手把手教学51单片机 | 流水灯 蜂鸣器 继电器
crol循环左移函数
作者:Benni-King
1.定义:a=下横杆crol下横杠 (变量x,一次左移位数n)
2.最高位左移变至最低位,次高位变最高位,以此类推。
3.执行顺序:变量先左移 再赋值给a
4.头文件include
参照循环左移函数,只是方向不同
续流二极管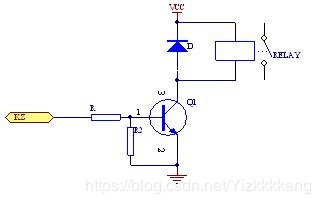
反向接入二极管,短路感应电动势,从而保护三极管
#include
#include//crol函数头文件
#define uint unsigned int
#define uchar unsigned char
uchar temp;
sbit beep=P2^3;
void delay(uint);
void main()
{
temp=0xfe;//第一个灯亮
P1=temp;
beep=0;//灯亮之后蜂鸣器发声
while(1)
{
delay(250);
beep=1;
temp=_crol_(temp,1);
delay(250);
P1=temp;
beep=0;
}
}
void delay(uint z)//延迟子函数
{
uchar x,y;
for(x=z;x>0;x--)
for(y=150;y>0;y--);
}
作者:Benni-King