Python实现Opencv cv2.Canny()边缘检测
1. 效果图
2. 源码
补充:OpenCV-Python 中 Canny() 参数
这篇博客将介绍Canny边缘检测的概念,并利用cv2.Canny()实现边缘检测;
Canny边缘检测是一种流行的边缘检测算法。它是由约翰F开发的,是一个多阶段的算法;
Canny边缘检测大致包含4个步骤: 降噪(使用高斯滤波去除高频噪声);
计算边缘梯度和方向(SobelX、SobleY核在水平方向和垂直方向对平滑后的图像进行滤波,找到每个像素的边缘梯度和方向);
非最大抑制(在得到梯度大小和方向后,对图像进行全扫描,去除任何不需要的像素,这些像素可能不构成边缘。检查像素是否在其梯度方向的邻域中是局部最大值。否则,将被抑制(归零)。简而言之,得到的结果是一个具有“细边”的二值图像。
滞后阈值(决定哪些边是真正的边,哪些不是。为此需要两个阈值minVal和maxVal,任何强度梯度大于maxVal的边都肯定是边,小于minVal的边肯定是非边,因此丢弃。位于这两个阈值之间的边根据其连通性被分类为边或非边。如果它们连接到“确定边缘”像素,则它们被视为边缘的一部分。否则,它们也会被丢弃。)
选择滞后阈值minVal和maxVal是得到正确结果的关键。
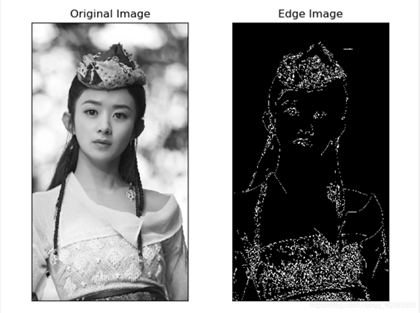
1. 效果图原始图 VS Canny检测效果图如下:
# Canny边缘检测是一种流行的边缘检测算法。它是由约翰F开发的,是一个多阶段的算法;
# Canny边缘检测大致包含4个步骤:
#
# 1.降噪(使用高斯滤波去除高频噪声);
# 2. 计算边缘梯度和方向(SobelX、SobleY核在水平方向和垂直方向对平滑后的图像进行滤波,找到每个像素的边缘梯度和方向);
# 3. 非最大抑制(在得到梯度大小和方向后,对图像进行全扫描,去除任何不需要的像素,这些像素可能不构成边缘。检查像素是否在其梯度方向的邻域中是局部最大值。否则,将被抑制(归零)。简而言之,得到的结果是一个具有“细边”的二值图像。
# 4. 滞后阈值(决定哪些边是真正的边,哪些不是。为此需要两个阈值minVal和maxVal,任何强度梯度大于maxVal的边都肯定是边,小于minVal的边肯定是非边,因此丢弃。位于这两个阈值之间的边根据其连通性被分类为边或非边。如果它们连接到“确定边缘”像素,则它们被视为边缘的一部分。否则,它们也会被丢弃。)
#
# 选择滞后阈值minVal和maxVal是得到正确结果的关键。
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('zly.jpg', 0)
edges = cv2.Canny(img, 80, 200)
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(edges, cmap='gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
plt.show()
参考 https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_canny/py_canny.html#canny
补充:OpenCV-Python 中 Canny() 参数步骤:
彩色图像转换为灰度图像(以灰度图或者单通道图读入)
对图像进行高斯模糊(去噪)
计算图像梯度,根据梯度计算图像边缘幅值与角度
沿梯度方向进行非极大值抑制(边缘细化)
双阈值边缘连接处理
二值化图像输出结果
"""
cv2.Canny(image, # 输入原图(必须为单通道图)
threshold1,
threshold2, # 较大的阈值2用于检测图像中明显的边缘
[, edges[,
apertureSize[, # apertureSize:Sobel算子的大小
L2gradient ]]]) # 参数(布尔值):
true: 使用更精确的L2范数进行计算(即两个方向的倒数的平方和再开放),
false:使用L1范数(直接将两个方向导数的绝对值相加)。
"""
import cv2
import numpy as np
original_img = cv2.imread("qingwen.png", 0)
# canny(): 边缘检测
img1 = cv2.GaussianBlur(original_img,(3,3),0)
canny = cv2.Canny(img1, 50, 150)
# 形态学:边缘检测
_,Thr_img = cv2.threshold(original_img,210,255,cv2.THRESH_BINARY)#设定红色通道阈值210(阈值影响梯度运算效果)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(5,5)) #定义矩形结构元素
gradient = cv2.morphologyEx(Thr_img, cv2.MORPH_GRADIENT, kernel) #梯度
cv2.imshow("original_img", original_img)
cv2.imshow("gradient", gradient)
cv2.imshow('Canny', canny)
cv2.waitKey(0)
cv2.destroyAllWindows()

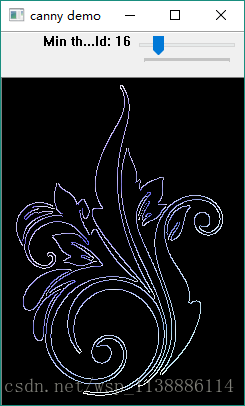
可调整阈值大小的程序
import cv2
import numpy as np
def CannyThreshold(lowThreshold):
detected_edges = cv2.GaussianBlur(gray,(3,3),0)
detected_edges = cv2.Canny(detected_edges,
lowThreshold,
lowThreshold*ratio,
apertureSize = kernel_size)
dst = cv2.bitwise_and(img,img,mask = detected_edges) # just add some colours to edges from original image.
cv2.imshow('canny demo',dst)
lowThreshold = 0
max_lowThreshold = 100
ratio = 3
kernel_size = 3
img = cv2.imread('qingwen.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.namedWindow('canny demo')
cv2.createTrackbar('Min threshold','canny demo',lowThreshold, max_lowThreshold, CannyThreshold)
CannyThreshold(0) # initialization
if cv2.waitKey(0) == 27:
cv2.destroyAllWindows()
到此这篇关于Python实现Opencv cv2.Canny()边缘检测的文章就介绍到这了,更多相关Opencv cv2.Canny()边缘检测内容请搜索软件开发网以前的文章或继续浏览下面的相关文章希望大家以后多多支持软件开发网!