AlexNet、VGG11、NiN、GoogLeNet等网络的Pytorch实现
由于受到计算机性能的影响,虽然LeNet在图像分类中取得了较好的成绩,但是并没有引起很多的关注。 知道2012年,Alex等人提出的AlexNet网络在ImageNet大赛上以远超第二名的成绩夺冠,卷积神经网络乃至深度学习重新引起了广泛的关注
AlexNet是在LeNet的基础上加深了网络的结构,学习更丰富更高维的图像特征。AlexNet的特点:
更深的网络结构
使用层叠的卷积层,即卷积层+卷积层+池化层来提取图像的特征
使用Dropout抑制过拟合
使用数据增强Data Augmentation(如翻转、裁剪和颜色变化)抑制过拟合
使用Relu替换之前的sigmoid的作为激活函数
多GPU训练
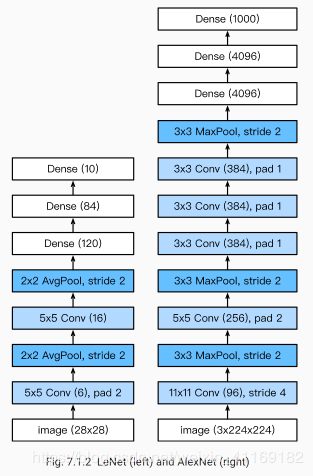
8层变换,其中有5层卷积和2层全连接隐藏层,以及1个全连接输出层
AlexNet首次证明了学习到的特征可以超越⼿⼯设计的特征,从而⼀举打破计算机视觉研究的前状。
(左边是LeNet的网络结构,右边是AlexNet的网络结构)
!pip install torchtext
import time
import torch
from torch import nn, optim
import torchvision
import numpy as np
from utils improt *
import os
import torch.nn.functional as F
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
#由于使用CPU镜像,精简网络,若为GPU镜像可添加该层
#nn.Linear(4096, 4096),
#nn.ReLU(),
#nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
net = AlexNet()
print(net)
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = load_data_fashion_mnist(batch_size,224)
for X, Y in train_iter:
print('X =', X.shape,
'\nY =', Y.type(torch.int32))
break
lr, num_epochs = 0.001, 3
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
在亚马逊提供的Tesla K40的GPU下,一个epochs需要的时间是4min左右
 自己电脑一个epochs需要的时间高达
自己电脑一个epochs需要的时间高达

VGG16相比AlexNet的一个改进是采用连续的几个3×33\times33×3的卷积核代替AlexNet中的较大卷积核(11×11,7×7,5×5)(11\times 11,7 \times 7,5\times 5)(11×11,7×7,5×5)。对于给定的感受野(与输出有关的输入图片的局部大小),采用堆积的小卷积核是优于采用大的卷积核,因为多层非线性层可以增加网络深度来保证学习更复杂的模式,而且代价还比较小(参数更少)。
比如,333个步长为111的3×33\times33×3卷积核的一层层叠加作用可看成一个大小为7的感受野(其实就表示333个3×33\times33×3连续卷积相当于一个7×77\times 77×7卷积),其参数总量为 3×9×C2)3\times9 \times C^2)3×9×C2) ,如果直接使用$7x7卷积核,其参数总量为 49×C249 \times C^249×C2,这里 C 指的是输入和输出的通道数。很明显,27×C227 \times C^227×C2 小于7×77\times 77×7,即减少了参数;而且3×33\times 33×3卷积核有利于更好地保持图像性质。
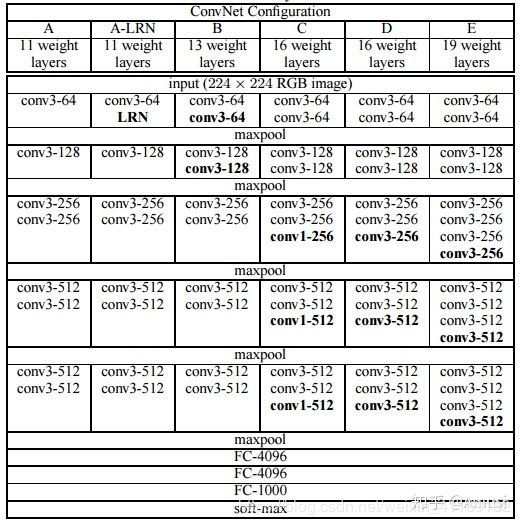
VGG网络结构参数(C是VGG16、E是VGG19)
优点:
1、VGGNet的结构非常简洁,整个网络都使用了同样大小的卷积核尺寸(3x3)和最大池化尺寸(2x2)。
2、几个小滤波器(3x3)卷积层的组合比一个大滤波器(5x5或7x7)卷积层好
3、验证了通过不断加深网络结构可以提升性能。
缺点:
VGG耗费更多计算资源,并且使用了更多的参数,导致更多的内存占用(140M)。其中绝大多数的参数都是来自于第一个全连接层。
很多pretrained的方法就是使用VGG的model(主要是16和19),VGG相对其他的方法,参数空间很大,最终的model有500多m,AlexNet只有200m, GoogLeNet更少,所以train一个vgg模型通常要花费更长的时间,所幸有公开的pretrained model让我们很方便的使用。
def vgg_block(num_convs, in_channels, out_channels): #卷积层个数,输入通道数,输出通道数
blk = []
for i in range(num_convs):
if i == 0:
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
else:
blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.ReLU())
blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 这里会使宽高减半
return nn.Sequential(*blk)
conv_arch = ((1, 1, 64), (1, 64, 128), (2, 128, 256), (2, 256, 512), (2, 512, 512))
# 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7
fc_features = 512 * 7 * 7 # c * w * h
fc_hidden_units = 4096 # 任意
def vgg(conv_arch, fc_features, fc_hidden_units=4096):
net = nn.Sequential()
# 卷积层部分
for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch):
# 每经过一个vgg_block都会使宽高减半
net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels))
# 全连接层部分
net.add_module("fc", nn.Sequential(FlattenLayer(),
nn.Linear(fc_features, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, 10)
))
return net
net = vgg(conv_arch, fc_features, fc_hidden_units)
X = torch.rand(1, 1, 224, 224)
# named_children获取一级子模块及其名字(named_modules会返回所有子模块,包括子模块的子模块)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
ratio = 8
small_conv_arch = [(1, 1, 64//ratio), (1, 64//ratio, 128//ratio), (2, 128//ratio, 256//ratio),
(2, 256//ratio, 512//ratio), (2, 512//ratio, 512//ratio)]
net = vgg(small_conv_arch, fc_features // ratio, fc_hidden_units // ratio)
print(net)
batchsize=16
#batch_size = 64
# 如出现“out of memory”的报错信息,可减小batch_size或resize
# train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
NiN
NiN摘要
传统的CNN,就简单使用data patch与filter做内积,然后就求出来的值送入激活函数ReLU中。如果表示相同概念的data patch稍有不同的话,那么与filter做完内积的值也会变化(可能会和之前结果相差甚远),这显然不是我们想要的结果,我们想要不变性。所以作者提出了NIN,用来提高卷积层的抽象能力。
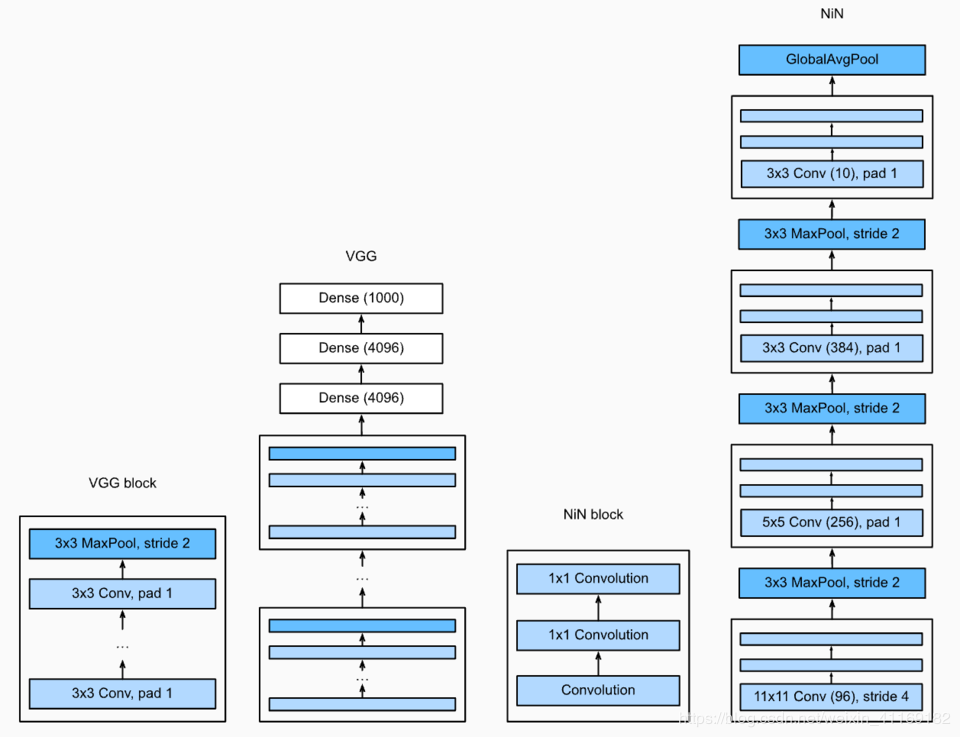
NiN重复使⽤由卷积层和代替全连接层的1×1卷积层构成的NiN块来构建深层⽹络。
NiN去除了容易造成过拟合的全连接输出层,而是将其替换成输出通道数等于标签类别数 的NiN块和全局平均池化层。
NiN的以上设计思想影响了后⾯⼀系列卷积神经⽹络的设计。
 1×1卷积核作用
1×1卷积核作用
1.放缩通道数:通过控制卷积核的数量达到通道数的放缩。
2.增加非线性。1×1卷积核的卷积过程相当于全连接层的计算过程,并且还加入了非线性激活函数,从而可以增加网络的非线性。
3.计算参数少
def nin_block(in_channels, out_channels, kernel_size, stride, padding):
blk = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
return blk
# 已保存在d2lzh_pytorch
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, stride=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, stride=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, stride=1, padding=1),
GlobalAvgPool2d(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
FlattenLayer())
X = torch.rand(1, 1, 224, 224)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.002, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
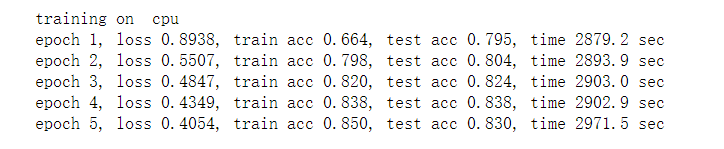
训练结果

class Inception(nn.Module):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, in_c, c1, c2, c3, c4):
super(Inception, self).__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_c, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_c, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_c, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_c, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) # 在通道维上连结输出
GoogLeNet完整结构
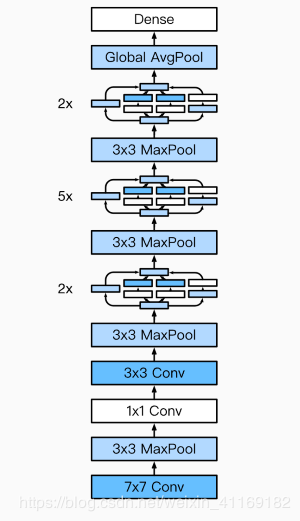
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
GlobalAvgPool2d())
net = nn.Sequential(b1, b2, b3, b4, b5,
FlattenLayer(), nn.Linear(1024, 10))
net = nn.Sequential(b1, b2, b3, b4, b5, FlattenLayer(), nn.Linear(1024, 10))
X = torch.rand(1, 1, 96, 96)
for blk in net.children():
X = blk(X)
print('output shape: ', X.shape)
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
除了这个模型没在本地上运行,其他都跑了一遍
作者:超级无敌吉士堡