计算机视觉算法与应用 -第二章笔记
*第二章图像形成*
几何基元:用来构成描述三维形状的基本构件。常用2D,3D基元:点、线、面。
几何基元2D/3D变换:○1平移、○2刚性(平移+旋转)、○3相似、○4仿射(保持
平直性和平行性)、○5透视(将图片投影到一个新的视平面,也称作投影映射.它
是二维到三维(如果是3D就是三维到四维再到新三维),再到另一个二维空间的
映射)。
3D旋转表达形式:○1欧拉角(更精确),○2轴/角(最简洁),○3单位四元数(可表达连续性旋转,应用于光滑移动的摄影机)
3D到2D投影:正交投影(最简单):舍弃三维坐标的z分量得到2D点x,透视投影(最常用):通过除以Z分量来实现点映射到图像平面。
光度测定学:2D特征构成三维图像的描述,但图像不是由2D特征组成。图像由离散的色彩和亮度值组成。
光度图像形成:光线从一个或多个光源发出,然后从物体表面反射/散射,该光纤的一部分朝向摄像机。
反射:漫反射:所有方向上均匀分散;镜面反射;
光学目前在研究:焦距(镜头的参数)、曝光、色像差(因玻璃的折射率在不同颜色的光聚集在不同的距离上)、虚影(图像亮度在图像边缘处会降低):○1自然虚影(光圈的透视收缩效应),○2机械虚影(复合镜头中邻近镜头内部遮挡)
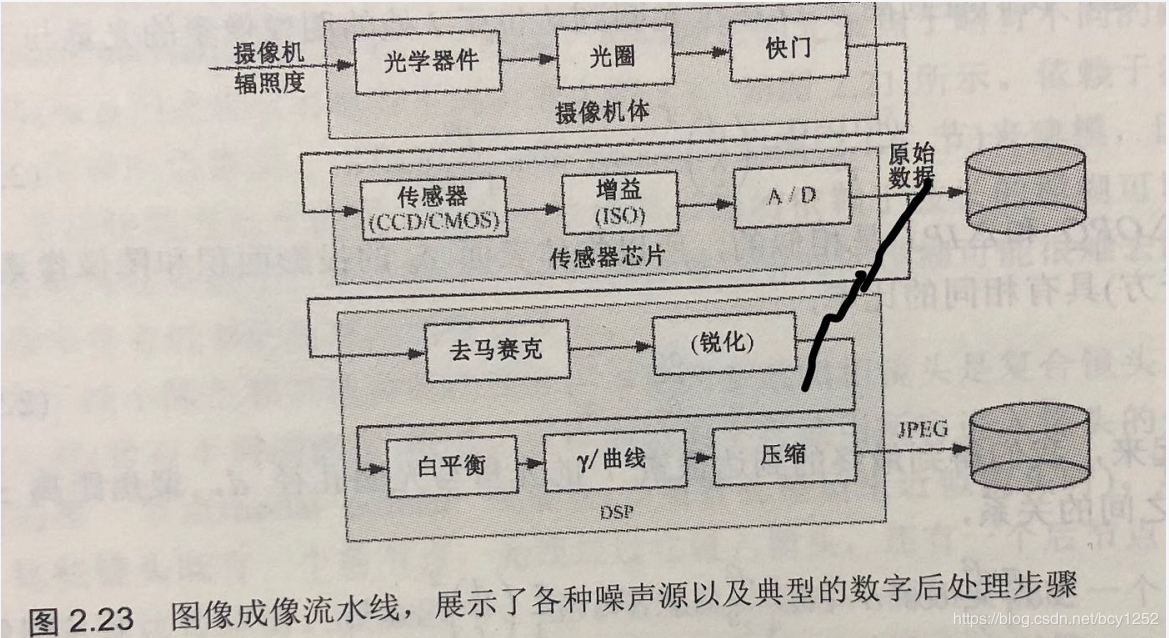
数字摄像机:光最初从一个或多个光源出发,经单个或多个表面反射/散射后,再通过摄像机光学器件(镜头)到达成像传感器,并转换成RGB数值形成最终图像。
影响数字传感器的主要因素:○1快门速度(控制到达传感器的光亮),○2采样间距(传感器的物理间隔),○3填充率(活性传感去理论可获得的传感区域),○4芯片尺寸(更大的尺寸可以使每个传感器单元具有更好的光敏性)○5模拟增益,○6传感器噪声(计算机视觉算法),○7模数转换分辨率,○8数字后处理。
采样与混叠:当一个光场撞击传感器落在成像芯片的活性传感区域上,光场中的光子被每个活性感光元件上的光子收集累积,在被数字化,芯片填充率(每秒渲染像素数量)低会造成混叠现象。
色彩:光谱不同部分的光以某种形式整合为我们再数字图像中看到的离散的红、绿、蓝(RGB)色数值,三原色进行彩色匹配得到更多的颜色,CIE色度图,彩色数值一种表达形式。
压缩:离散余弦变换(DCT),小波变换等。
作者:bcy1252