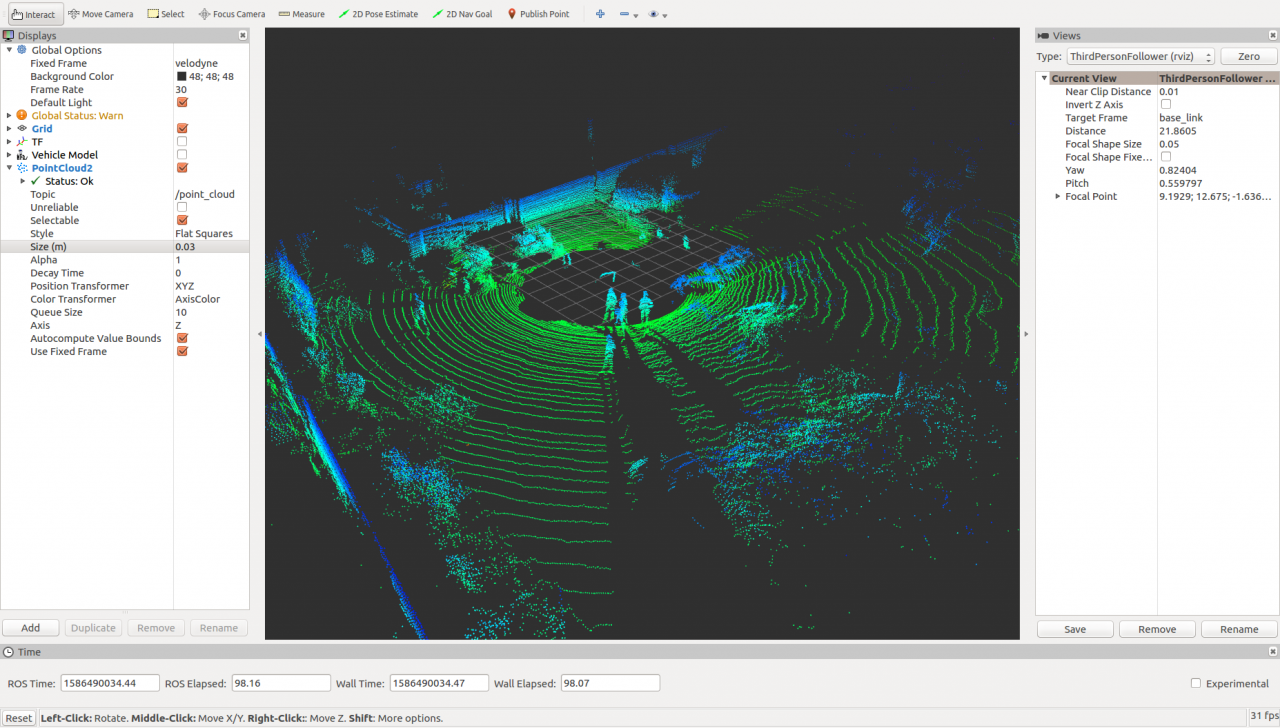
至此三种方法都可以正常可视化点云数据。
附录:
python 可视化点云工具 python-pcl https://zhuanlan.zhihu.com/p/72116675
作者:华青水上
相关文章
Veronica
2020-02-08
Serwa
2020-03-20
Rae
2023-07-22
Rhoda
2023-07-22
Hester
2023-07-22
Grace
2023-07-22
Vanna
2023-07-22
Peony
2023-07-22
Dorothy
2023-07-22
Dulcea
2023-07-22
Zandra
2023-07-22
Serafina
2023-07-24
Kathy
2023-08-08
Olivia
2023-08-08
Elina
2023-08-08
Jacinthe
2023-08-08
Viridis
2023-08-08
Hana
2023-08-08