01 ROS的安装和小海龟例程运行
任务
作者:Atrist
1.安装ROS,推荐ROS kinetic/indigo版本
2.运行小海龟例程,通过键盘控制小海龟运动
3.通过小海龟仿真器熟悉ros命令
首先ubuntu不同的版本对应ROS不同的版本,我们需要在安装过程中找到对应的版本进行在终端里的安装操作;
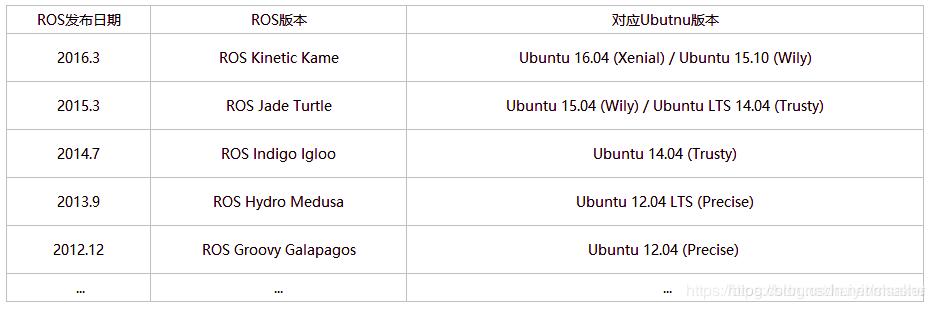
ubuntu的版本为18.04, 选择ros版本Melodic Morenia
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Note
使用如上的软件源安装ros,及其缓慢,需进行换源
使用USTC源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
添加秘钥
wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add -
或者使用
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
安装sudo apt-get update
# 推荐安装桌面完整版的
sudo apt install ros-melodic-desktop-full
4.安装完成,初始化ros
sudo rosdep init
rosdep update
设置ros的环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
note
如果你使用的不是自带的bash终端,而是zsh,需要使用如下命令
echo "source /opt/ros/melodic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
安装运行ros的附加软件包
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
例程 小海龟
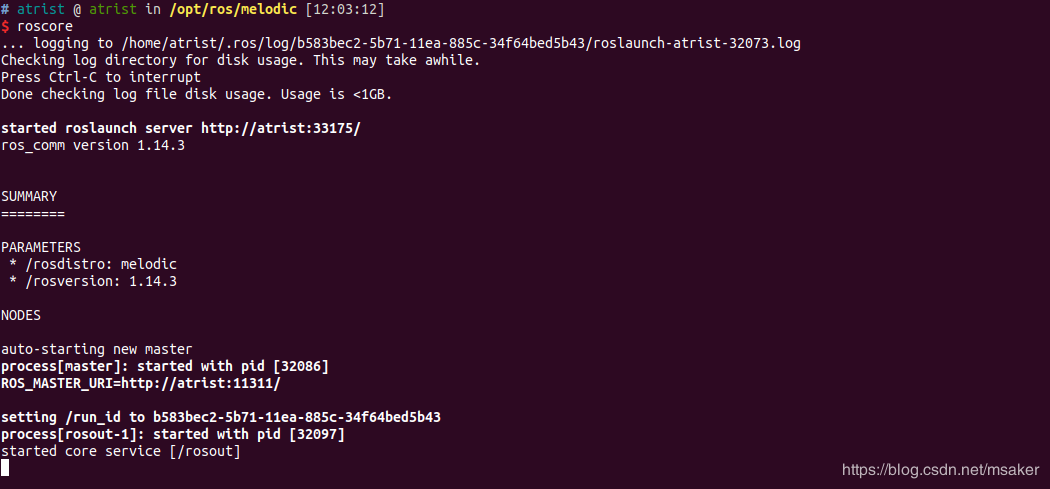
启动ros
roscore
ctrl+c退出ROS Master
ros+tab显示所有ros命令
ros命令 – help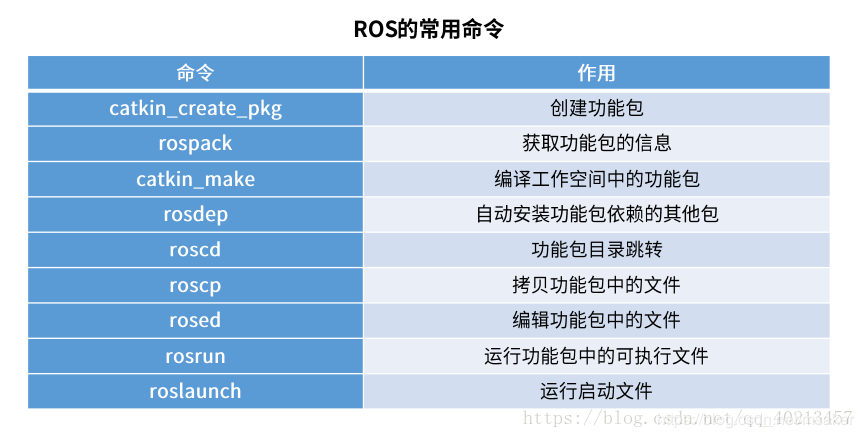
# 启动小海龟
rosrun turtlesim turtlesim_node
3. 再新建一个的终端
rosrun turtlesim turtlesim_teleop_key
最终效果
作者:Atrist
相关文章
Irisa
2020-12-24
Elizabeth
2020-01-29
Winona
2021-06-16
Tina
2023-07-20
Lassie
2023-07-20
Jacinda
2023-07-20
Thalia
2023-07-20
Winona
2023-07-20
Kamiisa
2023-07-20
Willow
2023-07-21
Damara
2023-07-21
Erin
2023-07-21
Dabria
2023-07-21
Karli
2023-07-22
Endora
2023-07-22
Linnea
2023-07-22
Bena
2023-07-22
Kohana
2023-07-22