教你如何从零做一个智能象棋机器人——基于机器视觉与dobot的象棋机器人
csdn具有开源精神的人很多,正是因为你们无私的奉献精神,激励着我也打算做个开源项目,这是我的第一个开源项目,要认真写。
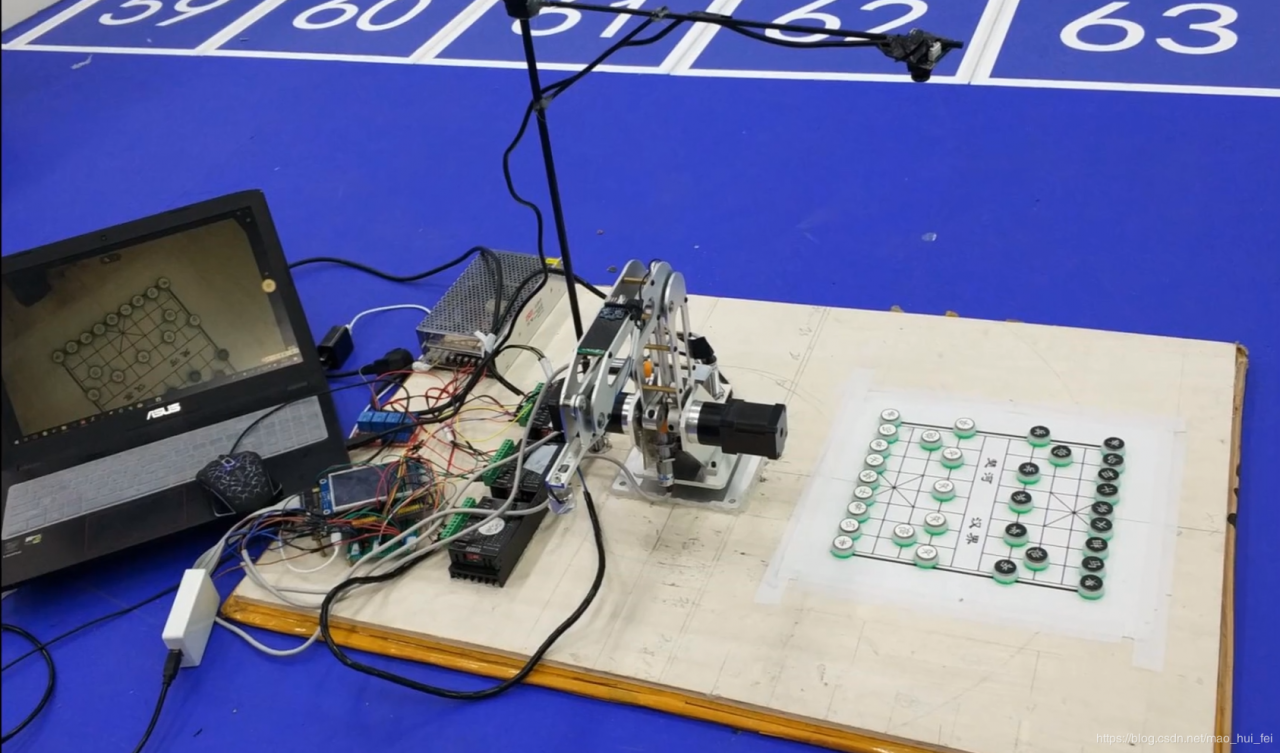
不多说,先上图片 整体效果图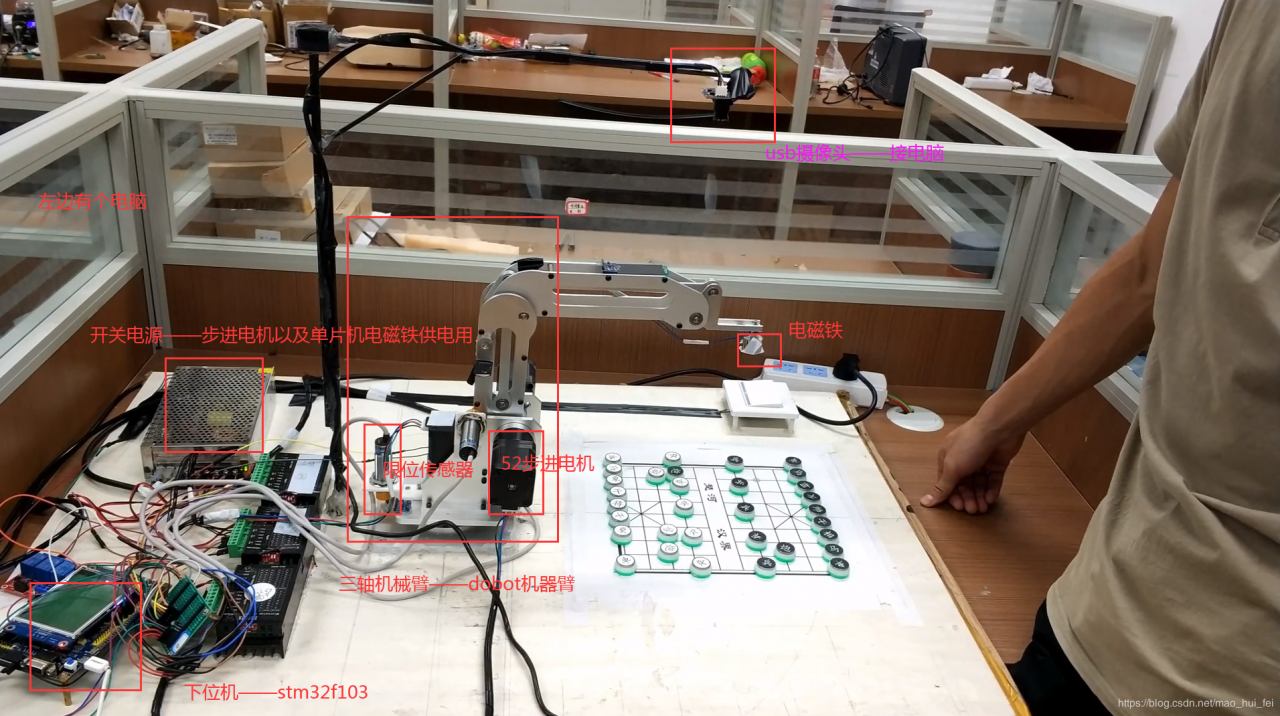
视频地址:智能象棋机器人:https://www.bilibili.com/video/av24602515
构成| 物品 | 价格 | 备注 |
|---|---|---|
| 一台笔记本 | 。。。 | 用于图像识别与博弈算法,以及上位机界面 |
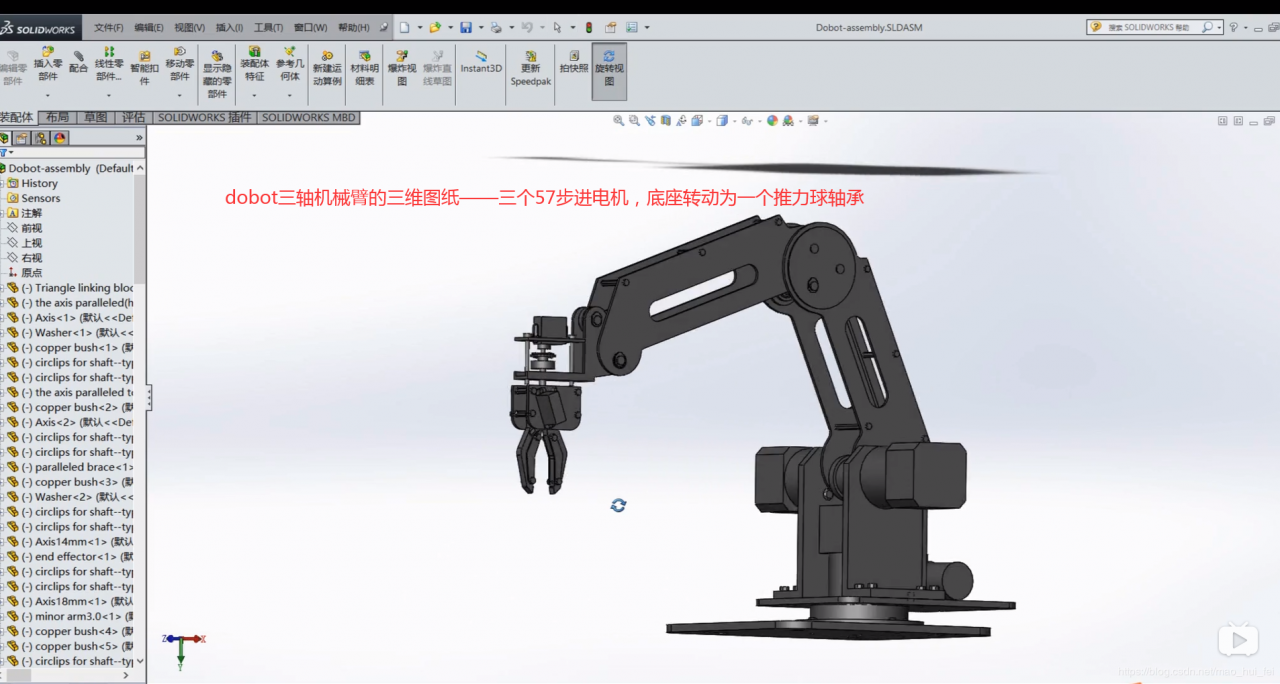
| 一个dobot机械臂 | 1600 | 用于完成棋子抓取,步进电机是减速步进电机,速度减慢了,但是扭矩增大了 |
| 三台步进电机驱动器 | 50*3 | 用于驱动机械臂的步进电机 |
| stm32f103单片机 | 70 | 用于控制机械臂与电磁铁 |
| 一个电磁铁 | 10 | 用于吸取与放下棋子 |
| usb摄像头 | 200 | 用于识别棋子的种类与位置 |
| 一副象棋 | 30 | 改装了,上面贴了铁质硬币,硬币上粘了纸 |
| 限位开关 | 10*3 | 用于机械臂回原点 |
说明:整个系统花费最高的应该就是这个机械臂,不过想要做机器人,机械部分是最花钱,但是这款机械臂是我目前找到的能实现的最高性价比的了,虽然图纸是有的,但是想要自己加工一套,那显然是更不经济了。曾经想过用scara机械臂来实现的,那款机械臂控制十分简单,但是造价太高,最便宜的也要5000,曾经在某科技竞赛上,也看过一款机械臂,那款机械臂是由大扭矩舵机组成的,不光扭矩大,精度也高,速度也很快,但是行程太短,下下五子棋可以,但是象棋就不行了,最要命的是它一个舵机就要8000元,而且整个软件控制系统都是完善的,不用你自己去实现,那就失去了控制机械臂的乐趣。还是要感谢发明出这款机械臂的团队。这款机械臂的设计图纸我这里也是有的,通过看图纸,你可以将大学机械原理,机械设计用到的东西,实践一遍,也是十分有意思。
软件设计整个系统的软件系统由三部分构成分别是机械臂控制、图像识别、博弈算法
机械臂控制由stm32f103控制步进电机来进行运动,首先对机械臂进行分析,然后编程
图像识别主要是棋盘交叉点的识别、移动棋子的前后位置、象棋的识别
交叉点识别比较简单
棋子前后移动的位置将两幅图相减就行
象棋识别是用svm+lbp进行识别,象棋上面汉字识别的难点就是汉字不是正立的,是各种方向的,而lbp特征具有旋转不变性,因此可以用来识别象棋。
这个主要是参考一本书叫《xxx》,里面有开源代码,当把搜索步长加到四步时,一般人已经下不过了,然后把图像识别的输入输出接口接到这里面即可。
持续更新,完善中。。。。。。
有对这个感兴趣的吗,期待大家的鼓励,让我继续更新。
作者:翟羽嚄