【RoboMaster】细说单片机的中断系统!【STM32】
同步博客地址:从STM32开始的RoboMaster生活:进阶篇 II [Interrupt]
项目&教程仓库:-STM32-RoboMaster-
1.0 什么是Interrupt?中断是指计算机运行过程中,出现某些意外情况需主机干预时,机器能自动停止正在运行的程序并转入处理新情况的程序,处理完毕后又返回原被暂停的程序继续运行。
Interrupt在STM32中大致分为两种,一种就是普通的Interrupt,由外部的外设来打断MCU,另一种名为Exception,是由内部的软件程序自行打断MCU。 要大致理解Interrupt,我们需要了解一下整个运行周期 首先是,MCU接收到打断信号,但是还没有对该信号做出反应 然后,当MCU运行完当前的指令后,在fetch下一个指令前,停止当前程序,进入中断 保存被打断的程序的状态到系统栈,把发起中断的程序的预备状态载入到系统栈,进入该程序 执行发起中断的程序 完成后,再把被打断的程序的状态从系统栈加载回来,然后继续执行被打断的程序(全当做无事发生.JPG) 2.0 为什么需要Interrupt? 在将Interrupt前,必须提一下Polling。我打个比方,比如有个快递要今天送过来,但你现在正在做RoboMaster,而快递小哥也不知道你长啥样,如果在他来的时候没来人拿,那他就走了,包裹就没了(这个传来的数据是即时的,数据可不会等你)。 如果是Polling,那就是,你一直时不时盯着小区门口,看快递小哥来没来,结果可想而知,可能一整天都没做多少RoboMaster,甚至可能在做的时候,正好小哥来了又走了,结果快递也没拿到。 那有没有办法,可以既能够放心做RoboMaster,又不用担心错过快递呢?这就是Interrupt登场的时候了,方法也很简单,让快递小哥在快递送到的时候给你打个电话(中断信号),你放下手中的RoboMaster任务(被中断),去门口拿快递(执行中断程序),拿完后继续做RoboMaster(继续被中断的任务)就行了。 3.0 STM32内部实现线路 & NVIC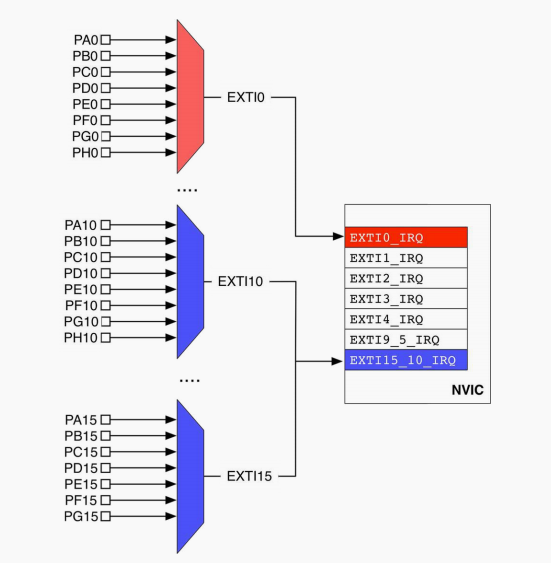
NVIC全称为Nested Vectored Interrupt Controller,是STM32专门划分独立出来的模块,专门负责Interrupt事宜,其中技术细节和使用细节非常冗杂,但是实际在RoboMaster中能使用到的部分却是比较简单的,所以本文也不展开细说。
从上图中我们可以看到,NVIC并不是和每个GPIO有单独的线路相连,而是将GPIO分组的,这里与GPIO自己的外设分组不同,并不是PA0,PA1,PA2…为一组,而是PA0,PB0,PC0…为一组,每组共用一根Interrupt信号线,而且更为复杂和迷惑的是,有些特殊情况,比如EXTI10和EXTI15居然在NVIC里面是合并的,但这不用担心,因为就算合并了,STM32也是能分辨具体是从那个组发出的(HAL_GPIO_EXTI_Callback函数能够区分是那个组)。你很可能也猜到了,NVIC是没法分辨每个组内部是那个引脚发出的Interrupt信号,所以在设置芯片的时候,每个组只能有一个引脚能够使用Interrupt。 4.0 Interrupt的生命周期要谈这个,避免不了要讲讲Priority 优先级
为使系统能及时响应并处理发生的所有中断,系统根据引起中断事件的重要性和紧迫程度,硬件将中断源分为若干个级别,称作中断优先级。
在实际系统中,常常遇到多个中断源同时请求中断的情况,这时MCU必须确定首先为哪一个中断源服务,以及服务的次序。解决的方法是中断优先排队,即根据中断源请求的轻重缓急,排好中断处理的优先次序即优先级( Priority ),又称优先权,先响应优先级最高的中断请求。另外,当MCU正在处理某一中断时,要能响应另一个优先级更高的中断请求,而屏蔽掉同级或较低级的中断请求,形成中断嵌套。
中断优先级原则
CPU首先响应高优先级的中断请求; 如果优先级相同,MCU按查询次序响应排在前面的中断; 正在进行的中断过程不能被新的同级或低优先级的中断请求所中断; 正在进行的低优先级中断过程,能被高优先级中断请求所中断。而在STM32中,又有两种不同的优先级
Preempt Priority 也就是我们最常说的常用的Priority,优先级小,越优先,比如优先级如果为负,那就是系统自己的系统中断,比任何用户代码的优先级都高,而用户能够设置的最高的优先级就是0级,其次是1级,2级… Subpriority 主要针对当Preempt Priority相同的情况。 比如,当某个0级程序正在运行时,有1个2级程序发出中断信号,但是因为2级程序的优先级比0级低,所以被Pending 延迟处理了,在0级程序还没运行完的时候,又有一个2级程序发出中断信号,因为同样的原因,也被Pending了,问题来了,当0级程序处理完后,请问先执行那个2级程序呢?当然是,子优先级小的那个。 5.0 如何使用Interrupt 首先是要在配置芯片的时候,给引脚选择EXTI模式void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
......
}
在写代码的时候,在main.c中创建HAL_GPIO_EXTI_Callback函数
在该函数中填写如果被中断,需要执行的代码
在/Drivers/STM32F4xx_HAL_Driver/Src的stm32f4xx_hal_gpio.c文件中,我们可以看到其定义
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
这里的__weak指明了,该函数如果没被用户创建,就使用上面的代码被默认创建,而如果用户在main.c中自主创建该函数,则用户创建的函数覆盖默认定义的函数。
HAL_GPIO_EXTI_Callback中的uint16_t GPIO_Pin是给用户说明了发出中断信号的是哪个组,正如3.0里面所说,就算EXTI10和EXTI15在NVIC里面是合并的,这个参数也能区分到底是EXTI10还是EXTI15发出的信号,所以不用担心合并后无法区分的问题。
6.0 练习项目
6.1 项目简介
与从STM32开始的RoboMaster生活:进阶篇 I [GPIO]里面的项目相同,但是用Interrupt来实现,链接地址
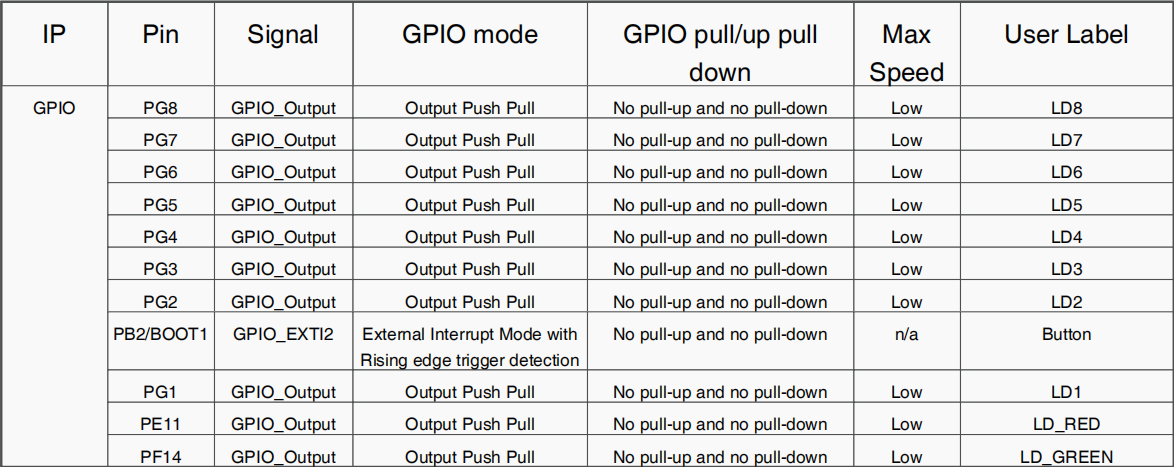
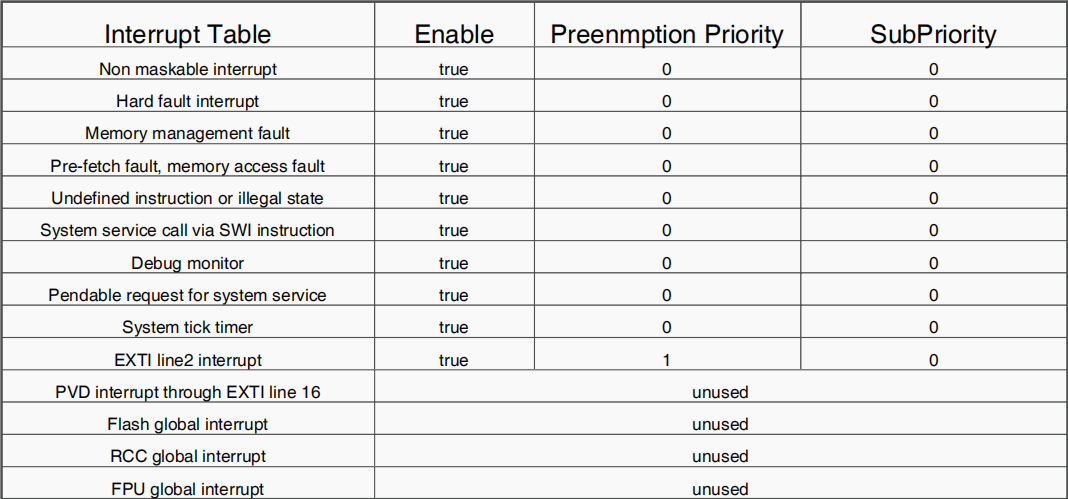
6.2 芯片配置
芯片视角

我只放了main.c,完整的工程文件可以在这里找到!
Src/main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2020 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOG_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOG, LD8_Pin|LD7_Pin|LD6_Pin|LD5_Pin
|LD4_Pin|LD3_Pin|LD2_Pin|LD1_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD_RED_GPIO_Port, LD_RED_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD_GREEN_GPIO_Port, LD_GREEN_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : LD8_Pin LD7_Pin LD6_Pin LD5_Pin
LD4_Pin LD3_Pin LD2_Pin LD1_Pin */
GPIO_InitStruct.Pin = LD8_Pin|LD7_Pin|LD6_Pin|LD5_Pin
|LD4_Pin|LD3_Pin|LD2_Pin|LD1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
/*Configure GPIO pin : Button_Pin */
GPIO_InitStruct.Pin = Button_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(Button_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD_RED_Pin */
GPIO_InitStruct.Pin = LD_RED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD_RED_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD_GREEN_Pin */
GPIO_InitStruct.Pin = LD_GREEN_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD_GREEN_GPIO_Port, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI2_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(EXTI2_IRQn);
}
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if(GPIO_Pin == Button_Pin){
HAL_Delay(500);
HAL_GPIO_TogglePin(LD_RED_GPIO_Port,LD_RED_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD_GREEN_GPIO_Port,LD_GREEN_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD1_GPIO_Port,LD1_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD2_GPIO_Port,LD2_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD3_GPIO_Port,LD3_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD4_GPIO_Port,LD4_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD5_GPIO_Port,LD5_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD6_GPIO_Port,LD6_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD7_GPIO_Port,LD7_Pin);
HAL_Delay(100);
HAL_GPIO_TogglePin(LD8_GPIO_Port,LD8_Pin);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
6.4 效果展示
效果与从STM32开始的RoboMaster生活:进阶篇 I [GPIO]里面展示的相同,链接地址
作者:Alchemic Ronin 炼金浪人