C++基于灰度图上色GrayToColorFromOther的实现
目录
场景需求
功能函数代码
C++测试代码
场景需求之前有提到给灰度图上色的需求,在此基础上,还有一种需求,就是基于另一张参考灰度图的色板来给当前的灰度图上色,比如参考灰度图的数值区间为-10到10,颜色从蓝到绿再到红,而当前的灰度图的数据区间为-1到1,若基于参考灰度图的色板确定数据对应的颜色,则当前灰度图的颜色应该在绿色左右波动。
下方为具体实现函数和测试代码。
功能函数代码
/**
* @brief GrayToColorFromOther 灰度图上色,基于参考灰度图的色板
* @param phase1 输入的灰色图像,通道为1,提供色板
* @param phase2 输入的灰色图像,通道为1,基于phase1的色板绘色
* @return 上色后的图像
*/
cv::Mat GrayToColorFromOther(cv::Mat &phase1, cv::Mat &phase2)
{
CV_Assert(phase1.channels() == 1);
CV_Assert(phase2.channels() == 1);
if (phase1.empty() || phase2.empty())
{
cv::Mat result = cv::Mat::zeros(100, 100, CV_8UC3);
return result;
}
cv::Mat temp, result, mask;
double max1, min1;
int row = phase2.rows;
int col = phase2.cols;
// 确定参考灰度图的数据范围
cv::minMaxIdx(phase1, &min1, &max1, nullptr, nullptr, phase1 == phase1);
// 将当前灰度图以参考灰度图的数据范围作标准,进行数据变换
temp = phase2.clone();
for (int i = 0; i < row; ++i)
{
float *t2 = temp.ptr<float>(i);
for (int j = 0; j < col; ++j)
{
t2[j] = 255.0f*(phase2.at<float>(i, j) - min1) / (max1 - min1);
}
}
temp.convertTo(temp, CV_8UC1);
// 创建掩膜,目的是为了隔离nan值的干扰
mask = cv::Mat::zeros(phase2.size(), CV_8UC1);
mask.setTo(255, phase2 == phase2);
// 初始化三通道颜色图
cv::Mat color1, color2, color3;
color1 = cv::Mat::zeros(temp.size(), temp.type());
color2 = cv::Mat::zeros(temp.size(), temp.type());
color3 = cv::Mat::zeros(temp.size(), temp.type());
// 基于灰度图的灰度层级,给其上色,最底的灰度值0为蓝色(255,0,0),最高的灰度值255为红色(0,0,255),中间的灰度值127为绿色(0,255,0)
for (int i = 0; i < row; ++i)
{
uchar *c1 = color1.ptr<uchar>(i);
uchar *c2 = color2.ptr<uchar>(i);
uchar *c3 = color3.ptr<uchar>(i);
uchar *r = temp.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if (m[j] == 255)
{
if (r[j] > (3 * 255 / 4) && r[j] <= 255)
{
c1[j] = 255;
c2[j] = 4 * (255 - r[j]);
c3[j] = 0;
}
else if (r[j] <= (3 * 255 / 4) && r[j] > (255 / 2))
{
c1[j] = 255 - 4 * (3 * 255 / 4 - r[j]);
c2[j] = 255;
c3[j] = 0;
}
else if (r[j] <= (255 / 2) && r[j] > (255 / 4))
{
c1[j] = 0;
c2[j] = 255;
c3[j] = 4 * (255 / 2 - r[j]);
}
else if (r[j] <= (255 / 4) && r[j] >= 0)
{
c1[j] = 0;
c2[j] = 255 - 4 * (255 / 4 - r[j]);
c3[j] = 255;
}
else {
c1[j] = 0;
c2[j] = 0;
c3[j] = 0;
}
}
}
}
// 三通道合并,得到颜色图
vector<cv::Mat> images;
images.push_back(color3);
images.push_back(color2);
images.push_back(color1);
cv::merge(images, result);
return result;
}
C++测试代码
#include<iostream>
#include<opencv2/opencv.hpp>
#include<ctime>
using namespace std;
using namespace cv;
void UnitPolar(int squaresize, cv::Mat& mag,cv::Mat& ang);
void UnitCart(int squaresize, cv::Mat& x, cv::Mat& y);
cv::Mat GrayToColor(cv::Mat &phase);
cv::Mat GrayToColorFromOther(cv::Mat &phase1, cv::Mat &phase2);
int main(void)
{
cv::Mat mag, ang,result,result2;
UnitPolar(2001, mag, ang);
mag.at<float>(10, 10) = nan("");
cv::Mat mag2 = mag / 2;
result = GrayToColor(mag);
result2= GrayToColorFromOther(mag,mag2);
system("pause");
return 0;
}
void UnitPolar(int squaresize, cv::Mat& mag,cv::Mat& ang) {
cv::Mat x;
cv::Mat y;
UnitCart(squaresize, x, y); //产生指定范围内的指定数量点数,相邻数据跨度相同
// OpenCV自带的转换有精度限制,导致结果有一定差异性
//cv::cartToPolar(x, y, mag, ang, false); //坐标转换
mag = cv::Mat(x.size(), x.type());
ang = cv::Mat(x.size(), x.type());
int row = mag.rows;
int col = mag.cols;
float *m, *a, *xx, *yy;
for (int i = 0; i < row; ++i)
{
m = mag.ptr<float>(i);
a = ang.ptr<float>(i);
xx = x.ptr<float>(i);
yy = y.ptr<float>(i);
for (int j = 0; j < col; ++j)
{
m[j] = sqrt(xx[j] * xx[j] + yy[j] * yy[j]);
a[j] = atan2(yy[j], xx[j]);
}
}
}
void UnitCart(int squaresize, cv::Mat& x, cv::Mat& y) {
CV_Assert(squaresize % 2 == 1);
x.create(squaresize, squaresize, CV_32FC1);
y.create(squaresize, squaresize, CV_32FC1);
//设置边界
x.col(0).setTo(-1.0);
x.col(squaresize - 1).setTo(1.0f);
y.row(0).setTo(1.0);
y.row(squaresize - 1).setTo(-1.0f);
float delta = 2.0f / (squaresize - 1.0f); //两个元素的间隔
//计算其他位置的值
for (int i = 1; i < squaresize - 1; ++i) {
x.col(i) = -1.0f + i * delta;
y.row(i) = 1.0f - i * delta;
}
}
/**
* @brief GrayToColor 灰度图上色
* @param phase 输入的灰色图像,通道为1
* @return 上色后的图像
*/
cv::Mat GrayToColor(cv::Mat &phase)
{
CV_Assert(phase.channels() == 1);
cv::Mat temp, result, mask;
// 将灰度图重新归一化至0-255
cv::normalize(phase, temp, 255, 0, cv::NORM_MINMAX);
temp.convertTo(temp, CV_8UC1);
// 创建掩膜,目的是为了隔离nan值的干扰
mask = cv::Mat::zeros(phase.size(), CV_8UC1);
mask.setTo(255, phase == phase);
// 初始化三通道颜色图
cv::Mat color1, color2, color3;
color1 = cv::Mat::zeros(temp.size(), temp.type());
color2 = cv::Mat::zeros(temp.size(), temp.type());
color3 = cv::Mat::zeros(temp.size(), temp.type());
int row = phase.rows;
int col = phase.cols;
// 基于灰度图的灰度层级,给其上色,最底的灰度值0为蓝色(255,0,0),最高的灰度值255为红色(0,0,255),中间的灰度值127为绿色(0,255,0)
// 不要惊讶蓝色为什么是(255,0,0),因为OpenCV中是BGR而不是RGB
for (int i = 0; i < row; ++i)
{
uchar *c1 = color1.ptr<uchar>(i);
uchar *c2 = color2.ptr<uchar>(i);
uchar *c3 = color3.ptr<uchar>(i);
uchar *r = temp.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if (m[j] == 255)
{
if (r[j] > (3 * 255 / 4) && r[j] <= 255)
{
c1[j] = 255;
c2[j] = 4 * (255 - r[j]);
c3[j] = 0;
}
else if (r[j] <= (3 * 255 / 4) && r[j] > (255 / 2))
{
c1[j] = 255 - 4 * (3 * 255 / 4 - r[j]);
c2[j] = 255;
c3[j] = 0;
}
else if (r[j] <= (255 / 2) && r[j] > (255 / 4))
{
c1[j] = 0;
c2[j] = 255;
c3[j] = 4 * (255 / 2 - r[j]);
}
else if (r[j] <= (255 / 4) && r[j] >= 0)
{
c1[j] = 0;
c2[j] = 255 - 4 * (255 / 4 - r[j]);
c3[j] = 255;
}
else {
c1[j] = 0;
c2[j] = 0;
c3[j] = 0;
}
}
}
}
// 三通道合并,得到颜色图
vector<cv::Mat> images;
images.push_back(color3);
images.push_back(color2);
images.push_back(color1);
cv::merge(images, result);
return result;
}
/**
* @brief GrayToColorFromOther 灰度图上色,基于参考灰度图的色板
* @param phase1 输入的灰色图像,通道为1,提供色板
* @param phase2 输入的灰色图像,通道为1,基于phase1的色板绘色
* @return 上色后的图像
*/
cv::Mat GrayToColorFromOther(cv::Mat &phase1, cv::Mat &phase2)
{
CV_Assert(phase1.channels() == 1);
CV_Assert(phase2.channels() == 1);
if (phase1.empty() || phase2.empty())
{
cv::Mat result = cv::Mat::zeros(100, 100, CV_8UC3);
return result;
}
cv::Mat temp, result, mask;
double max1, min1;
int row = phase2.rows;
int col = phase2.cols;
// 确定参考灰度图的数据范围
cv::minMaxIdx(phase1, &min1, &max1, nullptr, nullptr, phase1 == phase1);
// 将当前灰度图以参考灰度图的数据范围作标准,进行数据变换
temp = phase2.clone();
for (int i = 0; i < row; ++i)
{
float *t2 = temp.ptr<float>(i);
for (int j = 0; j < col; ++j)
{
t2[j] = 255.0f*(phase2.at<float>(i, j) - min1) / (max1 - min1);
}
}
temp.convertTo(temp, CV_8UC1);
// 创建掩膜,目的是为了隔离nan值的干扰
mask = cv::Mat::zeros(phase2.size(), CV_8UC1);
mask.setTo(255, phase2 == phase2);
// 初始化三通道颜色图
cv::Mat color1, color2, color3;
color1 = cv::Mat::zeros(temp.size(), temp.type());
color2 = cv::Mat::zeros(temp.size(), temp.type());
color3 = cv::Mat::zeros(temp.size(), temp.type());
// 基于灰度图的灰度层级,给其上色,最底的灰度值0为蓝色(255,0,0),最高的灰度值255为红色(0,0,255),中间的灰度值127为绿色(0,255,0)
for (int i = 0; i < row; ++i)
{
uchar *c1 = color1.ptr<uchar>(i);
uchar *c2 = color2.ptr<uchar>(i);
uchar *c3 = color3.ptr<uchar>(i);
uchar *r = temp.ptr<uchar>(i);
uchar *m = mask.ptr<uchar>(i);
for (int j = 0; j < col; ++j)
{
if (m[j] == 255)
{
if (r[j] > (3 * 255 / 4) && r[j] <= 255)
{
c1[j] = 255;
c2[j] = 4 * (255 - r[j]);
c3[j] = 0;
}
else if (r[j] <= (3 * 255 / 4) && r[j] > (255 / 2))
{
c1[j] = 255 - 4 * (3 * 255 / 4 - r[j]);
c2[j] = 255;
c3[j] = 0;
}
else if (r[j] <= (255 / 2) && r[j] > (255 / 4))
{
c1[j] = 0;
c2[j] = 255;
c3[j] = 4 * (255 / 2 - r[j]);
}
else if (r[j] <= (255 / 4) && r[j] >= 0)
{
c1[j] = 0;
c2[j] = 255 - 4 * (255 / 4 - r[j]);
c3[j] = 255;
}
else {
c1[j] = 0;
c2[j] = 0;
c3[j] = 0;
}
}
}
}
// 三通道合并,得到颜色图
vector<cv::Mat> images;
images.push_back(color3);
images.push_back(color2);
images.push_back(color1);
cv::merge(images, result);
return result;
}
测试效果
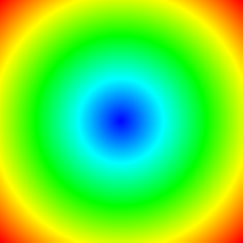
图1 参考灰度图上色效果
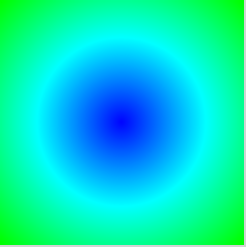
图2 基于参考灰度图色板的上色效果
如上图所示,为了方便,我生成了一个2001*2001的图像矩阵,并设置了另一个对比图像,该图像为原图像的1/2,那么原图像就是参考灰度图,而对比图像就是需要基于参考灰度图色板上色的灰度图。图1为参考灰度图的上色效果,图2是基于参考灰度图色板给对比图像上色的效果图。原图像的数据从0-1.3左右,其颜色变化从蓝到绿再到红,而对比图像的数据从0-1.3/2左右,则颜色变化为蓝到绿,满足了前面提到的需求。
到此这篇关于C++基于灰度图上色GrayToColorFromOther的实现的文章就介绍到这了,更多相关C++ 灰度图上色GrayToColorFromOther内容请搜索软件开发网以前的文章或继续浏览下面的相关文章希望大家以后多多支持软件开发网!