TRIZ创新方法#学习笔记02# |系统分析:功能分析和技术矛盾
【系统分析之功能分析】
目录
完整的技术系统 功能描述 功能分析 实例探讨一、完整的技术系统
概念:通过设计制造完成的特定功能的系统。
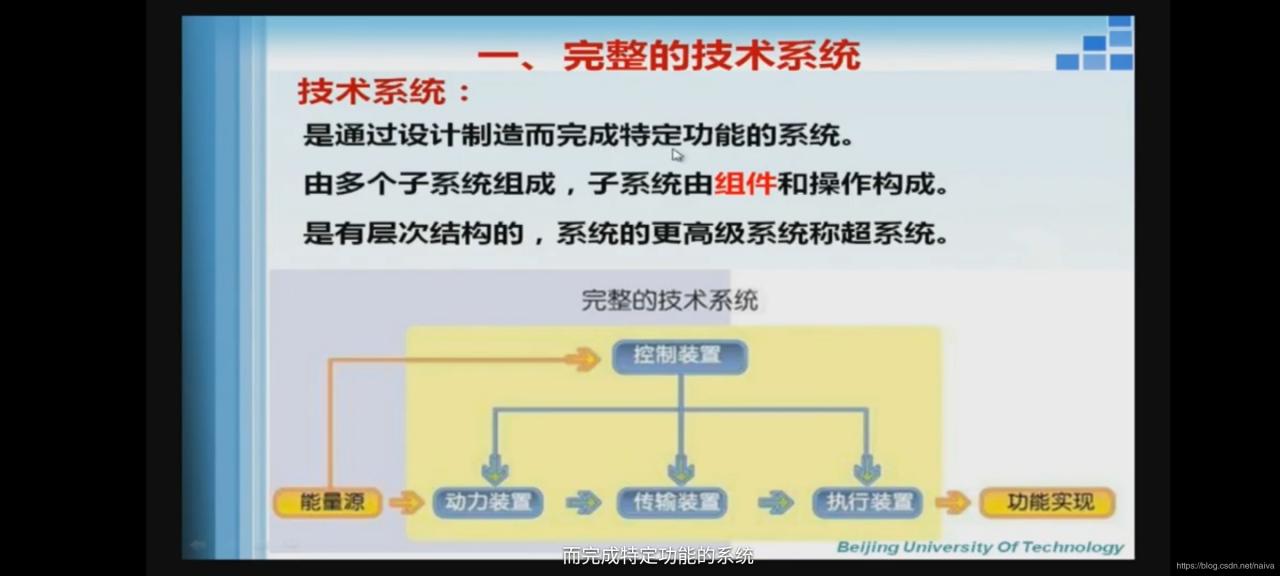
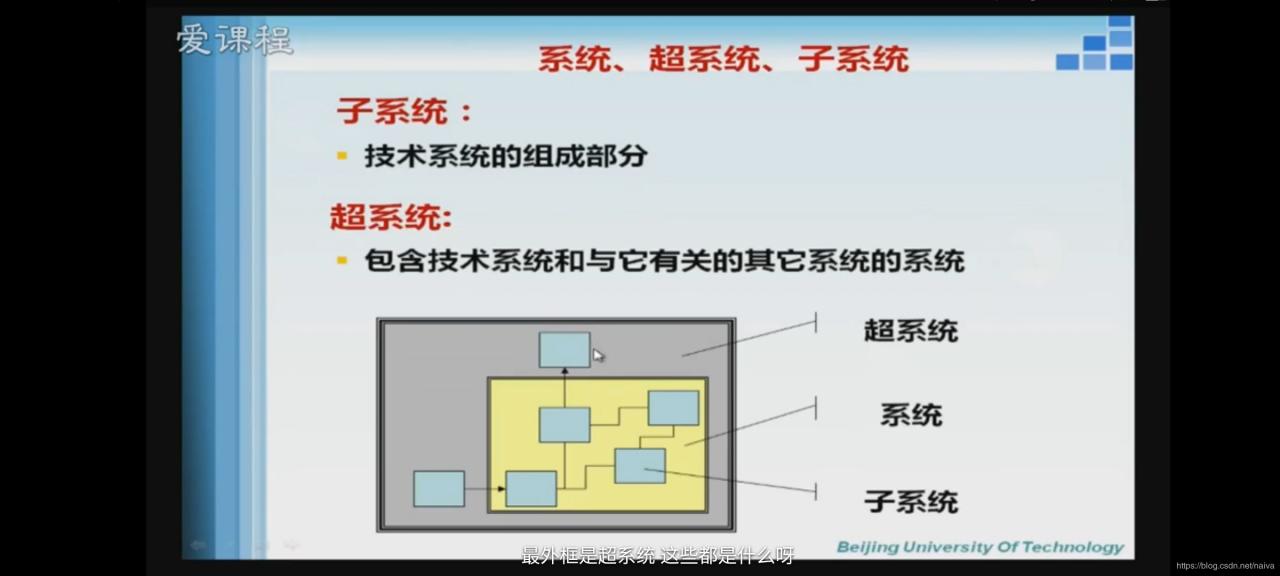
超系统、系统、子系统
系统:通过设计制造完成具有特定功能的系统。 子系统: 系统的组成部分,由组件和操作构成。 超系统: 包含技术系统和与其有关的其他系统的系统(有点绕~)例如:齿轮箱系统
子系统:齿轮、轴、轴承
超系统:电机、带轮、链轮(学机械的同学应该很熟悉)
组件:
超系统、技术系统、子系统中的某一组成对象。 物质/场组成的某一对象。(难理解) 物质 场 (光、空气等等)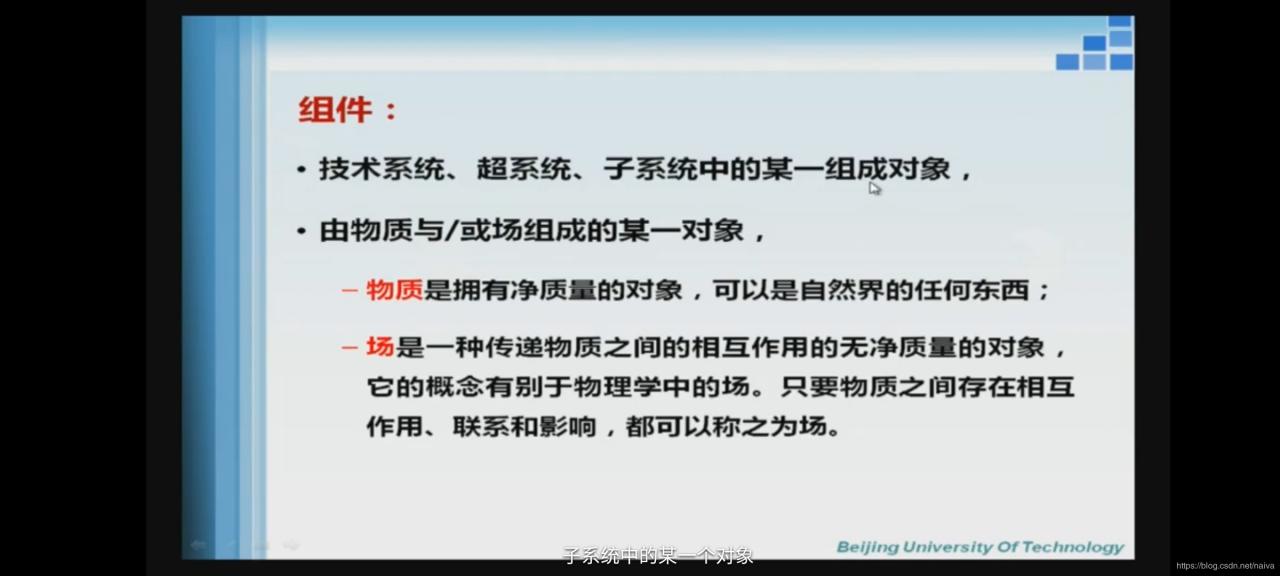
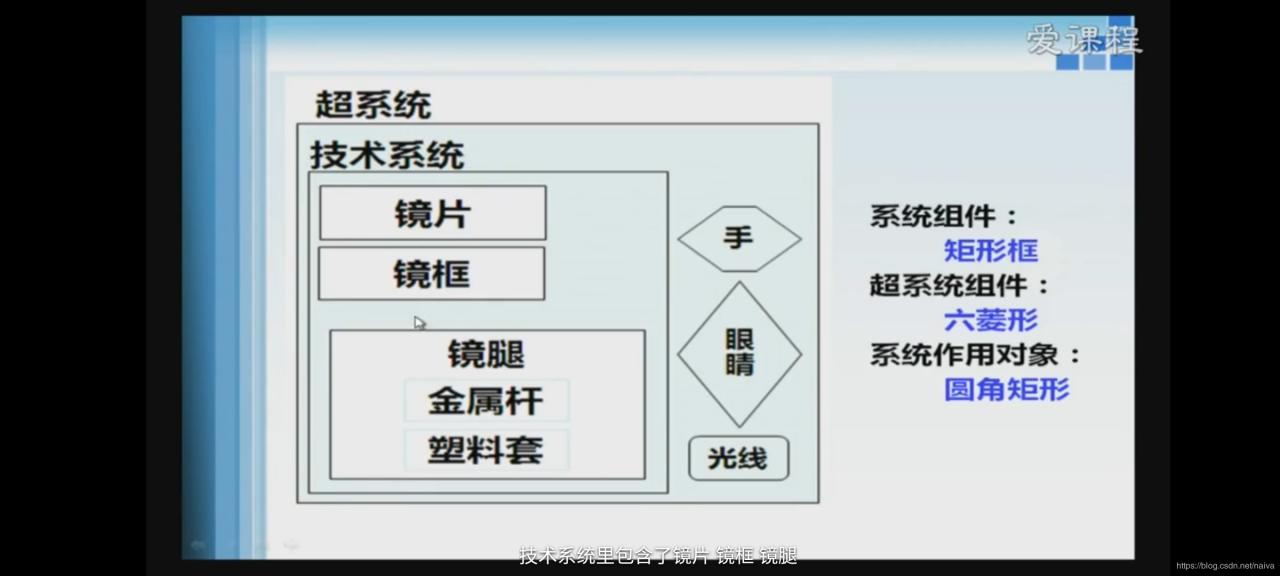
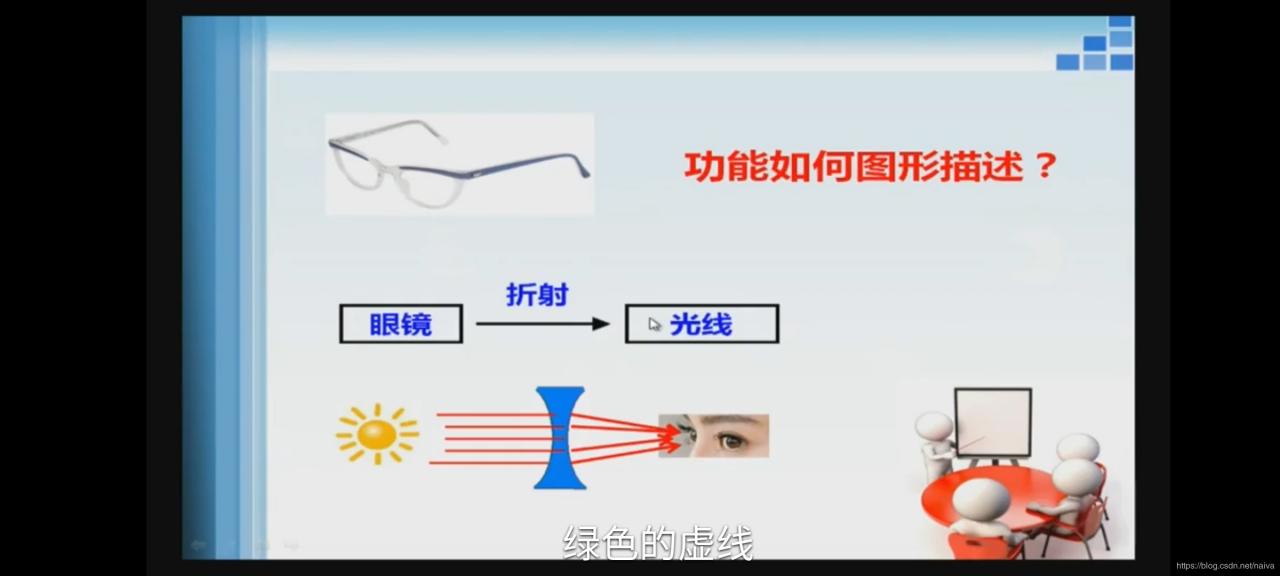
例如:近视眼镜
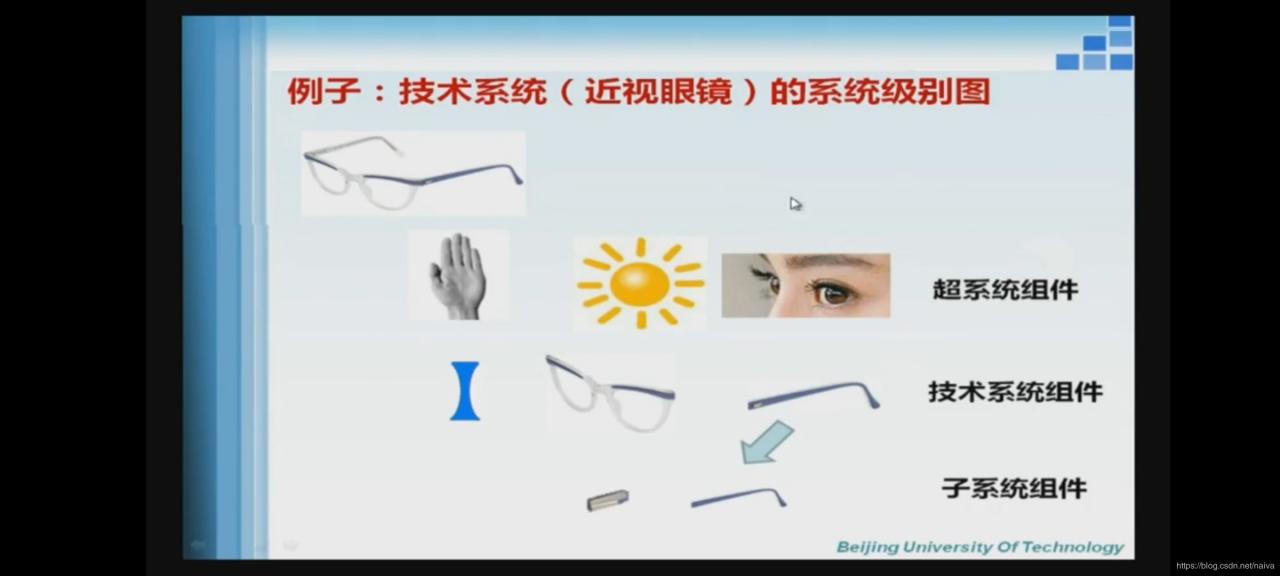
框图表示如下:
注意系统组件表示的时候用矩形,超系统组件则用六菱,系统作用对象用圆角矩形框图。
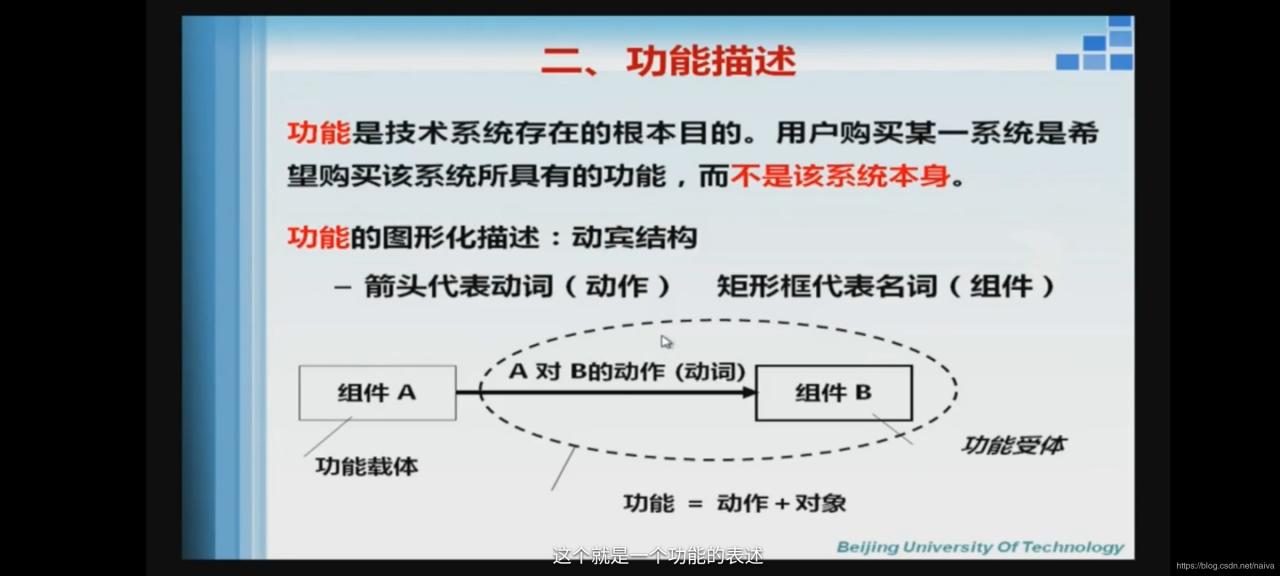
二、功能描述
概念:功能是技术系统存在的根本目的。用户购买某一系统是希望购买该系统的功能,而不是该系统本身。 动宾结构
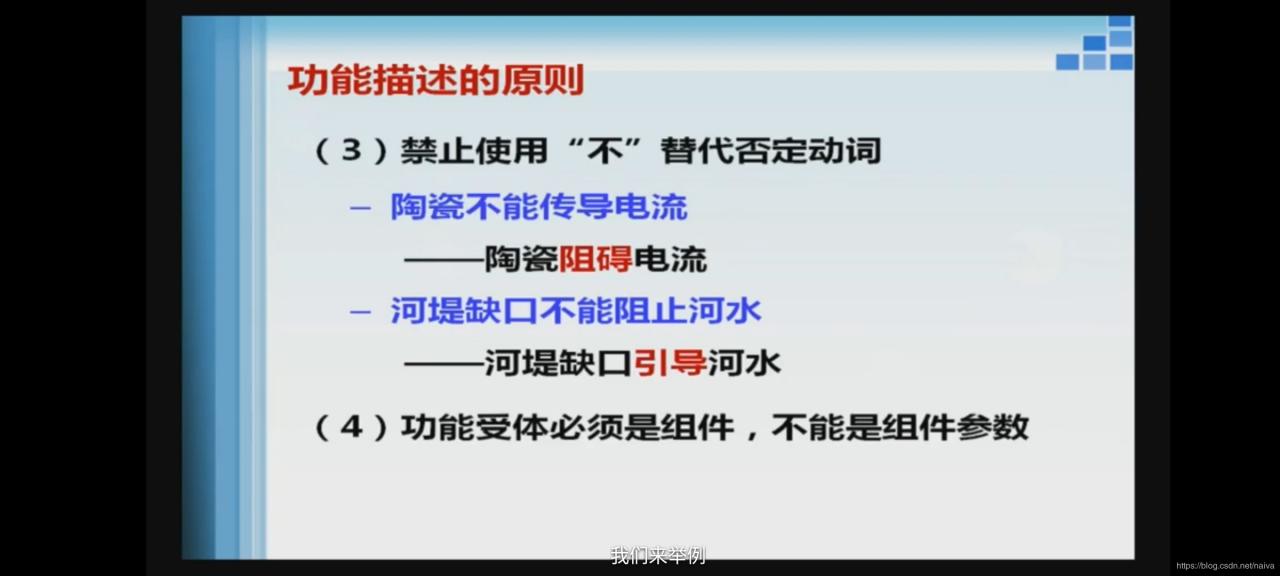
功能描述的原则
功能=动作+对象 功能受体至少要有一个参数受到影响 禁止使用不代替否定字 功能受体必须是组件,而不是组件参数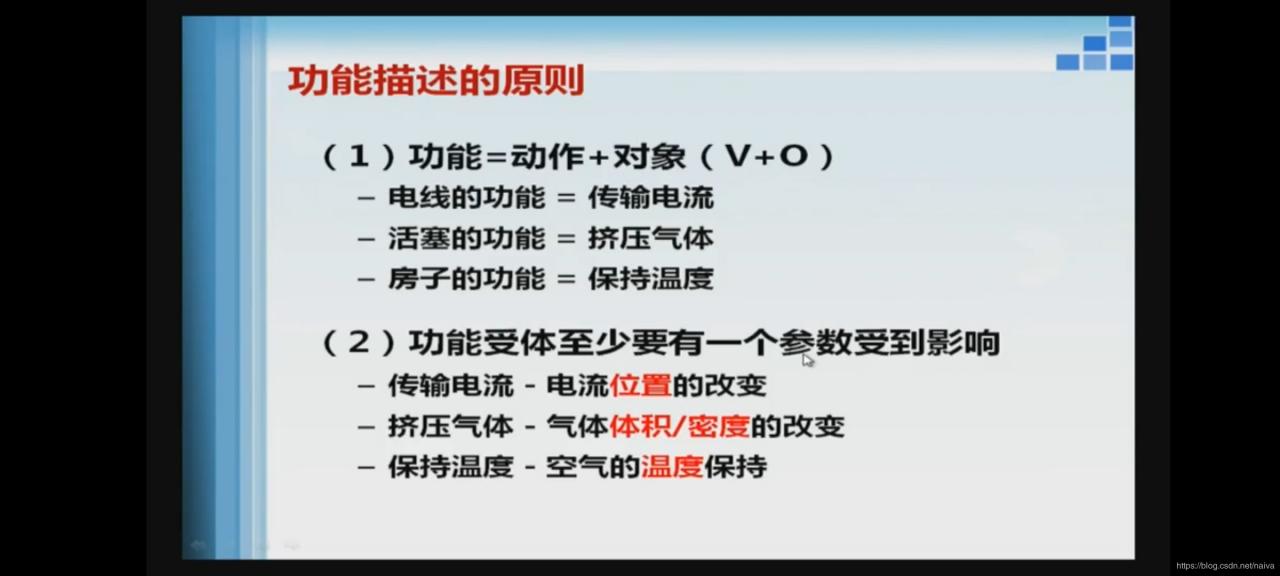
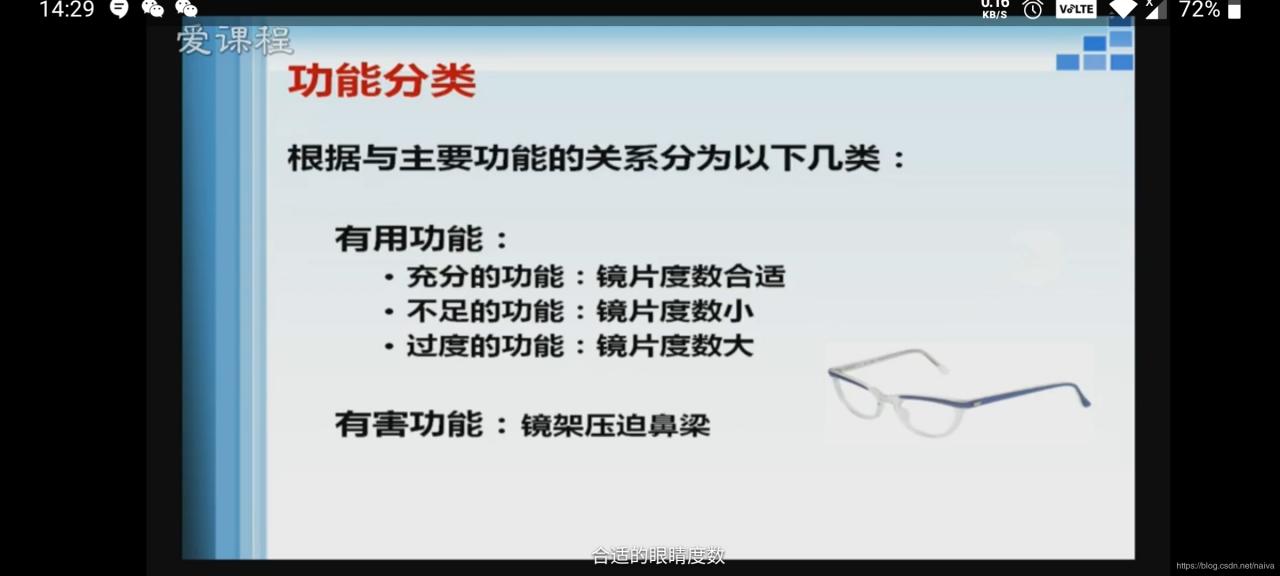
功能分类
充分功能 不足功能 过度功能 有害功能以近视眼镜为例
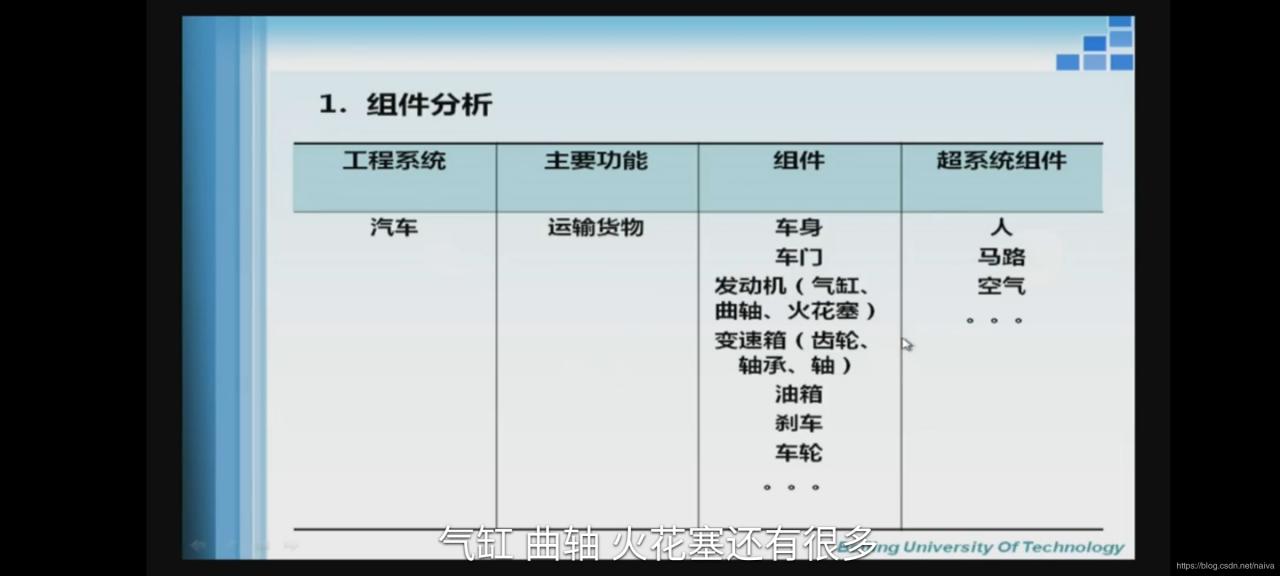
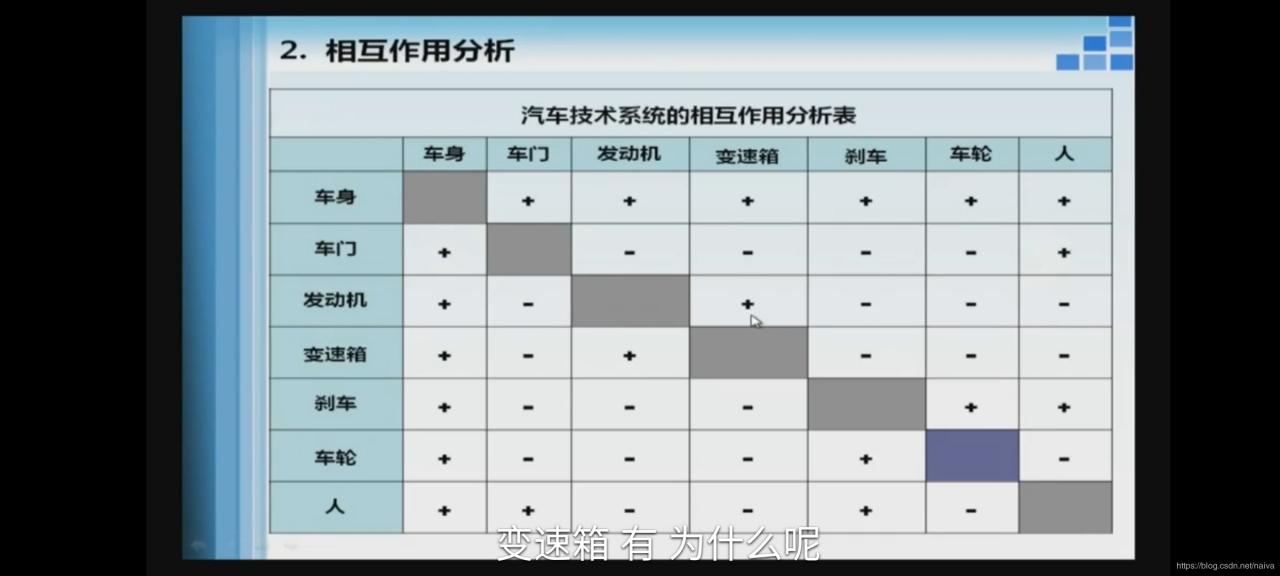
三、功能分析
组件分析 组件相互作用分析 建立功能模型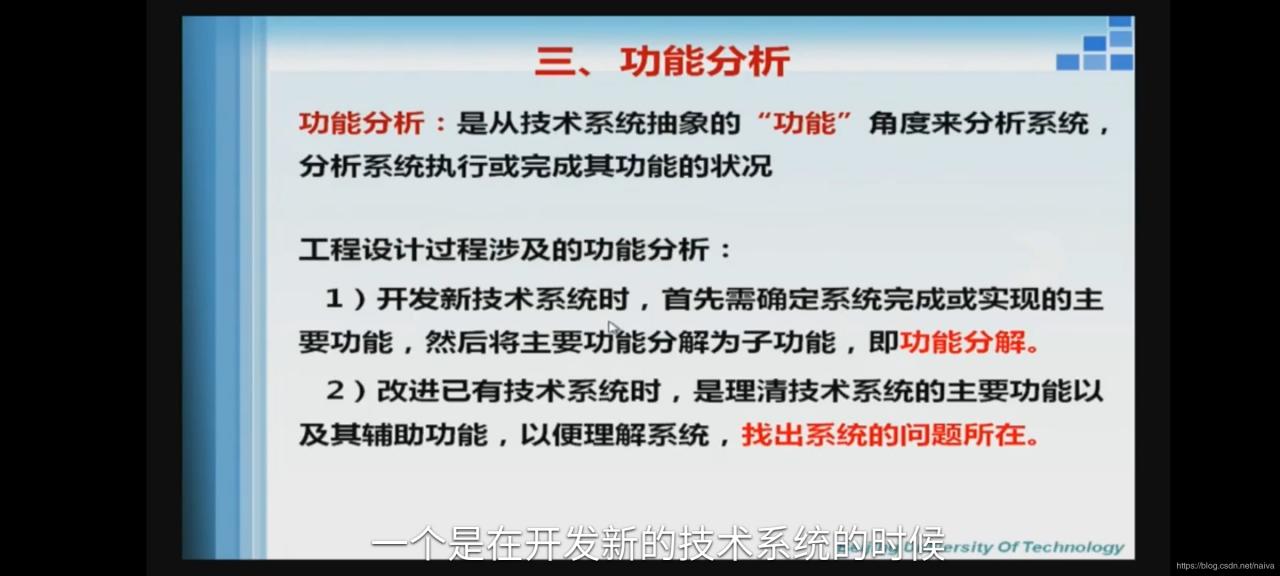

思考:如何找到系统中的不足?
过度功能有哪些?
不足功能有哪些?
有害功能有哪些?
功能模型图方便我们找到系统的关键问题点在哪儿,立足问题的归结点解决。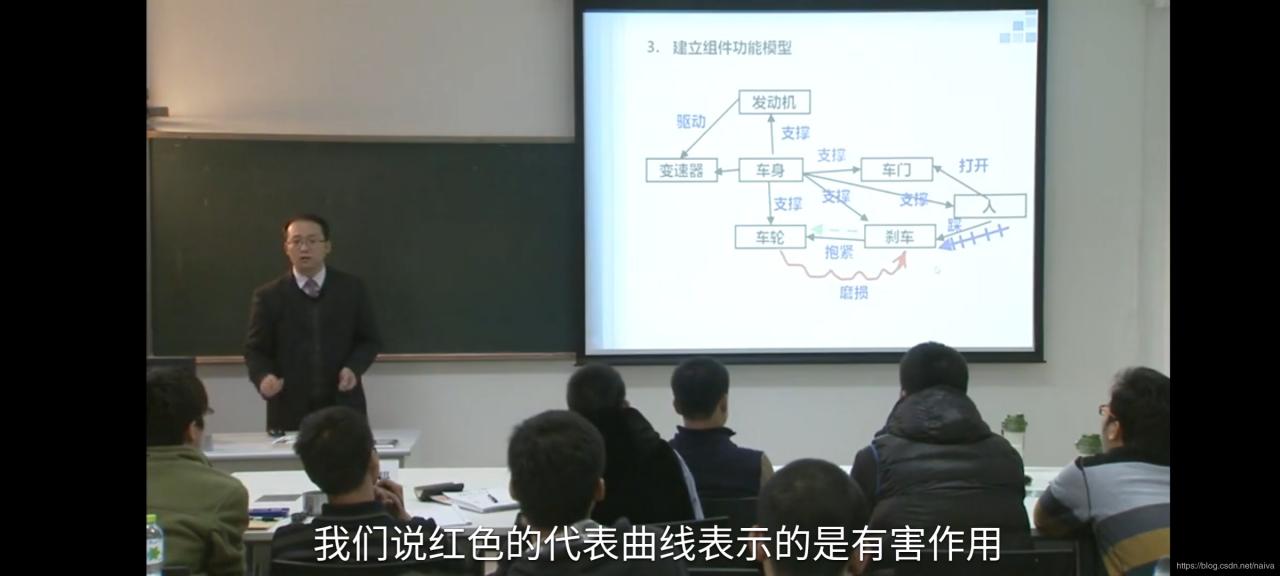
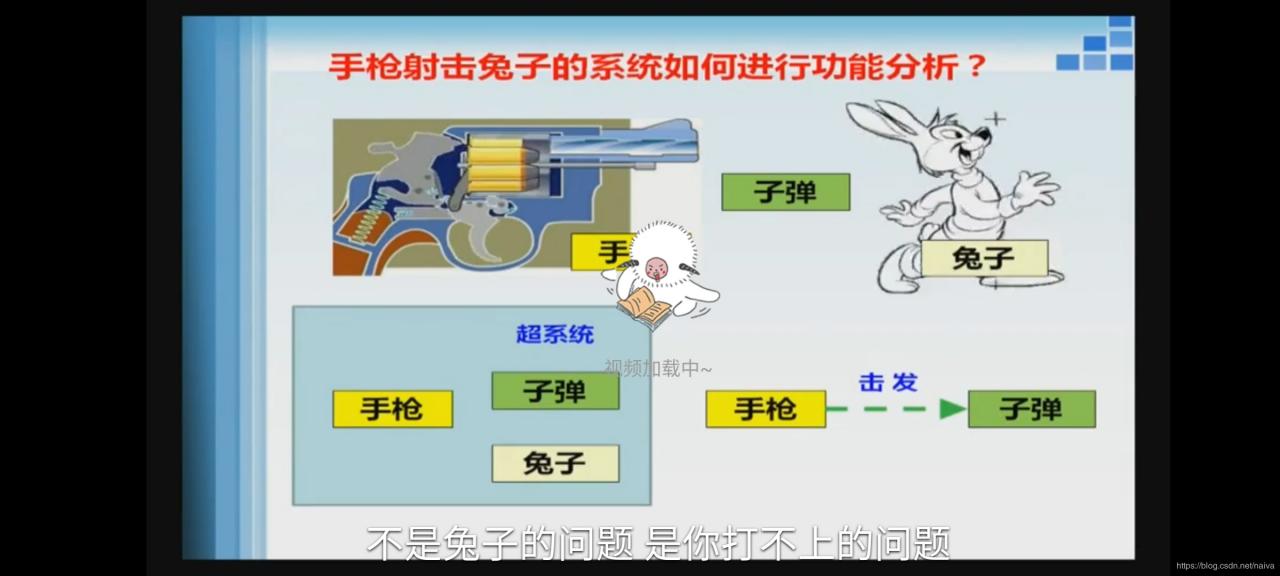
练习:手枪射击兔子
如何进行功能分析?
手枪、子弹、兔子

【技术矛盾】
目录
技术矛盾分析 39个参数(阿奇舒勒矛盾矩阵)和40个发明原理 技术矛盾解题案例 技术矛盾总结总结:
机械设计的基础知识是开展机械创新设计的基础 发明方法起“事半功倍”(启发)的作用 利用“技术矛盾”开展创新,关键是 ==找准问题的关键点 ==,就是矛盾的突出点。TRIZ解决问题三大步骤:
分析问题 (因果分析、剪裁) 系统分析 功能分析 解决问题(功能导向搜索) 技术矛盾 物理矛盾 方案实现(项目实际装配方案)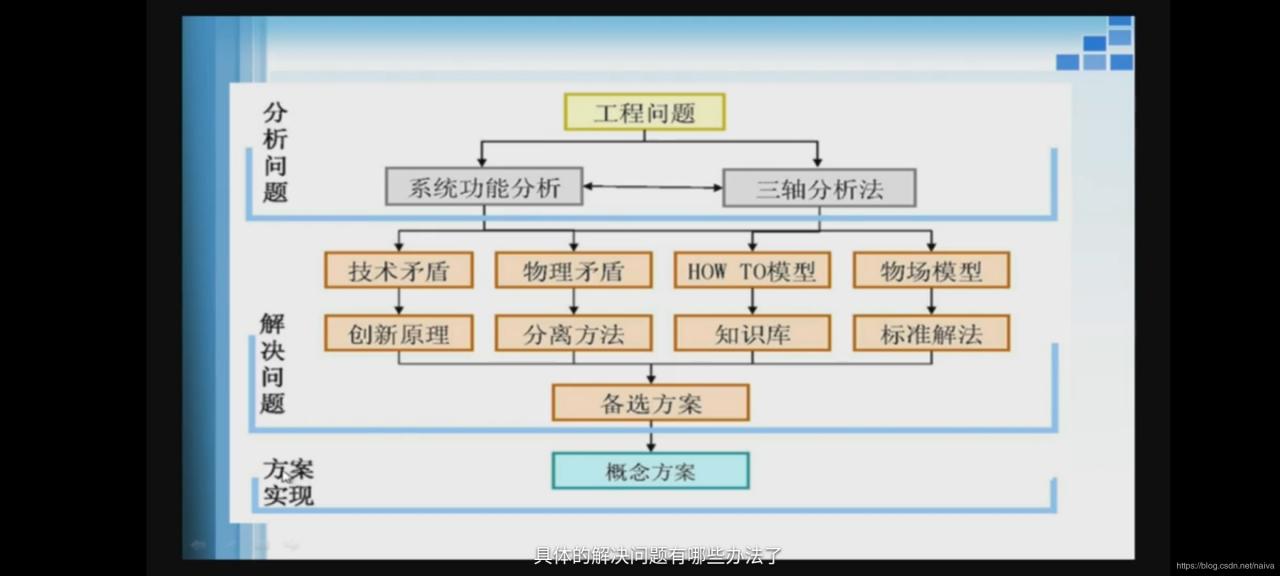
一、技术矛盾分析
定义:一个系统中两个子系统之间的矛盾
在一个子系统中引入一种有用功能,导致另外一个子系统产生有害功能(或加强了已存在的一种有害功能) 消除一种有害功能导致另外一个子系统有用功能降低 有用功能的加强或有害功能的减少导致另外一个子系统或系统变得复杂化。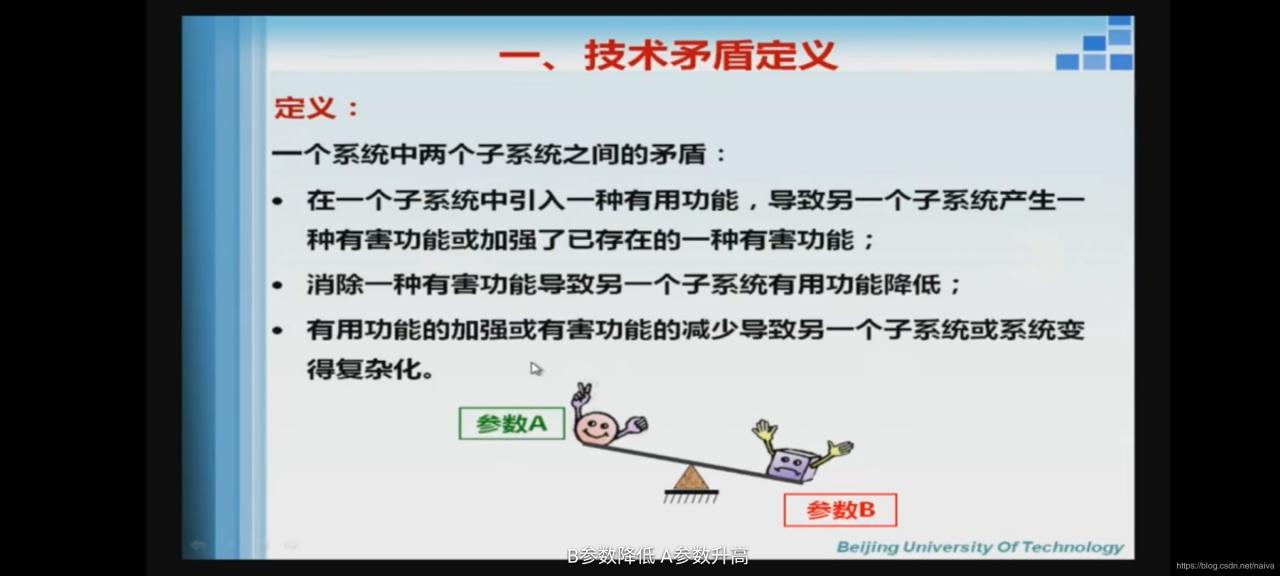
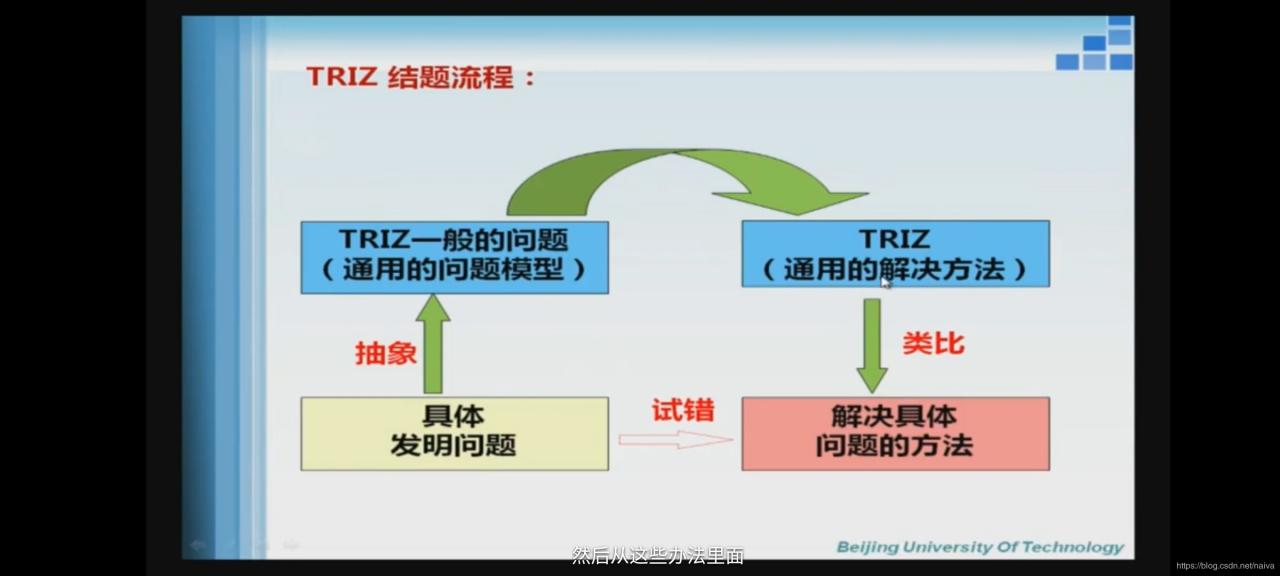
TRIZ解题流程:
技术矛盾解题流程:
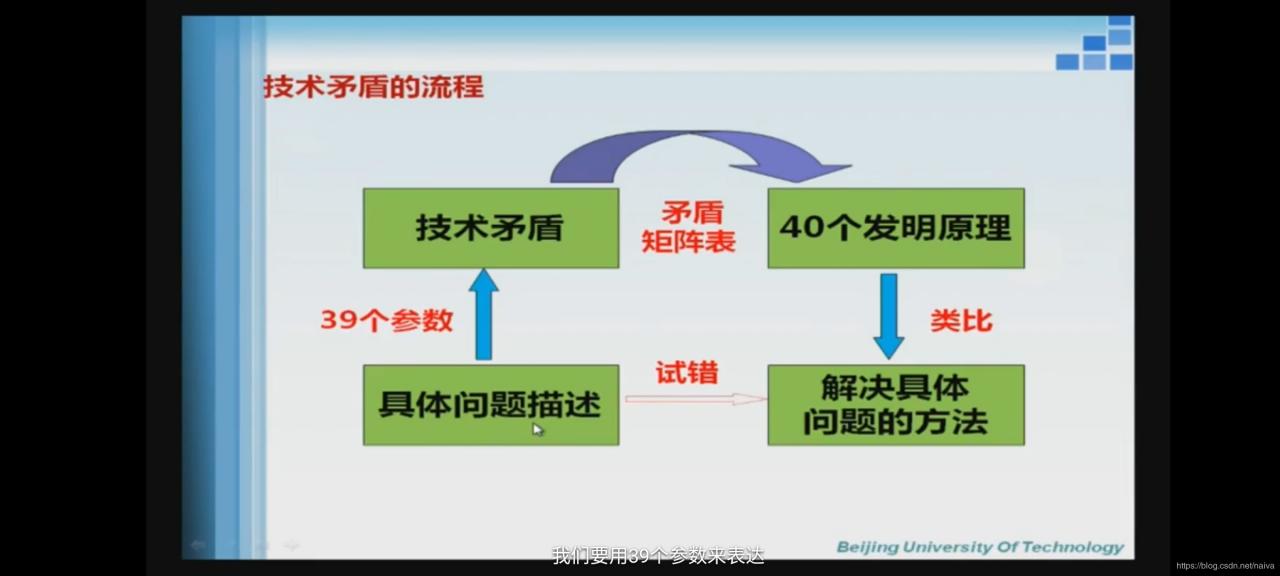
二、39个参数与40个发明原理
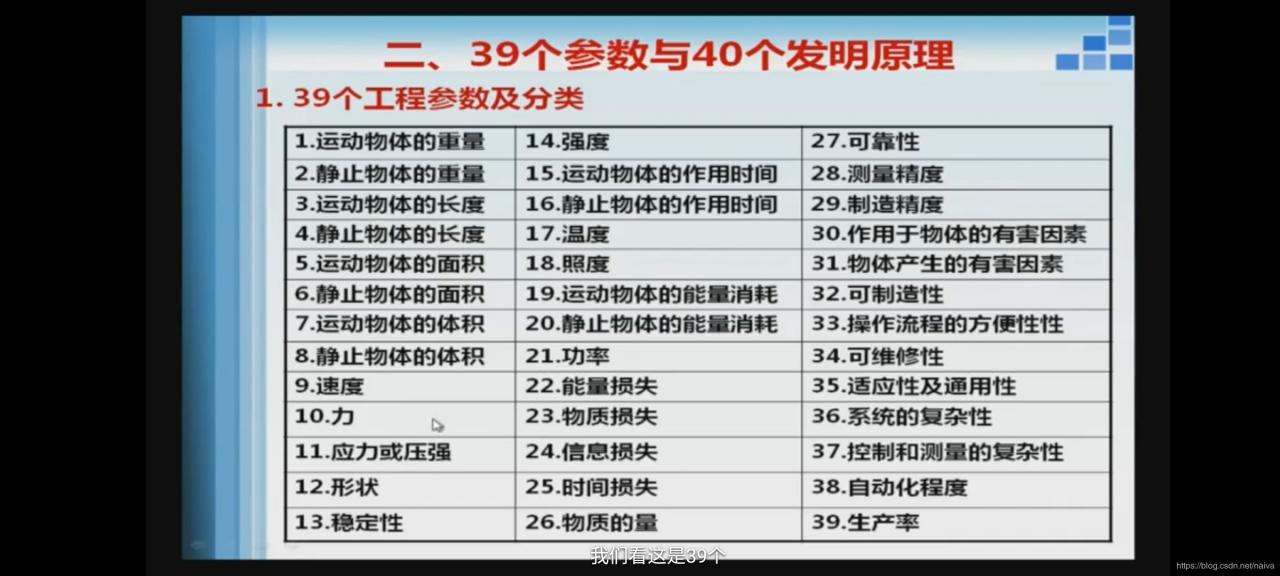
39个参数
什么是参数?(描述产品性能即为参数) 如何确定参数?难点
(参数很难确定,不好定性、定量。TRIZ通过结合250万个专利高度归纳与总结得到的工程参数与发明原理)
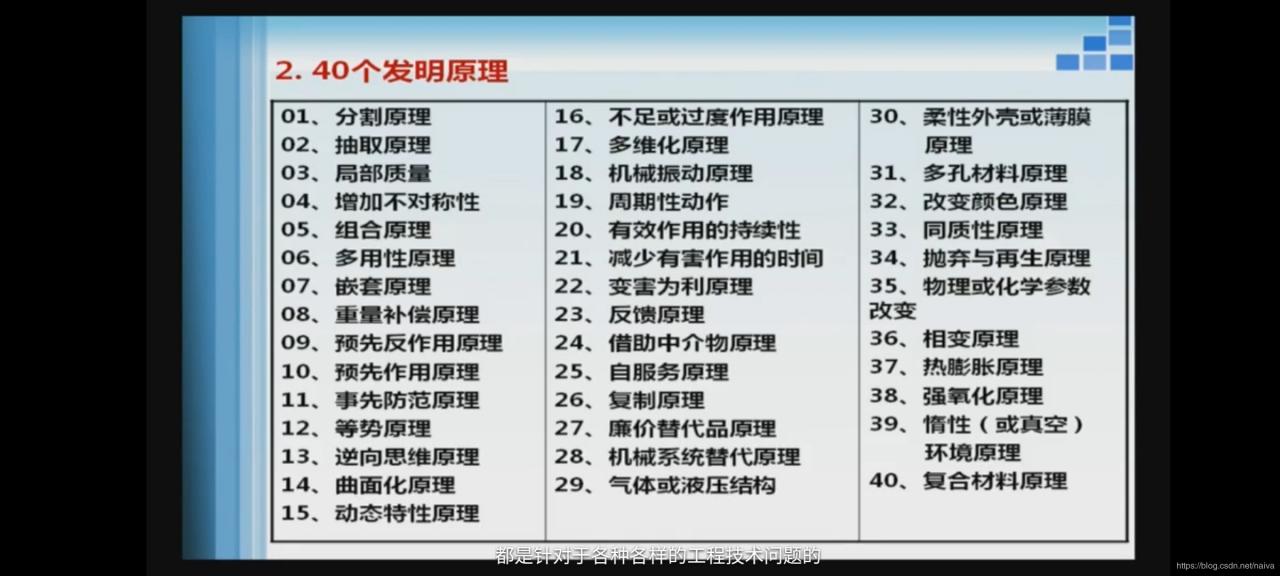
40个发明原理
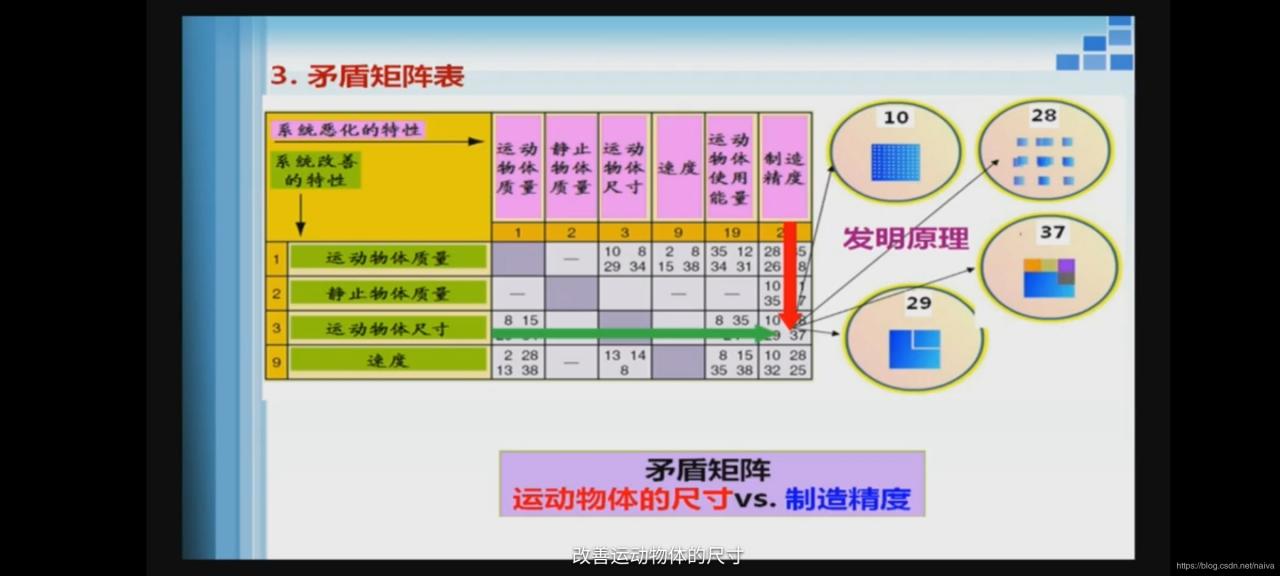
矛盾矩阵表
矛盾矩阵使用步骤:
实际问题 问题描述 工程参数 改善的工程参数 恶化的工程参数 矛盾矩阵 40发明原理 问题解决方案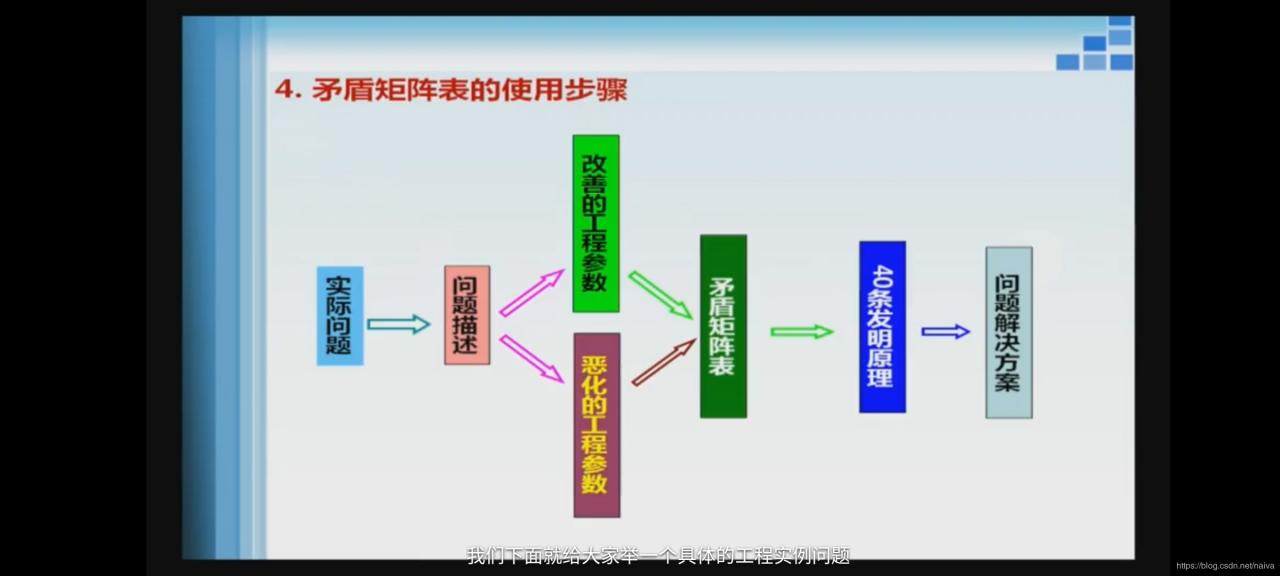
三、技术矛盾案例
案例:自动化温室穴苗移栽机
传统的农业播种主要是以撒种的形式,现代化温室农业育苗首先在盆里面一颗一颗地播种育苗。等种子生根发芽之后小的育盆已经不能容纳得了它了,所以需要移栽到更大的育盆中去。
问题分析 问题描述 参数对照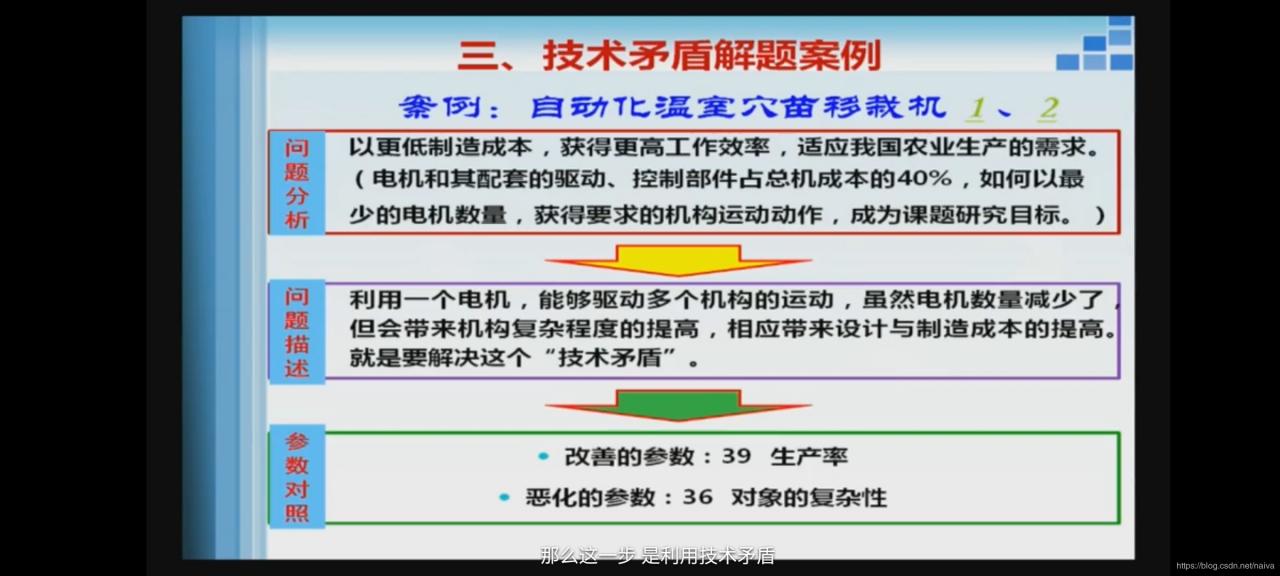
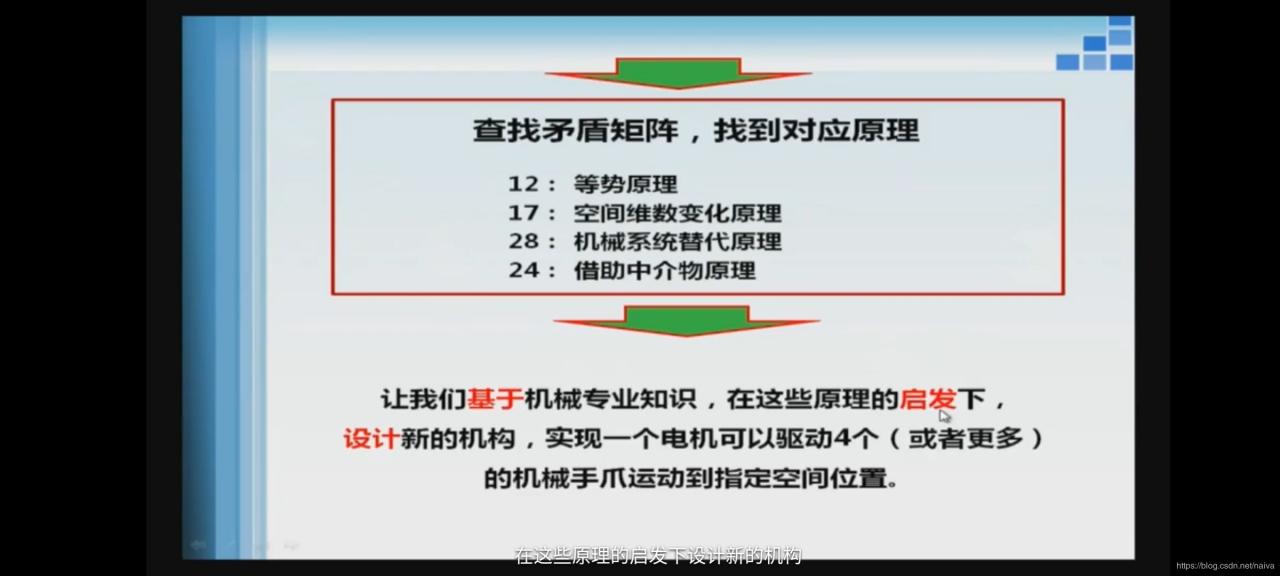
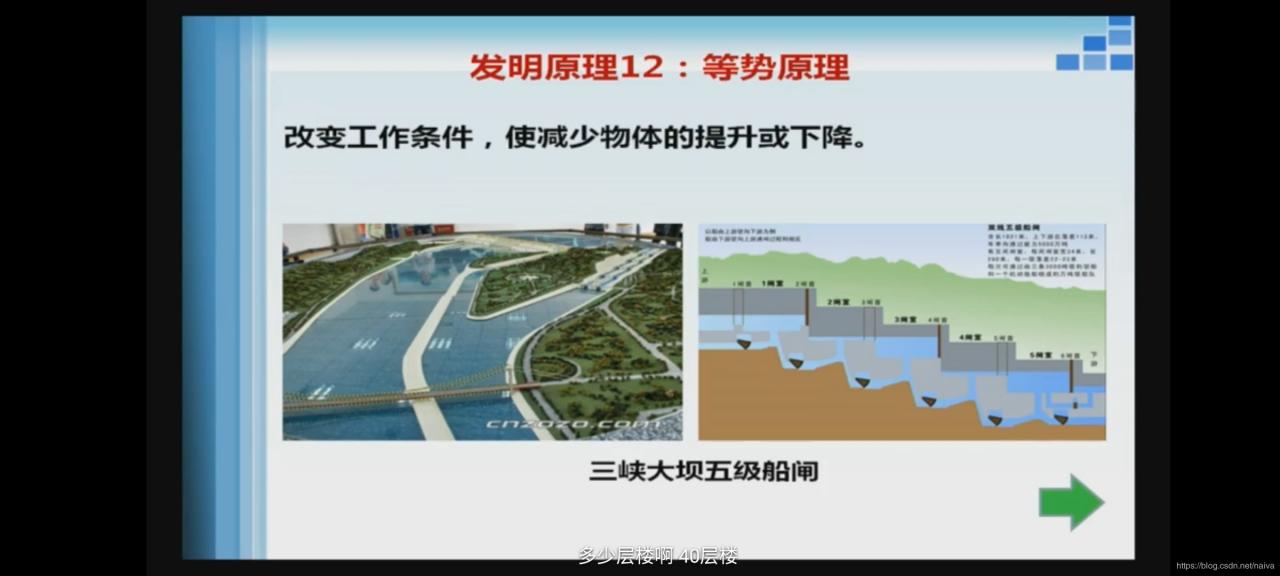
12-等势原理
例如:三峡大坝五级船闸
五级船闸就是由上游到下游间相连的五间用来装水的并船也可驶入其中的大房子,每二级间的落差都可在打开门(前后各有一道闸)后和上或下相邻的都可保持在同一水平上,当有船要上和下过坝时那就先由第一级开始,先打开第一级前闸(这闸不止可过水,并船也要驶入它中),当该闸中的水和自然水面平行时船就可驶入这闸中等待,这时关上前闸后再打开后闸,让第一闸的水位又和后第二级闸的水位相水平时就再驶入第二闸,.依此类推,这船就和上、下楼梯一样,对这五级般闸来说经过这同样的五次灌水或放水后水面的改变,船就可由不同水平坝水面上(下)至坝另一面的坝水面.这就完成了船只过坝的任务了。
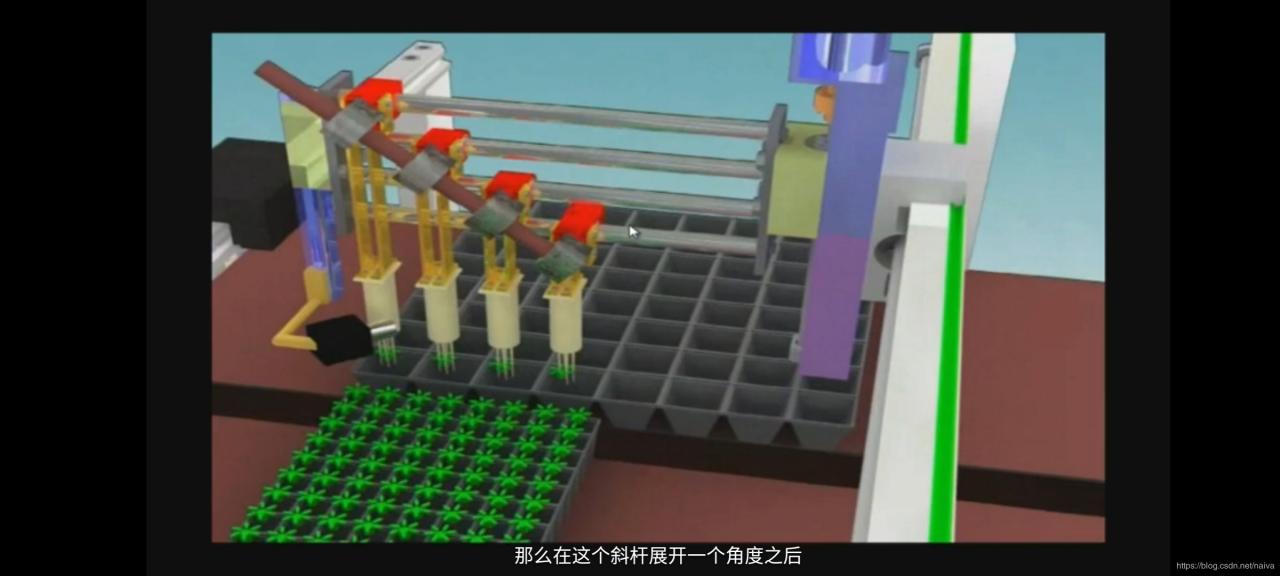
解决方案:利用一个电机带动四根平行杆上的滑块,滑块之间的驱动利用连杆驱动。
难点:容易卡壳,实际装配很难达到理论装配精度
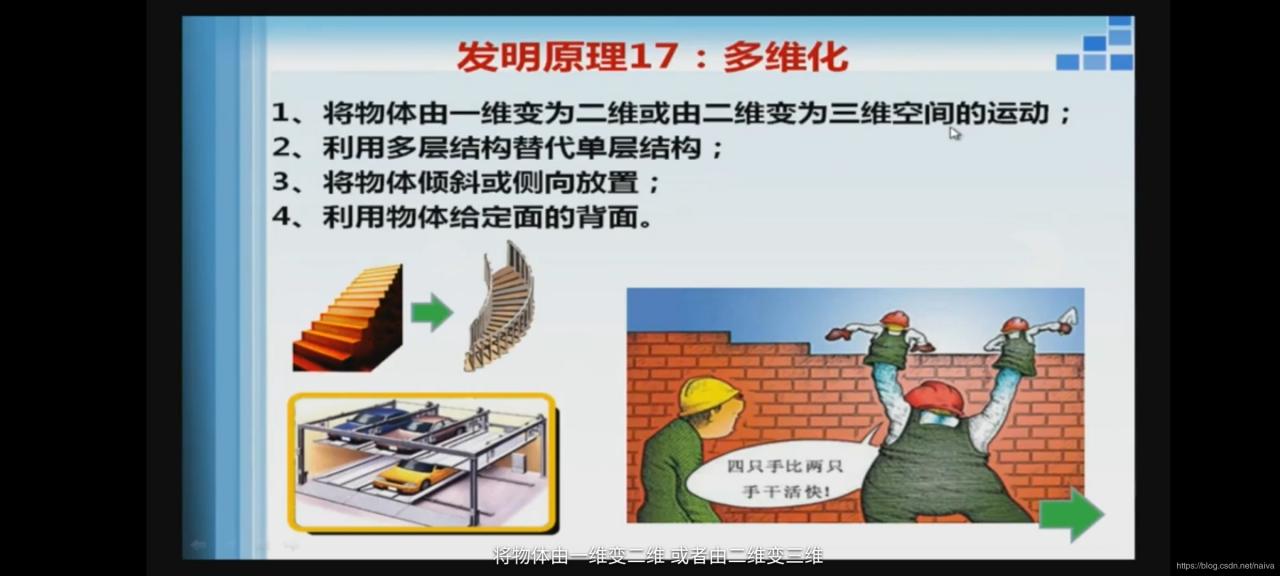
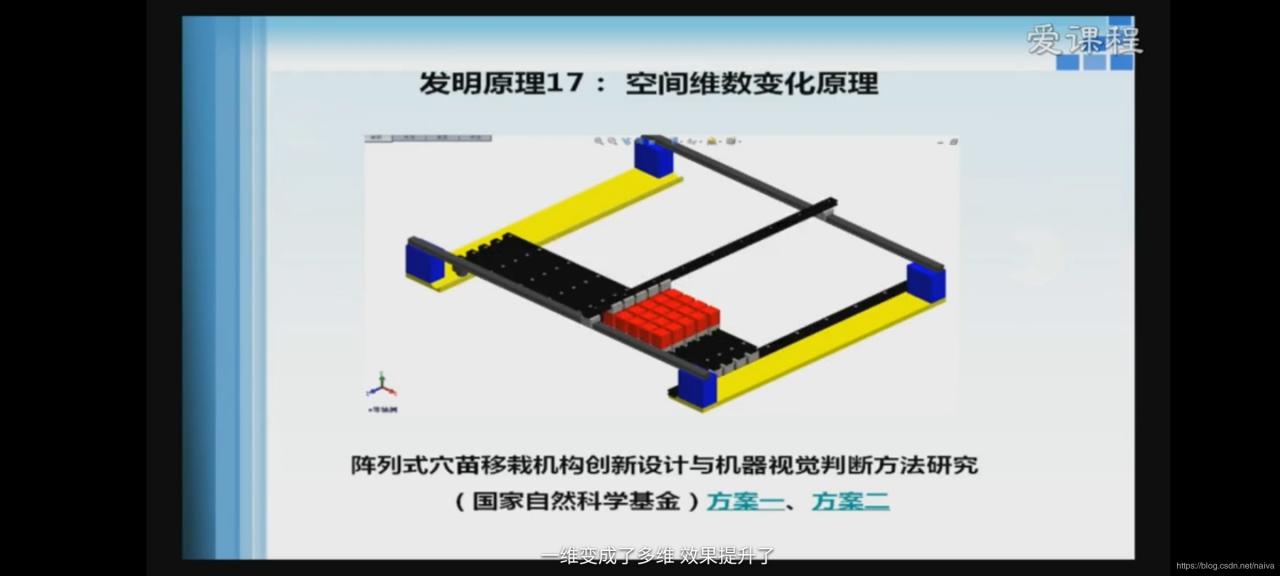
17-多维化
将物体由一维变为多维空间的运动 利用多层结构代替单层结构 将物体倾斜或倾倒放置 利用物体给定面的背面例如:传统的楼梯、停车场占空间
解决方案:
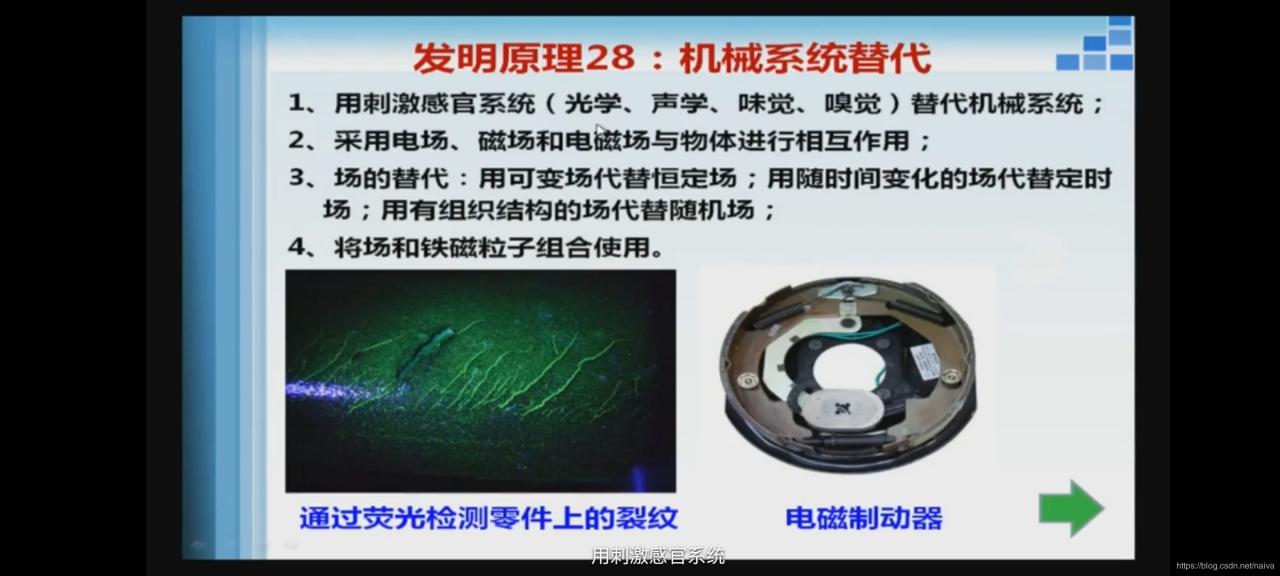
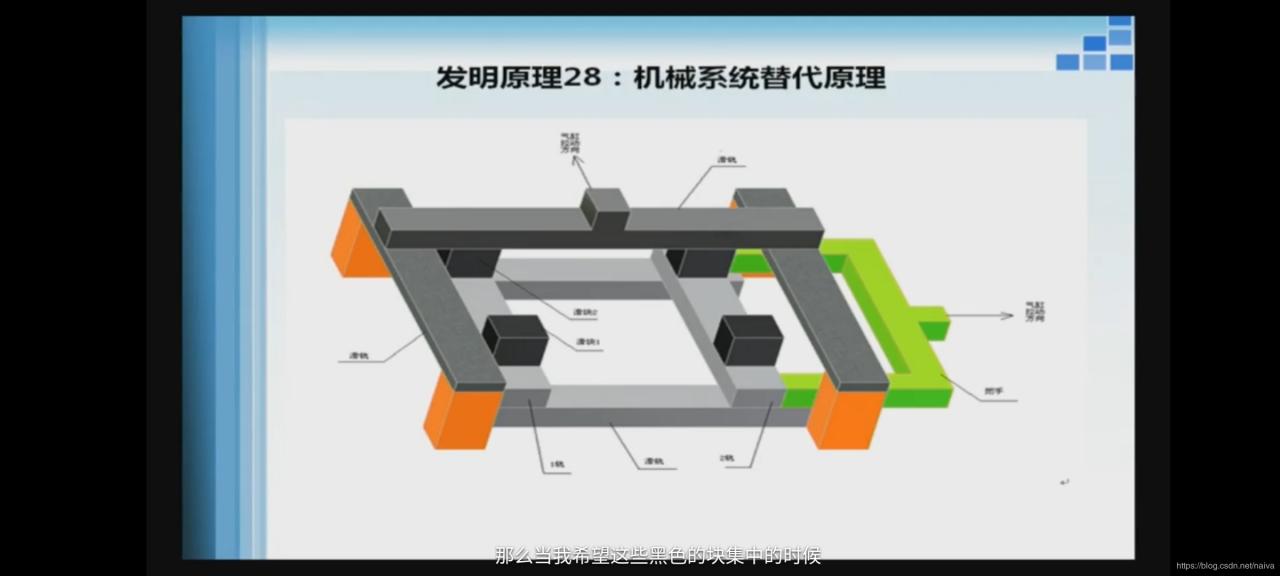
28-机械系统替代
例如:荧光粉检查零件上的裂痕;电磁刹车制动器代替传统刹车片,解决了传统刹车片摩擦发热的问题。(大卡车司机在长途运输过程中会经常用冷水给轮子降温)
解决方案:利用变换电流控制电磁铁相吸与相斥,从而控制机械爪。
难点:电流不易控制、系统复杂化
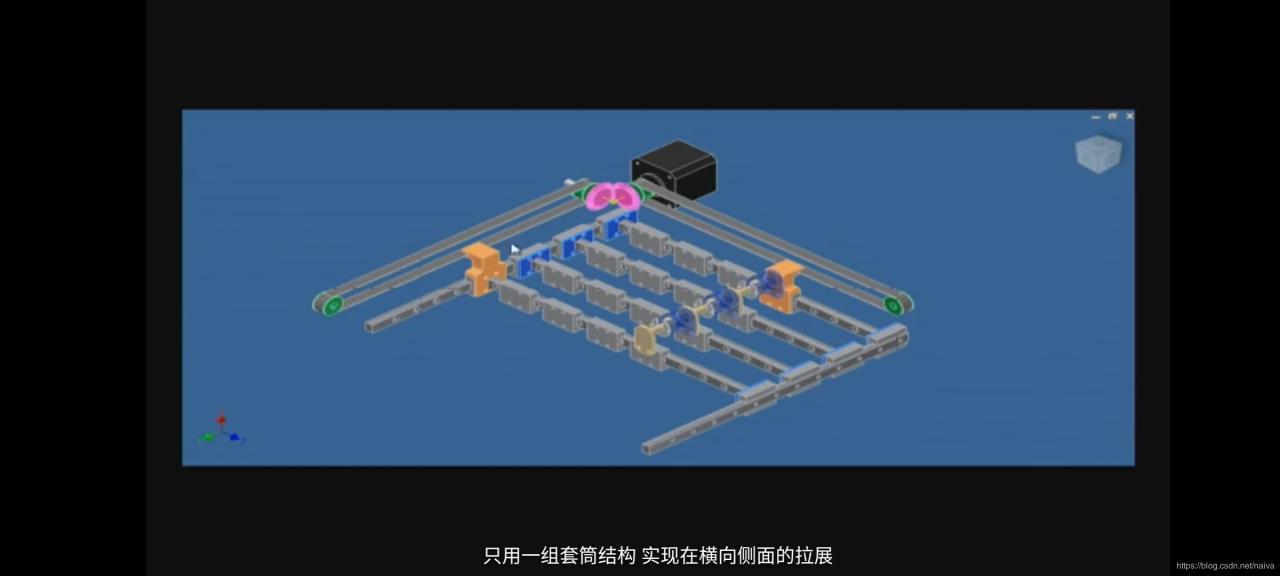
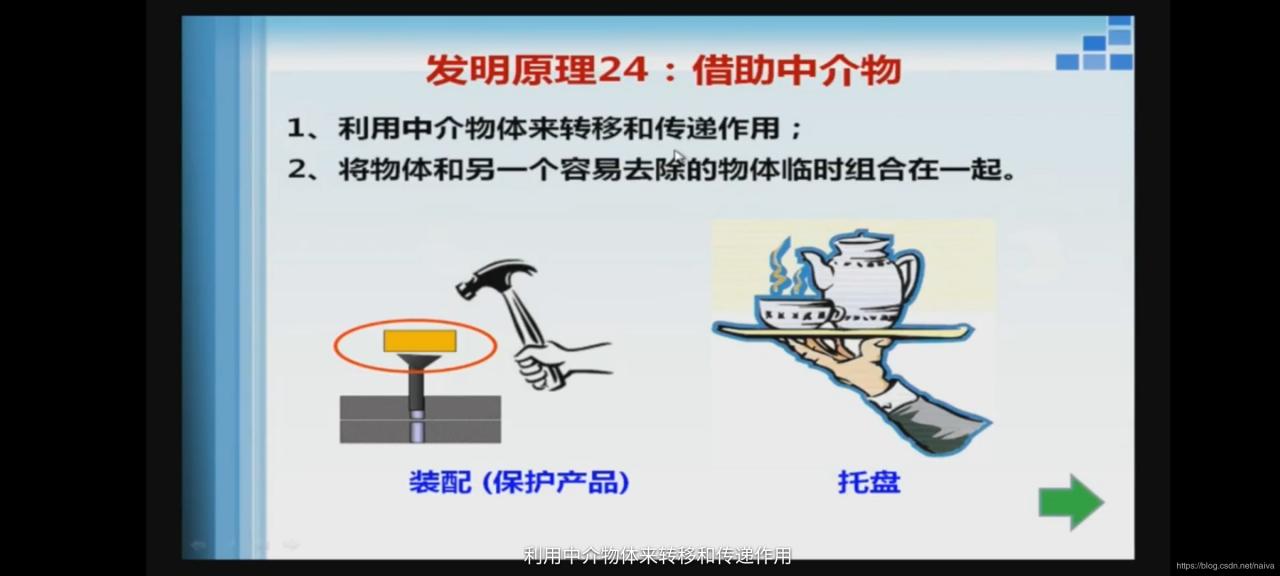
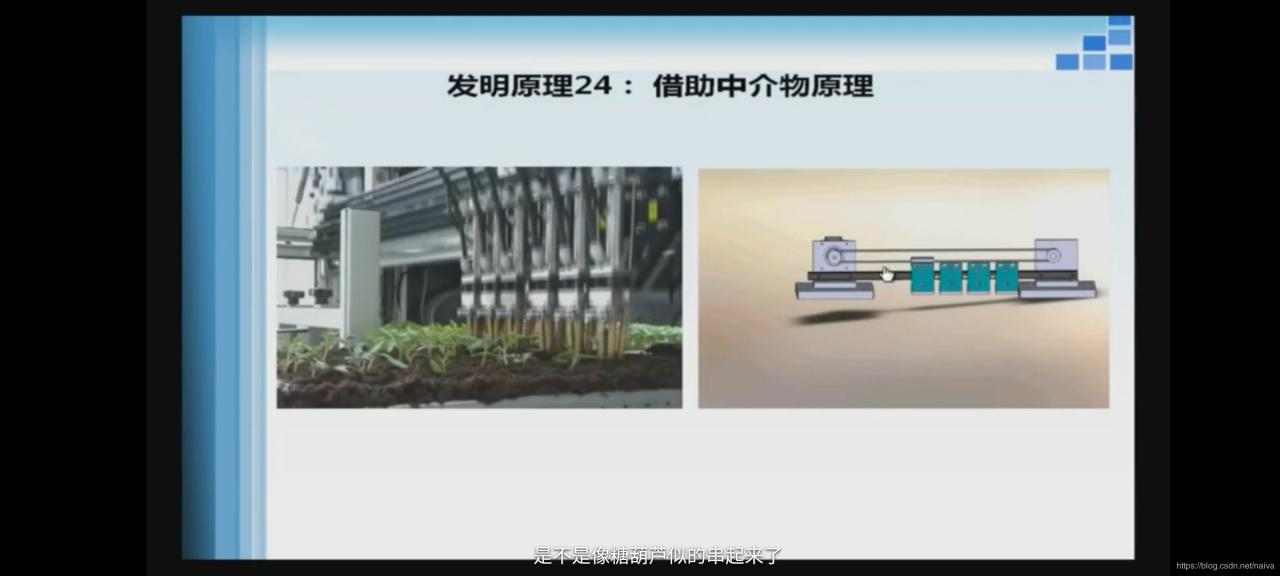
**24- 借助中介物 **
利用中介物来传递和转移 将物体和容易去除的物体临时组合在一起(容易去除、容易变化的物体)
解决方案:
在滑块与滑块之间通过软带传动,控制软带的长度即可控制滑块之间的距离。(不在乎过程是如何实现的,只计算最后的软带长度,控制机械爪最后放置育苗的间隔距离)
四、技术矛盾总结
机械工程创新 = 专业基础知识(生活经验?案例探讨?行否) +发明原理运用 找准问题关键点,即技术矛盾突出点作者:Naiva