汽车二自由度模型公式推导及simulink模型——传递函数、状态空间
文章目录二自由度车辆方程传递函数法状态空间
二自由度车辆方程
为便于掌握操纵稳定性的基本特性,我们将一对简化为线性二自由度的汽车模型进行研究,分析中忽略一下几点:
1、忽略转向系统的影响,直接以前轮转角作为输入。
2、忽略悬架的作用,认为汽车车厢只作平行于地面的平面运动,即汽车沿z轴的位移,绕y轴的俯仰角与绕x轴的侧倾角均为零。
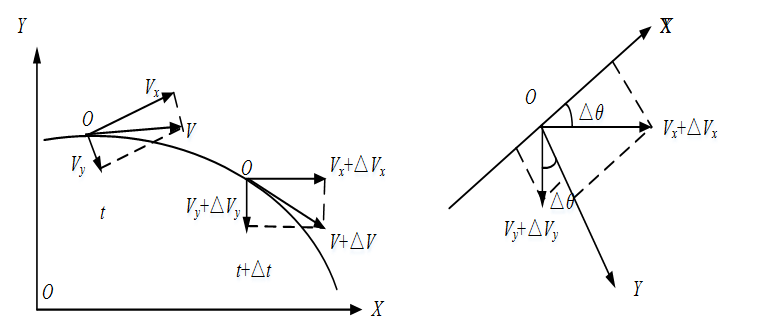
另外,汽车沿着x轴的前进速度u视为不变。因此,汽车只有沿y轴的侧向运动与绕z轴的横摆运动这样两个自由度。此外,汽车的侧向加速度限定在0.4g以下,轮胎侧偏特性处于线性范围。在建立运动微分方程时还假设:驱动力不大,不考虑地面切向力对轮胎侧偏特性的影响,没有空气动力的作用,忽略左、右车车轮轮胎由于载荷的变化而引起轮胎特性的变化以及轮胎回正力矩的作用。这样,实际汽车便简化成为一个两轮摩托车模型。
 原创文章 2获赞 0访问量 88
关注
私信
展开阅读全文
原创文章 2获赞 0访问量 88
关注
私信
展开阅读全文
作者:Jeffery_King
相关文章
Vicky
2021-07-27
Frieda
2020-05-07
Rebecca
2021-05-19
Cherise
2021-07-10
Beatrice
2021-05-21
Thirza
2023-07-20
Rhoda
2023-07-20
Tesia
2023-07-20
Ursula
2023-07-20
Carly
2023-07-20
Irma
2023-07-20
Posy
2023-07-20
Edana
2023-07-20
Dabria
2023-07-20
Paula
2023-07-20
Peony
2023-07-20
Rayna
2023-07-20
Fawn
2023-07-21
Tia
2023-07-21