linux驱动之I2C总线驱动框架分析
Table of Contents
1、I2C模型框图
2、设备信息层
2.1、非设备树形式
2.2、设备树形式
3、芯片控制器层adapter
3.1、控制器初始化
3.2、控制器底层传输函数(起始,数据,应答,停止)
4、核心层core.c i2c_bus
4.1、i2c_bus总线初始化
4.2、client(设备)和i2c_driver(设备驱动)匹配过程
4.2.1、创建client(设备)时匹配i2c_driver(驱动)过程
4.2.2、注册i2c_driver(驱动)时匹配client(设备)过程
4.3、总线探测probe
5、设备驱动层
5.1、设备驱动注册
5.2、设备驱动探测probe,并初始化i2c器件
5.3、数据传输
1、I2C模型框图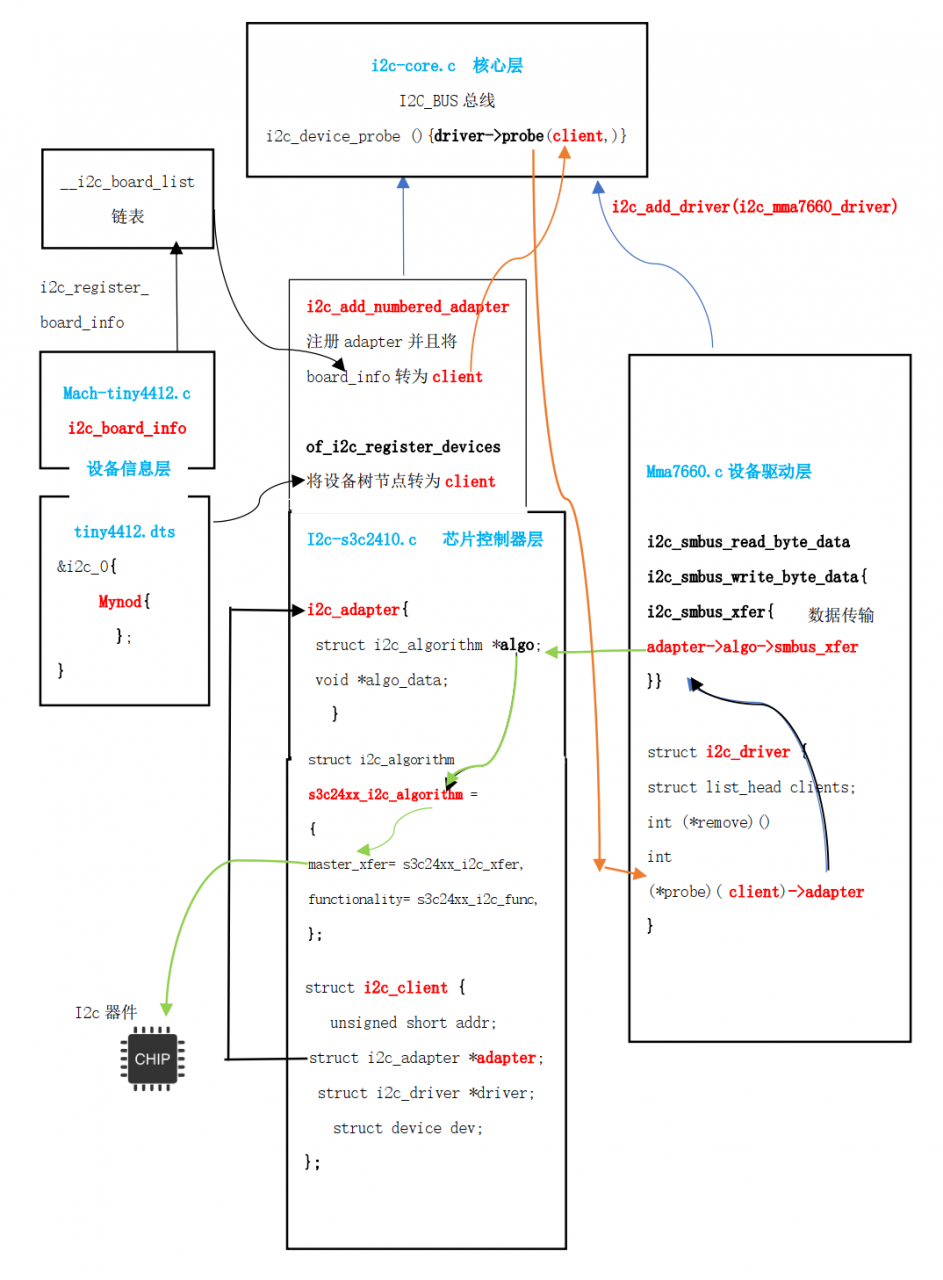
static struct mma7660_platform_data mma7660_pdata = {
.irq = IRQ_EINT(25),
.poll_interval = 100,
.input_fuzz = 4,
.input_flat = 4,
};
static struct i2c_board_info smdk4x12_i2c_devs3[] __initdata = {
{
I2C_BOARD_INFO("mma7660", 0x4c),
.platform_data = &mma7660_pdata,
},
};
i2c_register_board_info(3, smdk4x12_i2c_devs3,ARRAY_SIZE(smdk4x12_i2c_devs3));
list_add_tail(&devinfo->list, &__i2c_board_list);
2.2、设备树形式
’参考文章:I2C、SPI设备树驱动对设备子节点的处理
&i2c_3 {
#address-cells = ;
#size-cells = ;
compatible = "samsung,s3c2440-i2c";
reg = ;
interrupts = ;
clocks = ;
clock-names = "i2c";
samsung,i2c-sda-delay = ;
samsung,i2c-slave-addr = ;
samsung,i2c-max-bus-freq = ;
pinctrl-0 = ;
pinctrl-names = "default";
status = "okay";
codec: mma7660@1a {
compatible = "mma7660";
reg = ;
clocks = ;
clock-names = "MCLK1";
};
};
3、芯片控制器层adapter
3.1、控制器初始化
参考文章:I2C、SPI设备树驱动对设备子节点的处理
处理器有n个i2c控制器,那么就需要注册n个adapter
一个i2c控制器(接口)下可能接有多个i2c器件,因此一个adapter可能对应多个client
static struct platform_driver s3c24xx_i2c_driver = {
.probe = s3c24xx_i2c_probe,
.remove = s3c24xx_i2c_remove,
.id_table = s3c24xx_driver_ids,
.driver = {
.owner = THIS_MODULE,
.name = "s3c-i2c",
.pm = S3C24XX_DEV_PM_OPS,
.of_match_table = of_match_ptr(s3c24xx_i2c_match),
},
};
static int __init i2c_adap_s3c_init(void)
{
return platform_driver_register(&s3c24xx_i2c_driver);
}
static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
ret = s3c24xx_i2c_init(i2c); //初始化i2c硬件控制器
ret = i2c_add_numbered_adapter(&i2c->adap); //注册adapter,并转化设备信息为client
of_i2c_register_devices(&i2c->adap); //转化设备树节点为client
return ret;
}
3.2、控制器底层传输函数(起始,数据,应答,停止)
static const struct i2c_algorithm s3c24xx_i2c_algorithm = {
.master_xfer = s3c24xx_i2c_xfer,
.functionality = s3c24xx_i2c_func,
};
static int s3c24xx_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num)
{
struct s3c24xx_i2c *i2c = (struct s3c24xx_i2c *)adap->algo_data;
ret = s3c24xx_i2c_doxfer(i2c, msgs, num);
return -EREMOTEIO;
}
static int s3c24xx_i2c_doxfer(struct s3c24xx_i2c *i2c,
struct i2c_msg *msgs, int num)
{
unsigned long timeout;
int ret;
if (i2c->suspended)
return -EIO;
ret = s3c24xx_i2c_set_master(i2c);
if (ret != 0) {
dev_err(i2c->dev, "cannot get bus (error %d)\n", ret);
ret = -EAGAIN;
goto out;
}
i2c->msg = msgs;
i2c->msg_num = num;
i2c->msg_ptr = 0;
i2c->msg_idx = 0;
i2c->state = STATE_START;
s3c24xx_i2c_enable_irq(i2c);
s3c24xx_i2c_message_start(i2c, msgs); //开始传输
}
4、核心层core.c i2c_bus
4.1、i2c_bus总线初始化
struct bus_type i2c_bus_type = {
.name = "i2c",
.match = i2c_device_match,
.probe = i2c_device_probe,
.remove = i2c_device_remove,
.shutdown = i2c_device_shutdown,
.pm = &i2c_device_pm_ops,
};
static int __init i2c_init(void)
{
retval = bus_register(&i2c_bus_type);
}
4.2、client(设备)和i2c_driver(设备驱动)匹配过程
4.2.1、创建client(设备)时匹配i2c_driver(驱动)过程
i2c_new_device
device_register
device_add
bus_probe_device
device_attach
bus_for_each_drv
__device_attach
driver_match_device //匹配
drv->bus->match
driver_probe_device //探测
really_probe
dev->bus->probe
4.2.2、注册i2c_driver(驱动)时匹配client(设备)过程
i2c_add_driver
i2c_register_driver
driver_register
bus_add_driver
driver_attach
bus_for_each_dev
__driver_attach
driver_match_device //匹配
drv->bus->match
driver_probe_device //探测
really_probe
dev->bus->probe
4.3、总线探测probe
static int i2c_device_probe(struct device *dev)
{
driver = to_i2c_driver(dev->driver); //获得设备驱动
client->driver = driver;
//调用设备驱动probe函数
status = driver->probe(client, i2c_match_id(driver->id_table, client));
return status;
}
5、设备驱动层
5.1、设备驱动注册
static struct i2c_driver i2c_mma7660_driver = {
.driver = {
.name = MMA7660_NAME,
},
.probe = mma7660_probe,
.remove = __devexit_p(mma7660_remove),
.suspend = mma7660_suspend,
.resume = mma7660_resume,
.id_table = mma7660_ids,
};
static int __init init_mma7660(void)
{
int ret;
ret = i2c_add_driver(&i2c_mma7660_driver); //注册驱动
printk(KERN_INFO "MMA7660 sensor driver registered.\n");
return ret;
}
5.2、设备驱动探测probe,并初始化i2c器件
static int __devinit mma7660_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct i2c_adapter *adapter = to_i2c_adapter(client->dev.parent); //得到i2c控制器信息
mma7660_initialize(client); //i2c器件初始化
ret = input_register_polled_device(mma7660_idev);//把i2c设备当输入设备访问
return 0;
}
5.3、数据传输
整体调用过程
mma7660_read_xyz
i2c_smbus_read_byte_data
i2c_smbus_xfer
adapter->algo->smbus_xfer
详细调用过程
static void mma7660_dev_poll(struct input_polled_dev *dev)
{
mma7660_report_abs();
}
static void mma7660_report_abs(void)
{
int axis[3];
int i;
for (i = 0; i input, ABS_X, axis[0]);
input_report_abs(mma7660_idev->input, ABS_Y, axis[1]);
input_report_abs(mma7660_idev->input, ABS_Z, axis[2]);
input_sync(mma7660_idev->input);
//printk("3-Axis ... %3d, %3d, %3d\n", axis[0], axis[1], axis[2]);
}
static int mma7660_read_xyz(struct i2c_client *client, int idx, int *xyz)
{
val = i2c_smbus_read_byte_data(client, idx + MMA7660_XOUT);
return 0;
}
s32 i2c_smbus_read_byte_data(const struct i2c_client *client, u8 command)
{
union i2c_smbus_data data;
int status;
status = i2c_smbus_xfer(client->adapter, client->addr, client->flags,
I2C_SMBUS_READ, command,
I2C_SMBUS_BYTE_DATA, &data);
return (status algo->smbus_xfer(adapter, addr, flags,
read_write, command,
protocol, data);
return res;
}
 shenlong1356
shenlong1356
 原创文章 144获赞 144访问量 9万+
关注
私信
展开阅读全文
原创文章 144获赞 144访问量 9万+
关注
私信
展开阅读全文
作者:shenlong1356
相关文章
Fawziya
2020-09-07
Adeline
2020-07-08
Eva
2020-01-06
Noya
2021-02-16
Meta
2023-07-22
Samira
2023-07-22
Ursula
2023-07-22
Radinka
2023-07-22
Gella
2023-07-22
Miette
2023-07-22
Zandra
2023-07-22
Kara
2023-07-22
Irma
2023-07-22
Kande
2023-08-08
Tricia
2023-08-08
Karli
2023-08-08
Ula
2023-08-08
Dulcea
2023-08-08
Malina
2023-08-08
Fawn
2023-08-08