树莓派4B安装ubuntu18.04.4和ROS并测试激光雷达
需要的硬件:
树莓派4B、8G以上的SD卡、树莓派的HDMI线、电源、网线、USB的鼠标和键盘
需要的软件工具:
SD Card Formatter 、 Win32DiskImager、WNetWatcher、PuTTY、WinSCP
树莓派ubuntu 18.04.4 64位镜像系统 链接:
ubuntu官方链接
1.用SD Card Formatter格式化一下SD卡

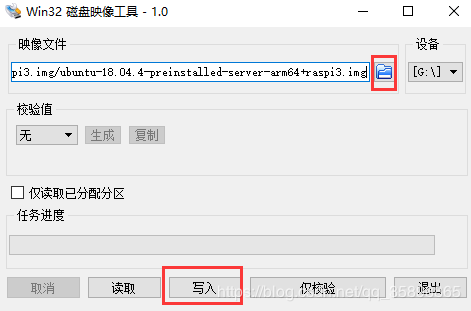
2.用Win32DiskImager给SD烧录ubuntu 18.04.4 64位镜像
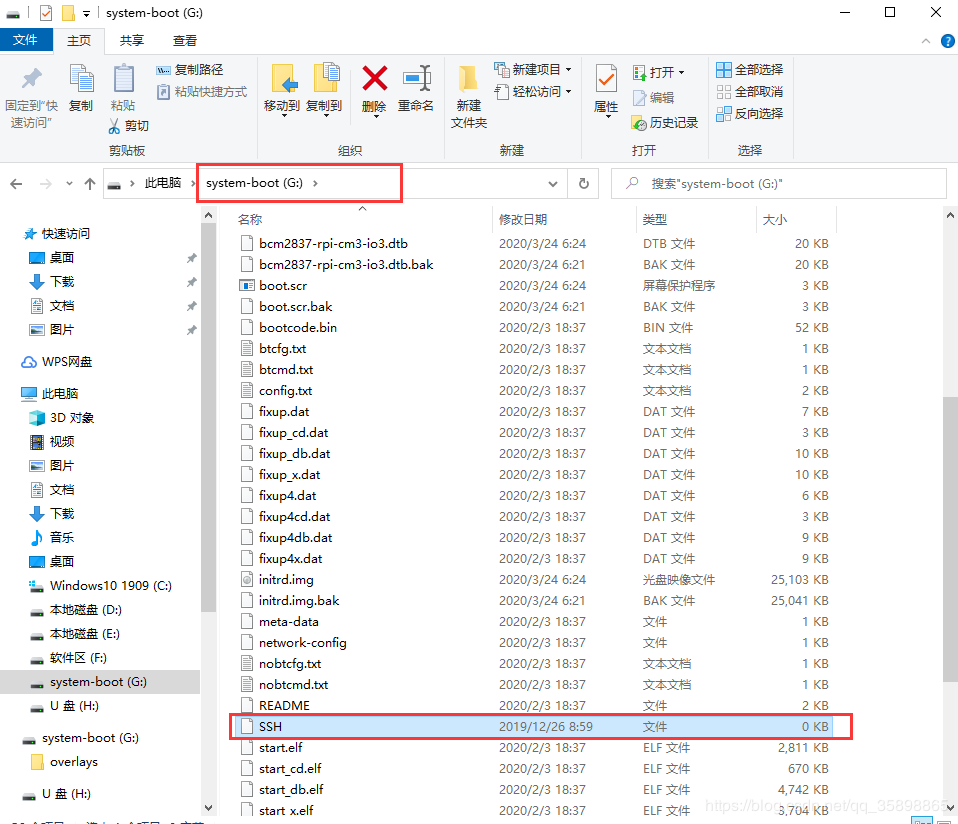
3.烧录好后打开SD里的boot文件夹,添加一个名称为SSH的空白文件(可以在window上用记事本新建文件SSH把 .txt 删掉就好。)
4.将SD卡插到树莓派4B上
5.给树莓派接好电源和网线,等待1分钟,打开WNetWatcher软件 查找树莓派的ip地址(如果不知道树莓派的mac地址,不知道查询出来的ip哪个是树莓派的ip地址,那就先把树莓派的网线拔掉,打开WNetWatcher查询,界面右边会有检测次数,再接上树莓派网线,再WNetWatcher查询一次,那么树莓派地址被检测到的次数是比其它的少一次的,然后把树莓派的ip地址和mac地址记录下来)
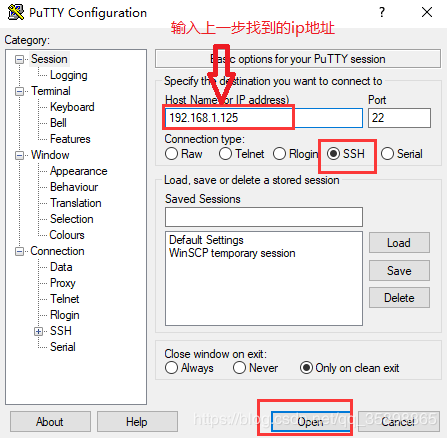
6.使用PuTTY登录,开始的默认名称和密码都是 ubuntu ,需要修改密码(看好英文提示,是先登录,再输入当前密码ubuntu,然后才是更改为自己设定的密码)
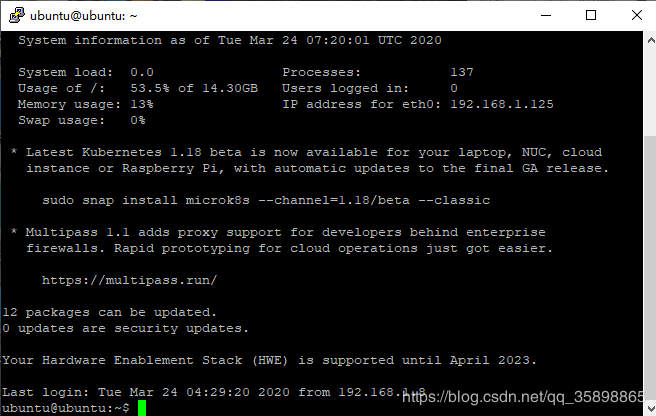
登陆成功之后的界面图
7.更改ubuntu18.04的软件源
7.可以继续使用PuTTY来操作下面的命令,不过我推荐使用WinSCP,这个能看到ubuntu的系统文件。
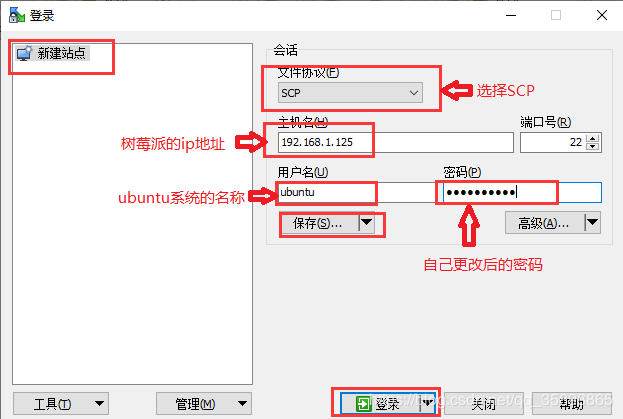
使用WinSCP登陆ubuntu
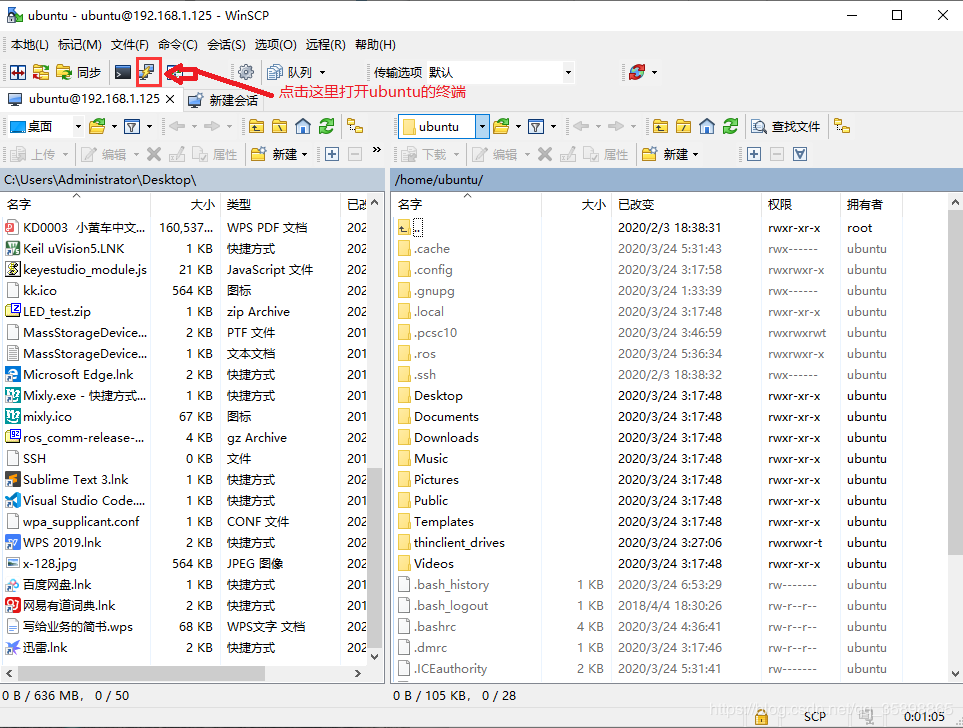
登陆成功后进入终端,如下图
我使用了中科大的,更换步骤:
备份:
sudo cp -r /etc/apt/sources.list /etc/apt/sources.list.bf
替换源:
sudo sed -i -e 's/https\?:\/\/[^/]*\/ubuntu/http:\/\/mirrors.ustc.edu.cn\/ubuntu/g' /etc/apt/sources.list
更新软件源:
sudo apt update
8.安装ubuntu18.04.4的桌面
使用WinSCP登录,主机名就是查询到的ip地址,登录进去后,打开终端,输入安装桌面的命令:(可以复制粘贴)
sudo apt-get install xubuntu-desktop
等待一个小时左右
9.安装ROS
就跟在虚拟机的ubuntu 18.04上安装一样
(1)中科大的ROS源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
(2)设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(3)更新一下
sudo apt-get update
(4)安装ROS的桌面完整版
sudo apt-get install ros-melodic-desktop-full
(5)解决依赖
sudo rosdep init
rosdep update
如果sudo rosdep init 显示错误 rosdep不是内部命令,则安装:
sudo apt install rospack-tools
rosdep update出错,那就再执行一次rosdep update
(6)添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
(7)安装ros的一些便利工具
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
(8)运行小乌龟事例
将HDMI线接到显示屏,登陆进入ubuntu的界面
打开第一个终端,输入:roscore
打开第二个终端,输入:rosrun turtlesim turtlesim_node
打开第三个终端,输入:rosrun turtlesim turtle_teleop_key
选择第三个终端,然后按键盘上的方向键就可以控制小乌龟运动了。
10.测试激光雷达(使用的激光雷达是YDLIDAR 型号:X2L)
(1)创建目录文件
mkdir -p ~/catkin_ws/src
(2)cd进入到src文件夹
cd ~/catkin_ws/src
(3)创建一个工作空间
catkin_init_workspace
(4)回到catkin_ws目录下并且编译一下
cd ~/catkin_ws && catkin_make
(5)添加 catkin环境变量到~/.bashrc文件中,并使其生效。
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
(6)6.再进入到src目录,克隆对应雷达型号 ydlidar工程到你的 ROS工作空间下的 src目录中。
方法(1)打开WinSCP找到创建的catkin_ws目录,需要右键刷新一下,
如下图
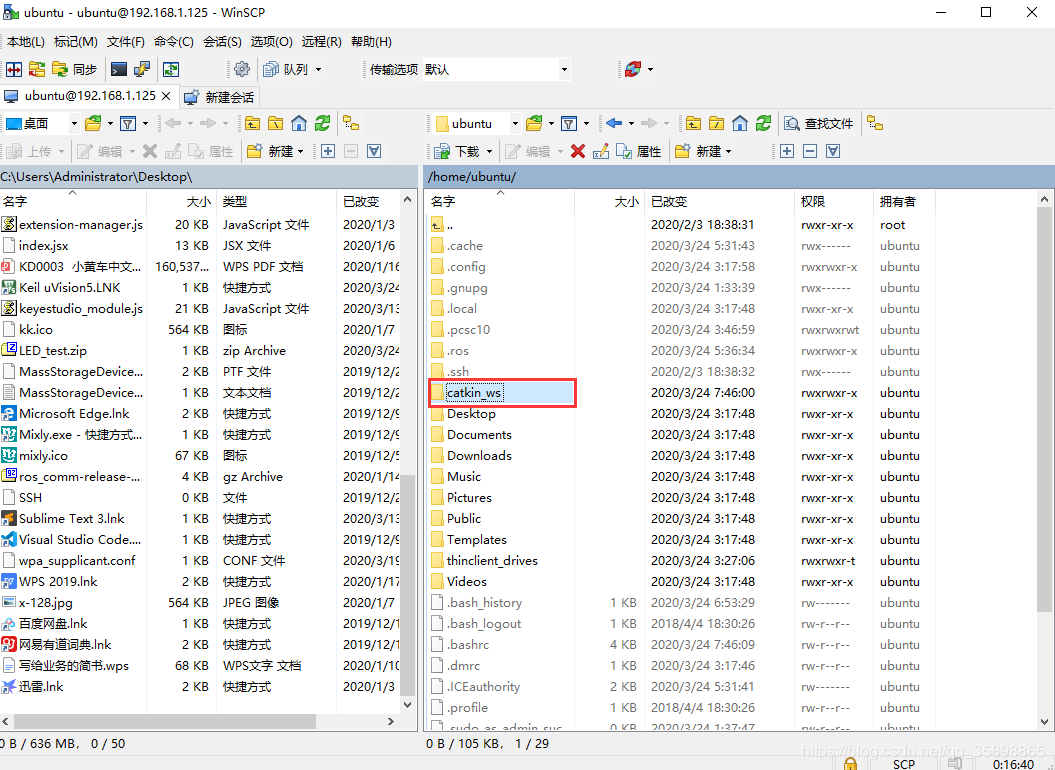
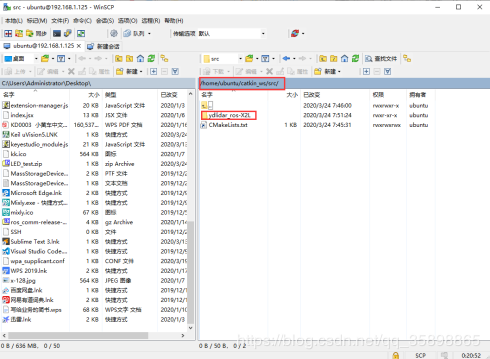
将下载好的对应型号X2L的工程包直接拖进去就好,如下图
方法(2)cd进入到src文件夹,再通过git克隆github上的文件。
cd ~/catkin_ws/src
git clone https://github.com/YDLIDAR/ydlidar_ros
cd ydlidar_ros
git checkout X2L
cd ../..
(7)编译生成 ydlidar_node 和 ydlidar_client。
catkin_make
(8)接好激光雷达到树莓派
(9)创建 YDLIDAR 雷达串口别名[/dev/ydlidar]。
roscd ydlidar/startup
sudo chmod 0777 *
sudo sh initenv.sh
(10)运行 ydlidar_node和 ydlidar_client
打开一个终端运行:
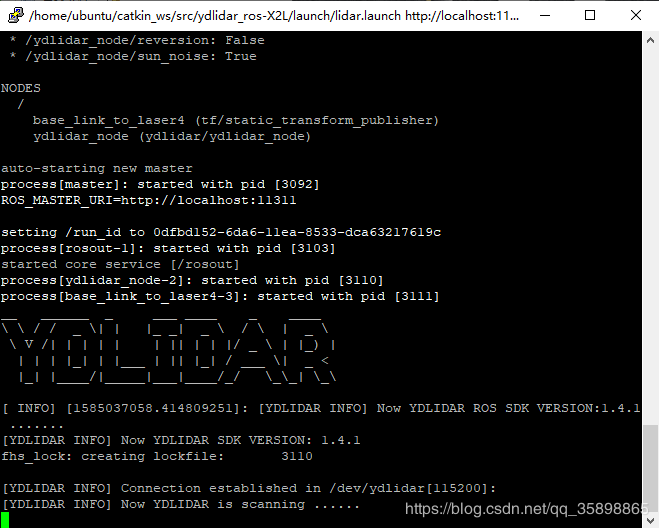
roslaunch ydlidar lidar.launch
注意:运行上面命令出错时,很可能的错误是没有找到激光雷达的串口,那就再执行一次第9步的命令,再执行下面的命令。如果还是不行,那就关闭终端,重新打开,再从第9步执行。
成功了会有下图显示
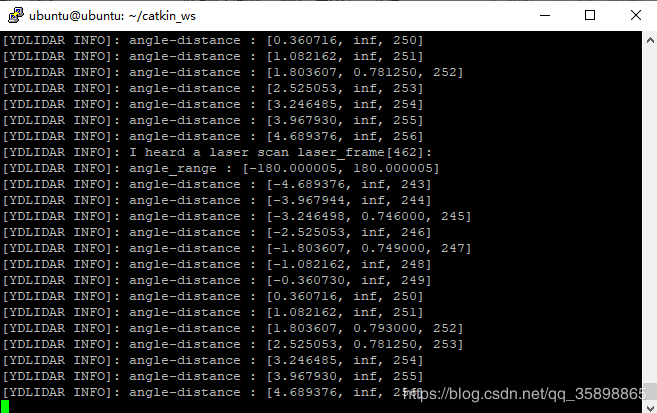
打开第二个终端,运行:
cd ~/catkin_ws
rosrun ydlidar ydlidar_client
就可以看到数据输出了,如下图
(11)显示激光雷达扫描到的浮点图
这里是需要显示屏的,进入ubuntu显示桌面,打开终端
进入到catkin_ws文件夹
cd ~/catkin_ws
输入命令:
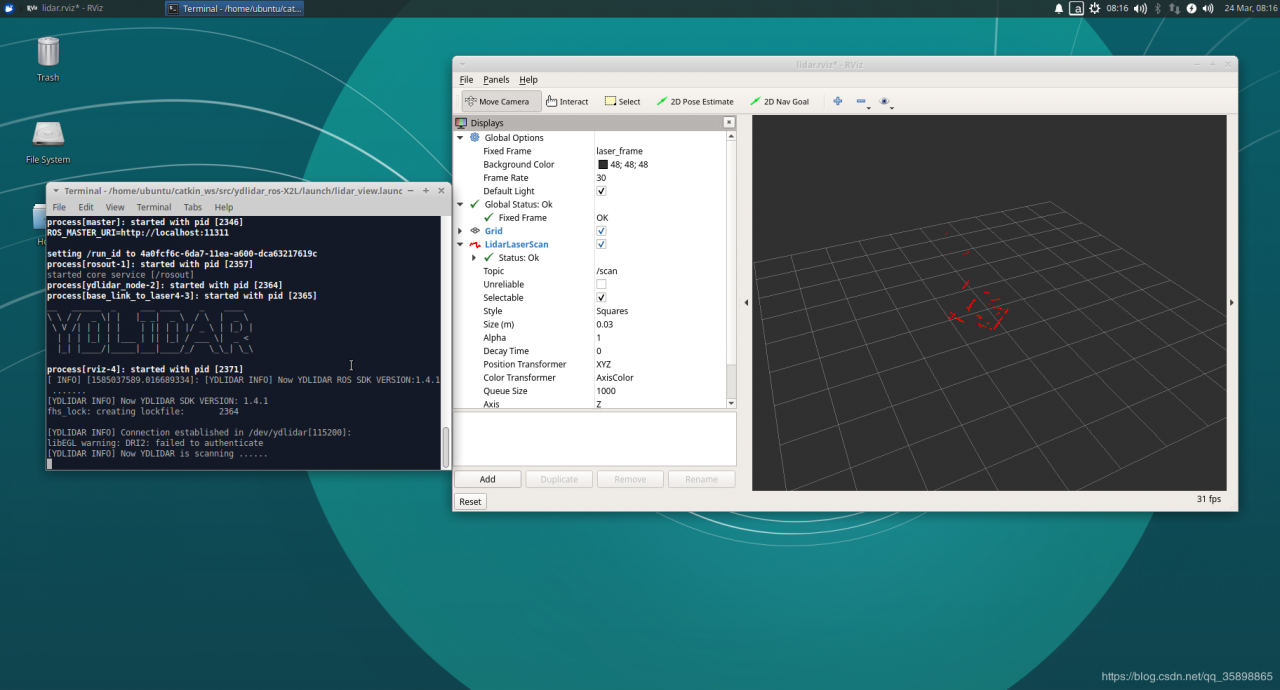
roslaunch ydlidar lidar_view.launch
回车。等下就会出现激光雷达扫描到的浮点图了。如下图
作者:¥万有引力¥