【ROBOGUIDE仿真】: 带传送链的机器人输运工作站
带传送链的机器人输运工作站仿真效果演示在这里插入图片描述一、工作任务:二、任务描述:三、任务实施创建机器人工作站仿真环境创建机器人工作单元Workcell的仿真环境工作站布局添加爪手添加fixture与part添加传送带和Link在各个所需位置添加part示教编程与调试设置 pick和drop设置Link上的IO信号示教点与Home点的设定示教与编程四、结果分析
仿真效果演示
 一、工作任务:
一、工作任务:
 关爪
关爪
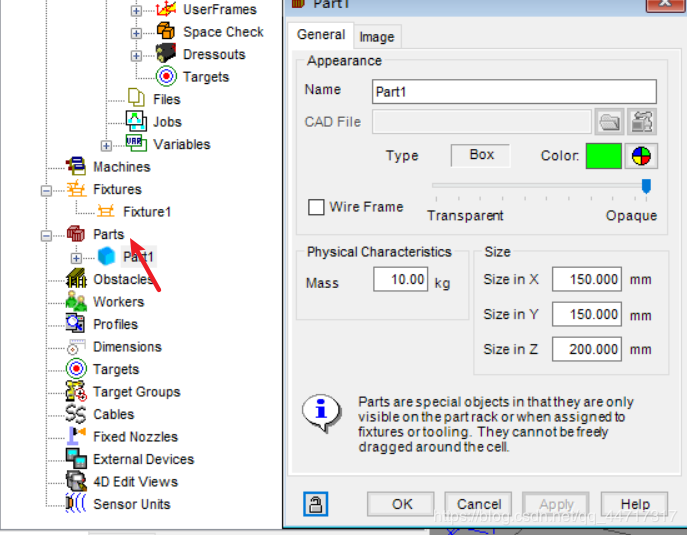
 添加fixture与part
fixture
添加fixture与part
fixture
 part
part
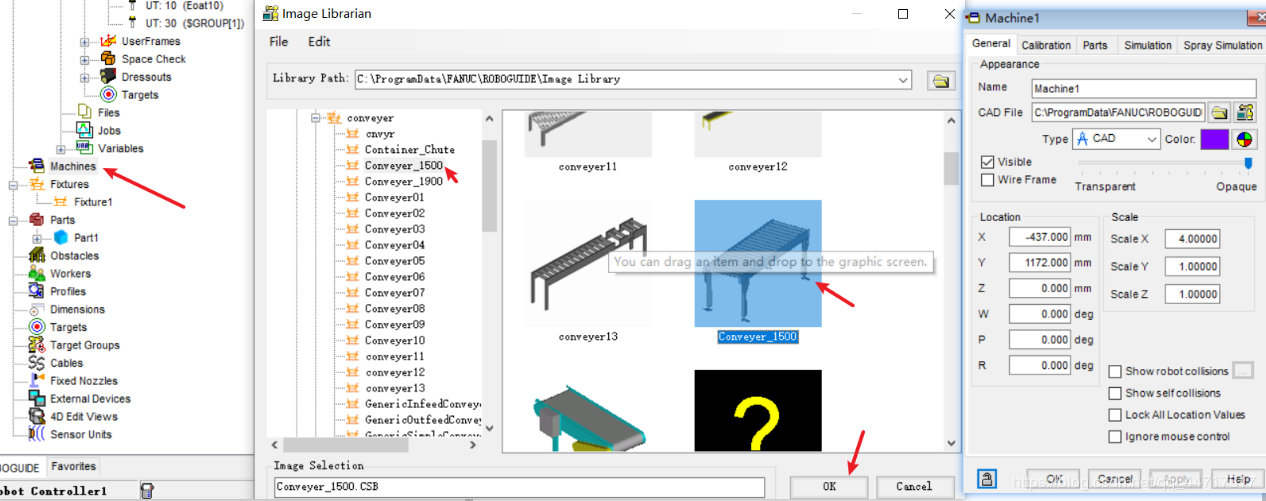
 添加传送带和Link
machine 传送带
添加传送带和Link
machine 传送带
 Link
Link
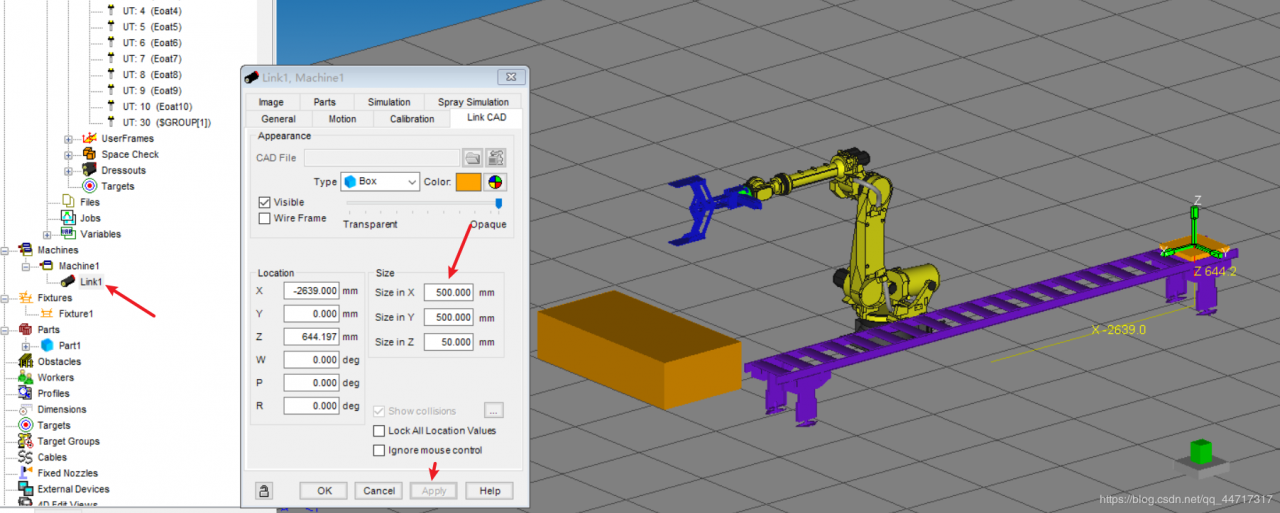 设置Link的电机参数
设置Link的电机参数
 在各个所需位置添加part
在各个所需位置添加part
作者:Lukey Alvin
一、工作任务:
使用Robot、Machine、Link和附加part等,建立并调通一个物料通过输送带运输,与机器人搬运的综合项目。
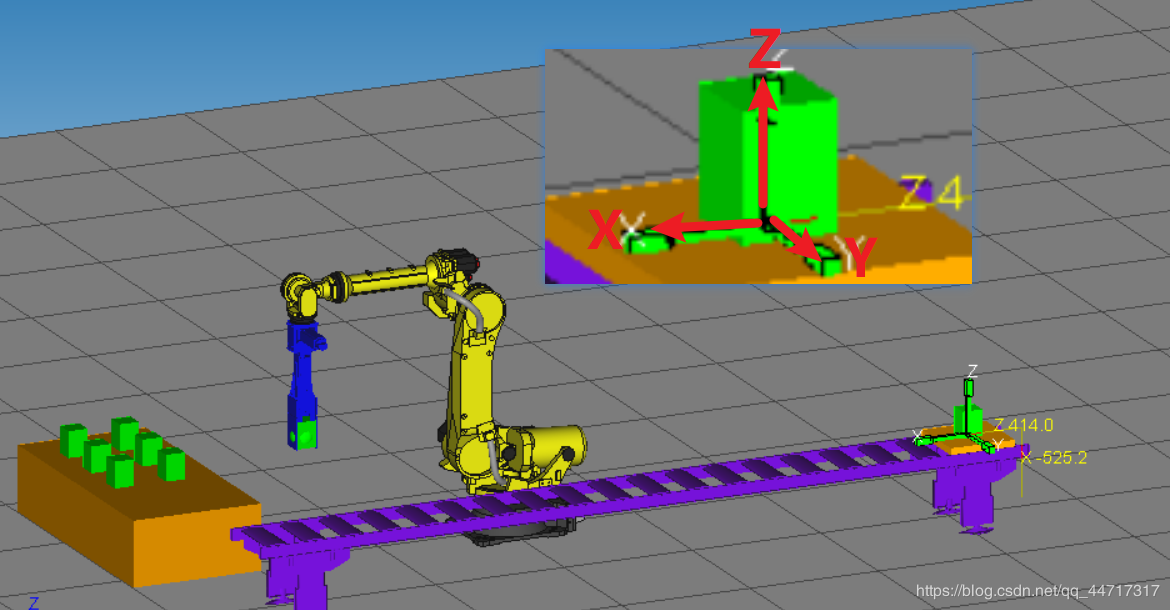
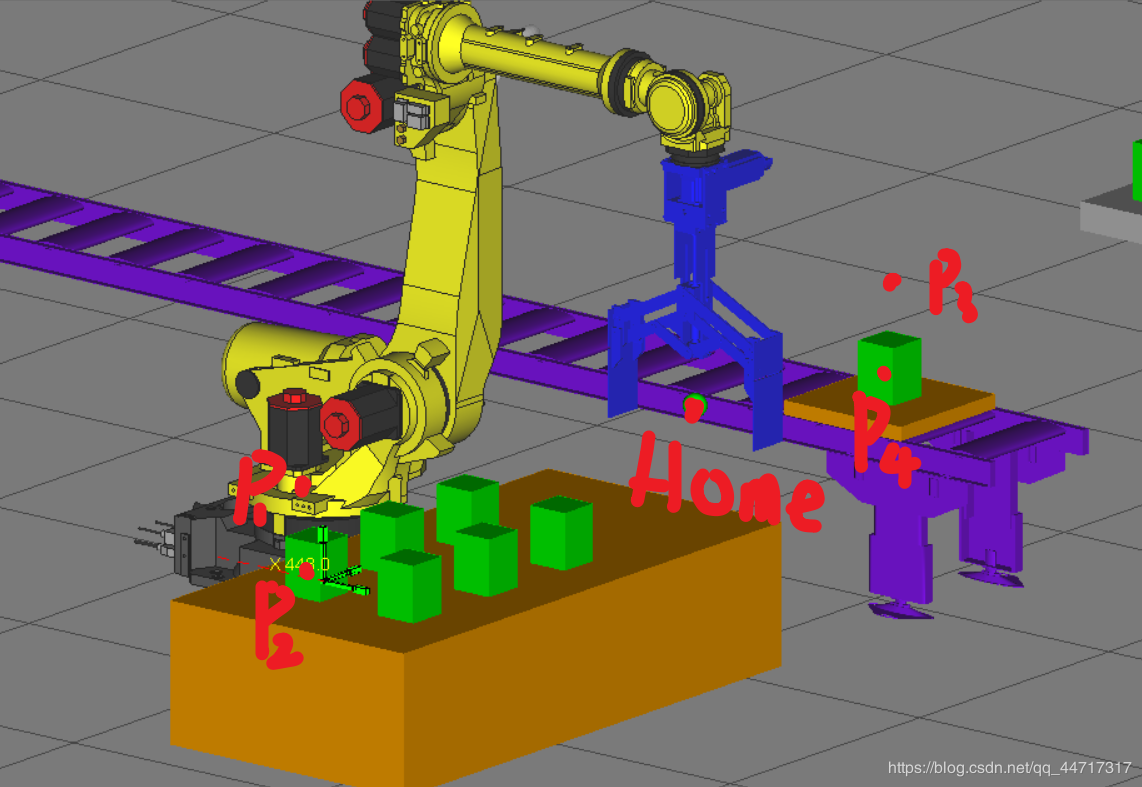
二、任务描述:如图所示,物料盘加载物料通过传送带从0mm处,运输到输送带的另外一端。然后使机器人从物料台上抓取物料,放置到一个物料筐内。机器人抓取之后,物料盘返回0mm处加载另一个物料。编制程序,使得该动作执行。
注意编程要求:
1、需完成一个3X2的垛盘搬运 2、速度安全且合适 3、抓/放给出适当停顿 三、任务实施 创建机器人工作站仿真环境此处创建一个默认的工作站即可,创建过程详细见:
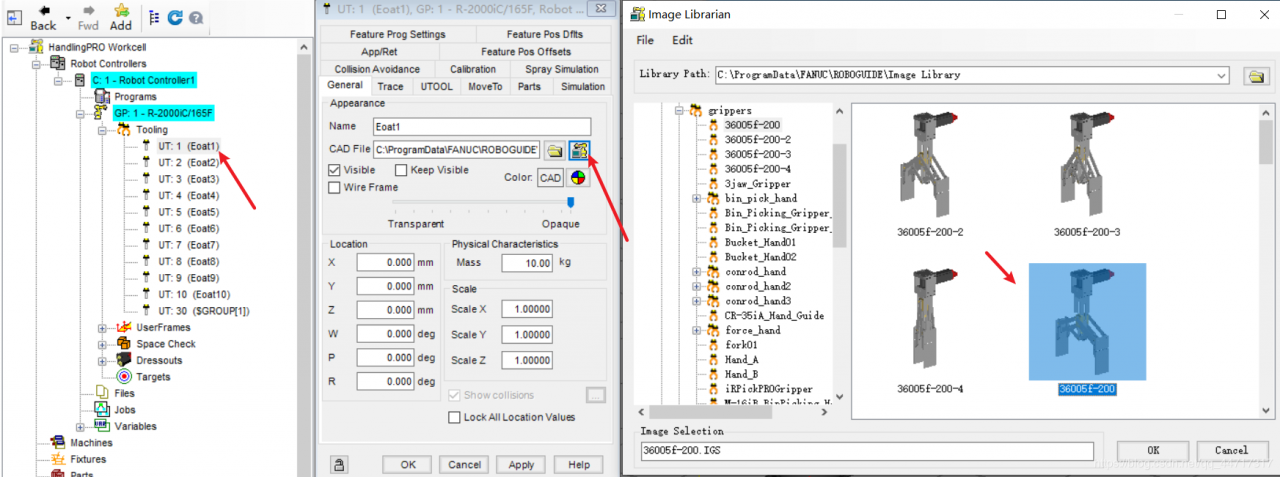
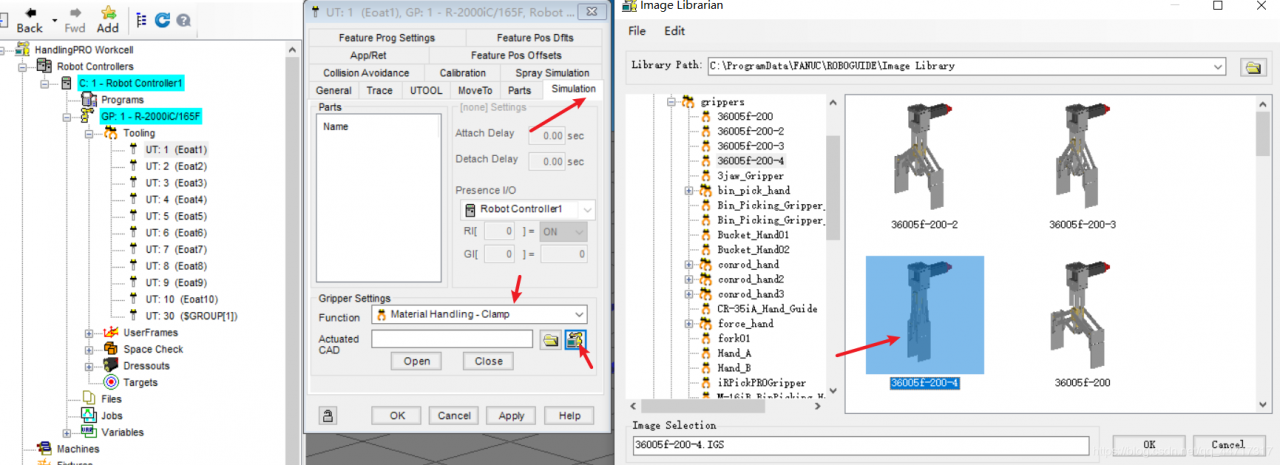
创建机器人工作单元Workcell的仿真环境 工作站布局 添加爪手 开爪
关爪
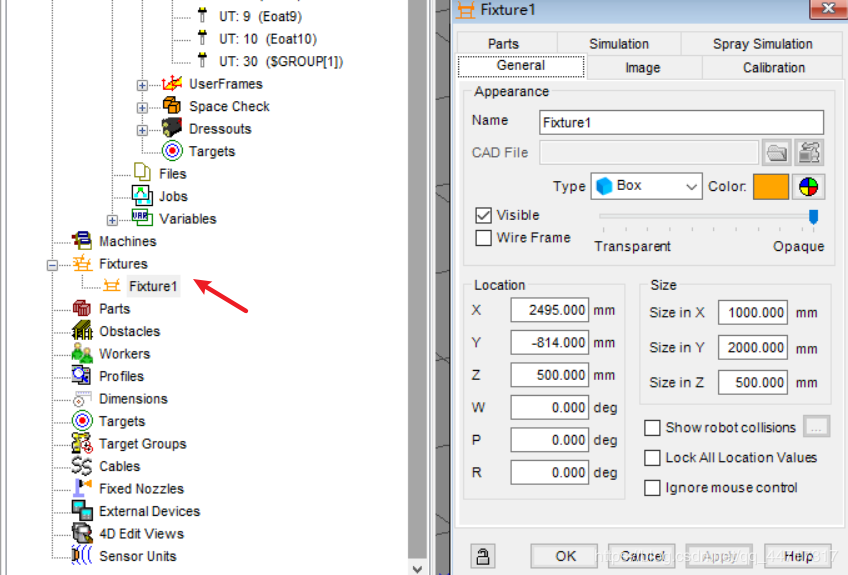
添加fixture与part
fixture
part
添加传送带和Link
machine 传送带
Link
设置Link的电机参数
在各个所需位置添加part
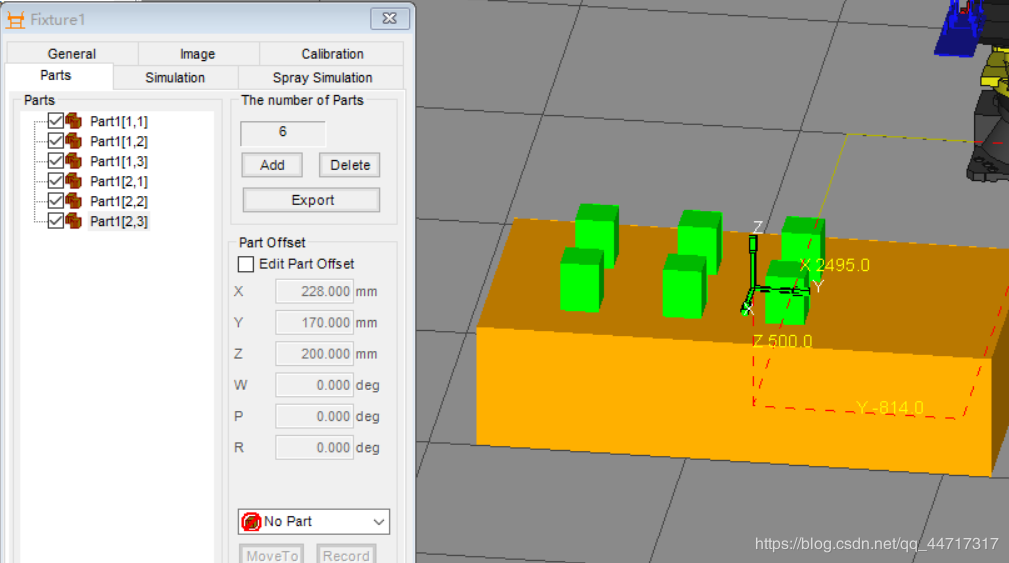
类似的,需要在爪手和Links上添加part,不做赘述,最终效果如下:
注意各个Part的方向必须保持一致!
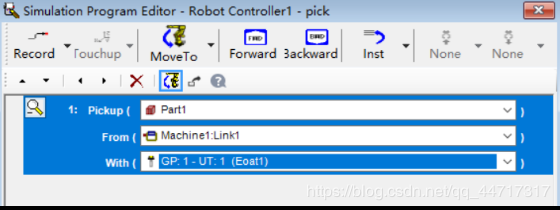
Teach-Add Simulation Program,输入pick然后添加如下内容,并保存;
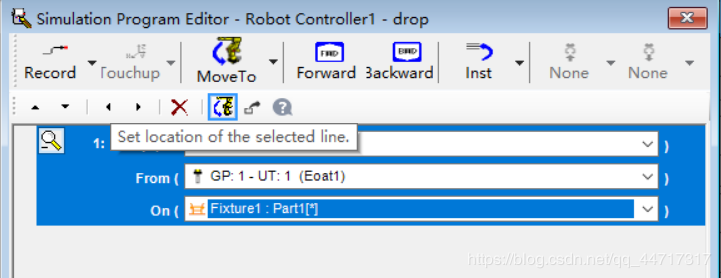
同理,添加drop程序,并保存;
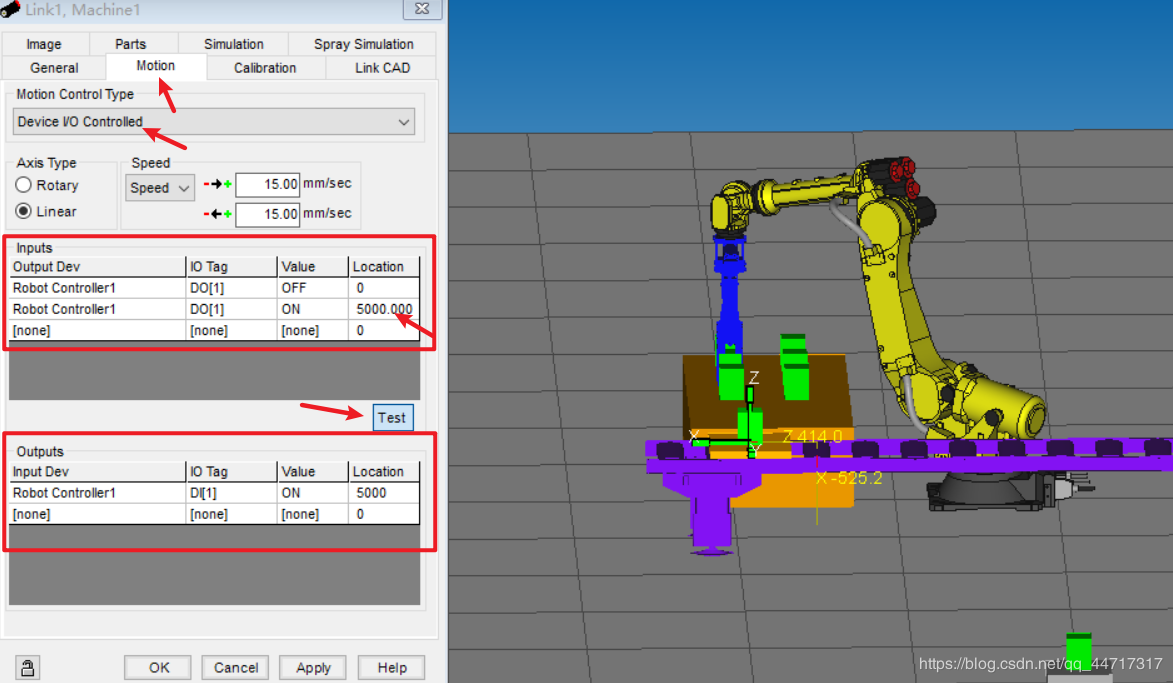
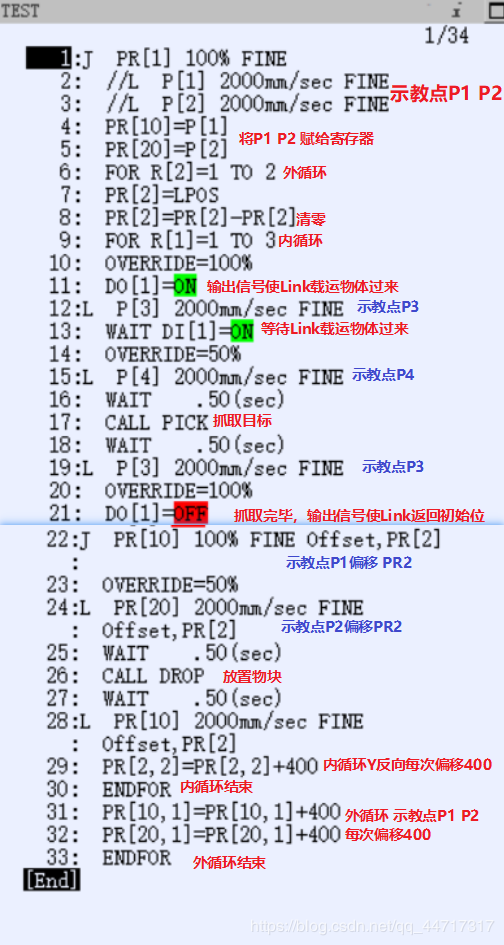
选择Io控制,输出信号有两个,一个是其实位置0,一个是到达位置5000,当机器人追备好抓取时,释放信号DO1=ON,这时Link会以设定的速度载着物块走向机器人,当机器人收到DO1=ON的信号时,开始抓取,抓取后会释放DO1=OFF让Link返回原来的位置;以此实现通讯;(设置的时候可以用Test选项进行测试)
一共示教四个点和一个Home点,示教点分别是Fixture的part的上方,以及抓取位;Link的part的上方以及抓取位;Home点的关节坐标(0,0,0,0,-90,0)
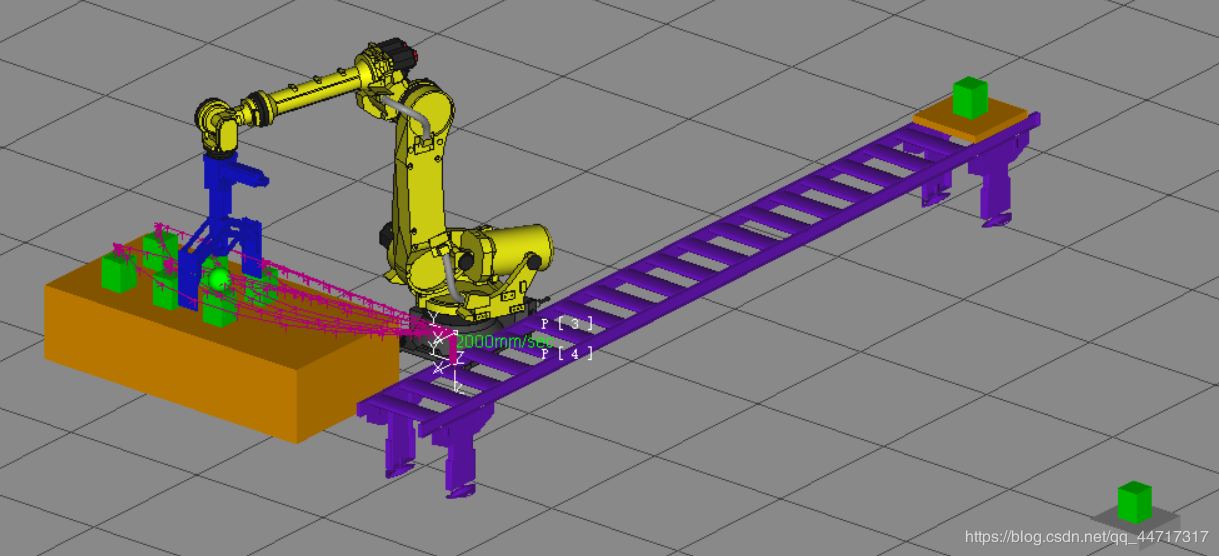
仿真结果(带TCP的轨迹截图)如下:
作者:Lukey Alvin