Android OpenCV(二十二):边缘检测
什么是图像的边缘?
图像的边缘是图像最基本的特征之一。所谓边缘(或边沿)是指周围像素灰度有跳跃性变化或“屋顶”变化的那些像素的集合。边缘是图像局部强度变化最明显的地方,它主要存在于目标与目标、目标与背景、区域与区域之间,因此它是图像分割依赖的重要特征。从本质上说,图像边缘是图像局部特性不连续性(灰度突变、颜色突变、纹理结构突变等)的反应,它标志着一个区域的终结和另一个区域的开始。
检测出的边缘并不等同于实际目标的真实边缘。由于图像数据是二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。
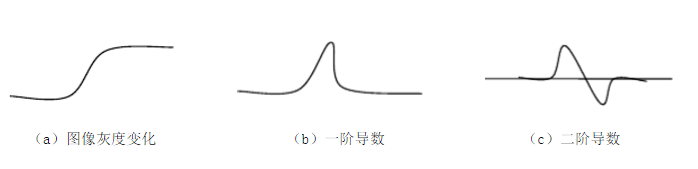
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘。一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。
由于图像是离散的信号,我们可以用临近的两个像素差值来表示像素灰度值函数的导数,如下:

这种X轴方向求导方式对应于滤波器为[1, -1],对于Y轴方向则是[1, -1]的转置矩阵。
但是这种求导方式的计算结果最接近于两个像素中间位置的梯度,而两个像素之间是不存在像素的,因此,我们应该选取像素点的前后像素的差值来进行计算,如下:
 此时,对应的X轴方向的滤波器为[0.5, 0, -0.5],对应的Y轴方向的滤波器则是其转置矩阵。根据这种方式,我们也可以得到计算45度方向的梯度对应的滤波器。
此时,对应的X轴方向的滤波器为[0.5, 0, -0.5],对应的Y轴方向的滤波器则是其转置矩阵。根据这种方式,我们也可以得到计算45度方向的梯度对应的滤波器。
0.50000000−0.5
\begin{matrix}
0.5 & 0 & 0 \\
0 & 0 & 0 \\
0 & 0 & -0.5
\end{matrix}
0.50000000−0.5
000.5000−0.500 \begin{matrix} 0 & 0 & 0.5 \\ 0 & 0 & 0 \\ -0.5 & 0 & 0 \end{matrix} 00−0.50000.500
API 图像卷积public static void filter2D(Mat src, Mat dst, int ddepth, Mat kernel, Point anchor, double delta, int borderType)
参数一:src,输入图像。
参数二:dst,输出图像,与输入图像具有相同的尺寸和通道数。
参数三:ddepth,输出图像的数据类型(深度),根据输入图像的数据类型不同拥有不同的取值范围。当赋值为-1时,输出图像的数据类型自动选择。
参数四:kernel,卷积核,CV_32FC1类型的矩阵。
参数五:anchor,内核的基准点(锚点),默认值(-1,-1)代表内核基准点位于kernel的中心位置。基准点即卷积核中与进行处理的像素点重合的点,其位置必须在卷积核的内部。
参数六:delta,偏值,在计算结果中加上偏值。
参数七:borderType,像素外推法选择标志。默认参数为BORDER_DEFAULT,表示不包含边界值倒序填充。
绝对值
图像的边缘有可能是由高像素值变为低像素值,也有可能是由低像素值变成高像素值,通过卷积计算得到的正数值表示需要像素值突然由低变高,得到的负数值表示像素值由高到低,这两种都是图像的边缘,因此为了在图像中同时表示出这两种边缘信息,需要将计算的结果求取绝对值。
public static void convertScaleAbs(Mat src, Mat dst, double alpha, double beta)
参数一:src,输入图像。
参数二:dst,计算绝对值后输入矩阵。
参数三:缩放因子,默认参数为只求取绝对值不进行缩放。
参数四:在原始数据上添加的偏值,默认参数表示不增加偏值。
该函数可以求取矩阵中所有数据的绝对值。函数前两个参数分别为输入、输出矩阵,两个参数可以是相同的变量。函数第三个和第四个参数为对绝对值的缩放和原始数据上的偏移。函数的计算原理如式:
dst(I)=saturate_cast(∣src(I)∗alpha+beta∣)
\texttt{dst} (I)= \texttt{saturate\_cast} (| \texttt{src} (I)* \texttt{alpha} + \texttt{beta} |)
dst(I)=saturate_cast(∣src(I)∗alpha+beta∣)
/**
* 边缘检测
* author: yidong
* 2020/5/2
*/
class EdgeDetectionActivity : AppCompatActivity() {
private lateinit var mBinding: ActivityEdgeDetectionBinding
private lateinit var mRgb: Mat
override fun onCreate(savedInstanceState: Bundle?) {
super.onCreate(savedInstanceState)
mBinding = DataBindingUtil.setContentView(this, R.layout.activity_edge_detection)
val bgr = Utils.loadResource(this, R.drawable.lena)
mRgb = Mat()
Imgproc.cvtColor(bgr, mRgb, Imgproc.COLOR_BGR2RGB)
showMat(mBinding.ivLena, mRgb)
}
private fun showMat(view: ImageView, source: Mat) {
val bitmap = Bitmap.createBitmap(source.width(), source.height(), Bitmap.Config.ARGB_8888)
bitmap.density = 360
Utils.matToBitmap(source, bitmap)
view.setImageBitmap(bitmap)
}
override fun onCreateOptionsMenu(menu: Menu?): Boolean {
menuInflater.inflate(R.menu.menu_edge_detection, menu)
return true
}
override fun onOptionsItemSelected(item: MenuItem): Boolean {
when (item.itemId) {
R.id.edge_detection_x -> {
edgeDetectionX()
}
R.id.edge_detection_y -> {
edgeDetectionY()
}
R.id.edge_detection_x_y -> {
edgeDetectionXAndY()
}
R.id.edge_detection_xy -> {
edgeDetectionXY()
}
R.id.edge_detection_yx -> {
edgeDetectionYX()
}
}
return true
}
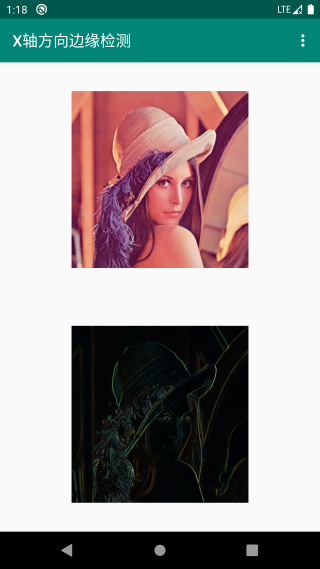
private fun edgeDetectionX() {
title = "X轴方向边缘检测"
// X轴方向边缘检测
val kernelX = Mat(1, 3, CvType.CV_16S)
val arrayX = shortArrayOf(-1, 0, 1)
kernelX.put(0, 0, arrayX)
val resultKernelX = Mat()
Imgproc.filter2D(mRgb, resultKernelX, CvType.CV_16S, kernelX)
Core.convertScaleAbs(resultKernelX, resultKernelX)
showMat(mBinding.ivResult, resultKernelX)
kernelX.release()
resultKernelX.release()
}
private fun edgeDetectionY() {
title = "Y轴方向边缘检测"
// Y轴方向边缘检测
val kernelY = Mat(3, 1, CvType.CV_16S)
val arrayY = shortArrayOf(-1, 0, 1)
kernelY.put(0, 0, arrayY)
val resultKernelY = Mat()
Imgproc.filter2D(mRgb, resultKernelY, CvType.CV_16S, kernelY)
Core.convertScaleAbs(resultKernelY, resultKernelY)
showMat(mBinding.ivResult, resultKernelY)
kernelY.release()
resultKernelY.release()
}
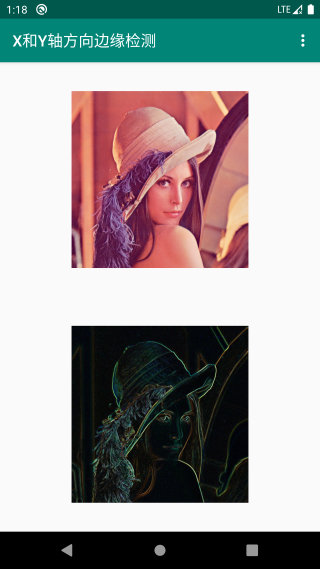
private fun edgeDetectionXAndY() {
title = "X和Y轴方向边缘检测"
// X轴方向边缘检测
val kernelX = Mat(1, 3, CvType.CV_16S)
val arrayX = shortArrayOf(-1, 0, 1)
kernelX.put(0, 0, arrayX)
val resultKernelX = Mat()
Imgproc.filter2D(mRgb, resultKernelX, CvType.CV_16S, kernelX)
Core.convertScaleAbs(resultKernelX, resultKernelX)
// Y轴方向边缘检测
val kernelY = Mat(3, 1, CvType.CV_16S)
val arrayY = shortArrayOf(-1, 0, 1)
kernelY.put(0, 0, arrayY)
val resultKernelY = Mat()
Imgproc.filter2D(mRgb, resultKernelY, CvType.CV_16S, kernelY)
Core.convertScaleAbs(resultKernelY, resultKernelY)
// X,Y轴方向合并
val resultXY = Mat()
Core.add(resultKernelX, resultKernelY, resultXY)
showMat(mBinding.ivResult, resultXY)
kernelX.release()
resultKernelX.release()
kernelY.release()
resultKernelY.release()
resultXY.release()
}
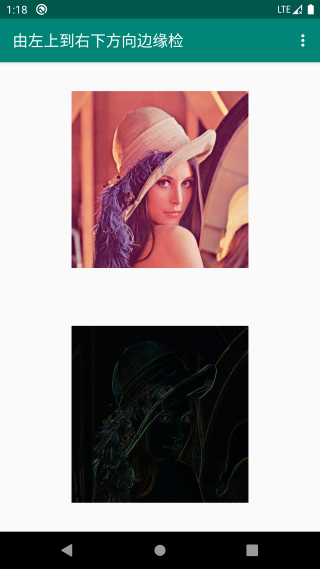
private fun edgeDetectionXY() {
title = "由左上到右下方向边缘检测"
//由左上到右下方向边缘检测
val kernelXY = Mat(2, 2, CvType.CV_16S)
val arrayXY = shortArrayOf(1, 0, 0, -1)
kernelXY.put(0, 0, arrayXY)
val resultKernelXY = Mat()
Imgproc.filter2D(mRgb, resultKernelXY, CvType.CV_16S, kernelXY)
Core.convertScaleAbs(resultKernelXY, resultKernelXY)
showMat(mBinding.ivResult, resultKernelXY)
kernelXY.release()
resultKernelXY.release()
}
private fun edgeDetectionYX() {
title = "由右上到左下方向边缘检测"
//由右上到左下方向边缘检测
val kernelYX = Mat(2, 2, CvType.CV_16S)
val arrayYX = shortArrayOf(0, -1, 1, 0)
kernelYX.put(0, 0, arrayYX)
val resultKernelYX = Mat()
Imgproc.filter2D(mRgb, resultKernelYX, CvType.CV_16S, kernelYX)
Core.convertScaleAbs(resultKernelYX, resultKernelYX)
showMat(mBinding.ivResult, resultKernelYX)
kernelYX.release()
resultKernelYX.release()
}
}
效果


https://github.com/onlyloveyd/LearningAndroidOpenCV
扫码关注,持续更新回复【计算机视觉】获取计算机视觉相关必备学习资料
回复【Android】获取Android,Kotlin必备学习资料

 onlyloveyd
onlyloveyd

作者:onlyloveyd