卡尔曼滤波与状态估计例题python实现
卡尔曼滤波与状态估计例题python实现
预测状态量:
x^=(t∣t−1)=A~x(t−1)+Bu(t)\hat x=(t|t-1)=\widetilde{A}x(t-1)+Bu(t)x^=(t∣t−1)=Ax(t−1)+Bu(t)
预测误差协方差矩阵:
P(t∣t−1)=AP(t−1)AT+QP(t|t-1)=AP(t-1)A^T+QP(t∣t−1)=AP(t−1)AT+Q 测量更新(Correct):
最优估计状态量:
x~(t)=x^(t∣t−1)+K(t)[z(t)−Hx^(t∣t−1)]\widetilde{x}(t)=\hat x(t|t-1)+K(t)[z(t)-H\hat x(t|t-1)]x(t)=x^(t∣t−1)+K(t)[z(t)−Hx^(t∣t−1)]
计算误差增益:
K(t)=P(t∣t−1)HT[R+HP(t∣t−1)HT]K(t)=\frac{P(t|t-1)H^T}{[R+HP(t|t-1)H^T]}K(t)=[R+HP(t∣t−1)HT]P(t∣t−1)HT
误差协方差矩阵:
P(t)=[I−K(t)H]P(t∣t−1)P(t)=[I-K(t)H]P(t|t-1)P(t)=[I−K(t)H]P(t∣t−1) 状态方程和观测方程
作者:小小秃头怪
关于卡尔曼滤波的原理这里就不赘述了,很多大佬说的很棒,这里就把网课上看到的例题在这里做一下
巩固一下
预测状态量:
x^=(t∣t−1)=A~x(t−1)+Bu(t)\hat x=(t|t-1)=\widetilde{A}x(t-1)+Bu(t)x^=(t∣t−1)=Ax(t−1)+Bu(t)
预测误差协方差矩阵:
P(t∣t−1)=AP(t−1)AT+QP(t|t-1)=AP(t-1)A^T+QP(t∣t−1)=AP(t−1)AT+Q 测量更新(Correct):
最优估计状态量:
x~(t)=x^(t∣t−1)+K(t)[z(t)−Hx^(t∣t−1)]\widetilde{x}(t)=\hat x(t|t-1)+K(t)[z(t)-H\hat x(t|t-1)]x(t)=x^(t∣t−1)+K(t)[z(t)−Hx^(t∣t−1)]
计算误差增益:
K(t)=P(t∣t−1)HT[R+HP(t∣t−1)HT]K(t)=\frac{P(t|t-1)H^T}{[R+HP(t|t-1)H^T]}K(t)=[R+HP(t∣t−1)HT]P(t∣t−1)HT
误差协方差矩阵:
P(t)=[I−K(t)H]P(t∣t−1)P(t)=[I-K(t)H]P(t|t-1)P(t)=[I−K(t)H]P(t∣t−1) 状态方程和观测方程
状态方程:
x(t)=Ax(t−1)+Bu(t)+w(t)x(t)=Ax(t-1)+Bu(t)+w(t)x(t)=Ax(t−1)+Bu(t)+w(t)
观测方程:
z(t)=Hx(t)+v(t)z(t)=Hx(t)+v(t)z(t)=Hx(t)+v(t)
假设一辆小车在做匀加速运动,初速度为0,加速度为5(m/s2)5(m/s^2)5(m/s2), 小车上装有速度传感器,采样频率为10Hz10Hz10Hz ,传感器测量误差为高斯白噪声。尝试对小车的运动速度进行估计。
设k时刻时的速度为xkx_kxk,则系统的状态方程为:
xk=xk−1+5×110+wk−1x_k=x_{k-1}+5\times \frac{1}{10}+w_{k-1}xk=xk−1+5×101+wk−1
测量方程为:
zk=xk+vkz_k=x_k+v_kzk=xk+vk
www 和 vvv 分别是系统和测量误差
初始参数设定,根据状态方程和观测方程,不难得出初始参数:
#初始参数设定
A=np.array([1])
B=np.array([1])
U=0.5
H=np.array([1])
由于传感器每一步的采样频率的 0.1 秒,这里设步数是500步
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.family'] = ['sans-serif']
plt.rcParams['font.sans-serif'] = ['SimHei']
#预测更新的方程
def predict_update(A,B,U,P0,Q,X0):
Xp=A*X0+B*U
Pp=A*P0*A.T+Q
return Xp,Pp
#测量更新的方程
def correct_update(H,R,Pp,Z,Xp):
#print(Xp)
Xp=np.array([Xp])
I=np.eye(Xp.shape[0])
K=(Pp*H.T)/(H*Pp*H.T+R)
Xup=Xp+K*(Z-H*Xp)
Pup=(I-K*H)*Pp
return Xup,Pup
def main():
#初始参数设定
A=np.array([1])
B=np.array([1])
U=0.5
H=np.array([1])
step=500
#设置观测值
v=np.random.normal(0,10,step) #设置一个均值为0,方差为10的1x500的高斯噪声
true_x=0.5*np.arange(0,step) #假设没有噪声时的速度
temp=true_x+v #真实的速度就是加上噪声
X_0=np.zeros(step) #先验概率初始值
#print(X_0.shape)
#print(X_0)
X0=np.zeros((step)) #后验概率初始值
Z=np.zeros((step)) #观测值初始值
Z=temp #加上噪声的车辆测量速度,用于模拟观测值
P0=np.array([1]) #后验估计的协方差初值
Q=np.array([10]) #状态方程噪声协方差矩阵
R=np.array([10]) #测量方程协方差矩阵
for i in range(2,step):
X_0[i],P_0=predict_update(A,B,U,P0,Q,X0[i-1])
X0[i],P0=correct_update(H,R,P_0,Z[i],X_0[i])
#print(P0.shape)
plt.figure(figsize=(16,10))
plt.plot(np.arange(500),Z,'y',label="观测值") #黄色代表观测值
plt.plot(np.arange(500),true_x,'r',label="真实值")#红色代表真实值
plt.plot(np.arange(500),X0,'b',label="卡尔曼滤波")#蓝色代表卡尔曼滤波
plt.legend(loc='best')
plt.show()
if __name__=='__main__':
main()
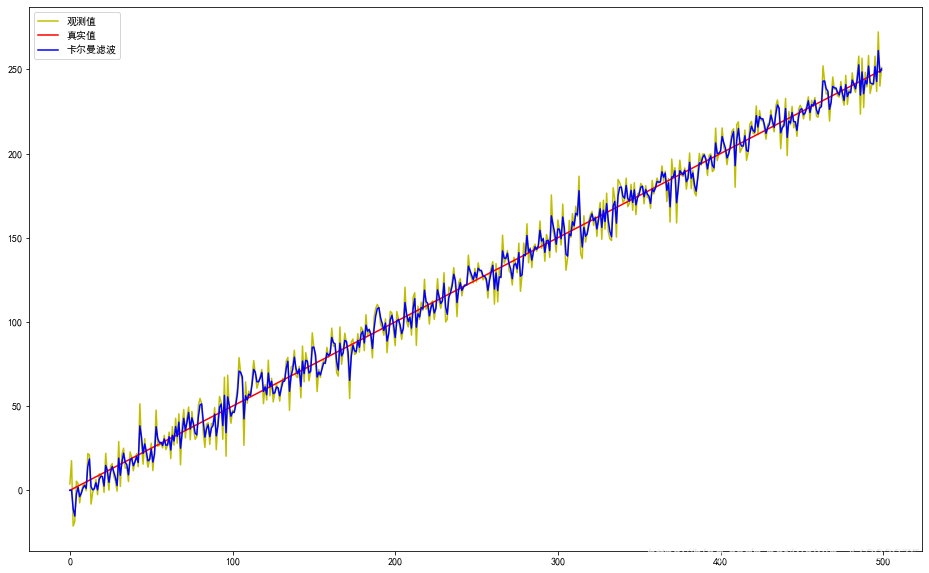
上图可以看出,观测值比真实值偏差较大,而滤波值实现了很好的估计。
由于人为设置使状态方程描述不准确,这说明系统噪声方差较大,(由于系统模型不可靠造成的预测结果不准确),增大Q值
如果由于观测工具能力较差,则应该增大R的值。
也可以增大P0,总之就是对系统分析后,一步步推导。
参考:北京理工大学《无人驾驶车辆》
作者:小小秃头怪